Изобретение относится к двухка- нальным нелинейным корректирующим устройствам и может быть использовано в быстродействующих системах позиционирования, например станках с программным управлением, приводах роботов- манипуляторов, высококачественных следящих системах и т.д.
Цель изобретения - повышение экономичности и надежности работы устройства .
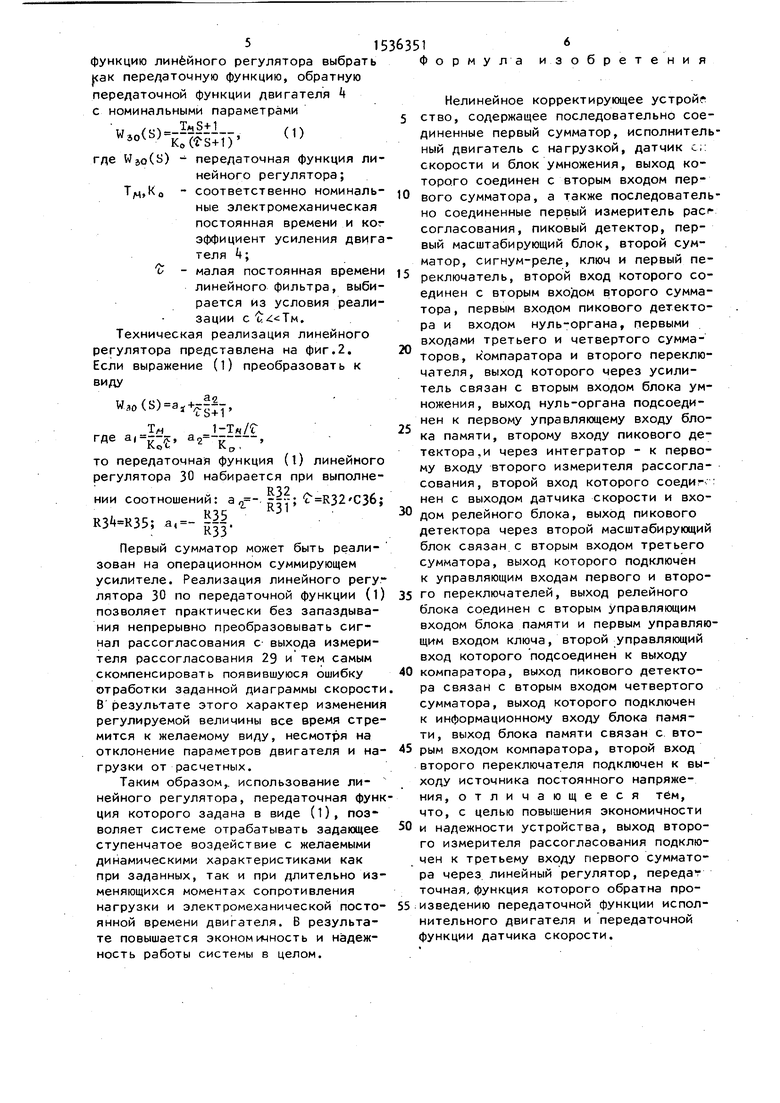
На фиг. 1 показана блок-схема устройства; на фиг. 2 - принципиальная электрическая схема линейного регулятора.
Нелинейное корректирующее устройство (фиг. 1) содержит первый измеритель рассогласования 1, блок 2 умножения., первый сумматор 3 исполнительный двигатель 4 с нагрузкой, датчик 5 скорости, нелинейный корректирующий блок 6, пиковый детектор 7, первый масштабирующий блок 8, второй сумматор 9, сигнум-реле 10, первый переключатель 11, второй масштабирующий блок 12, третий сумматор 13, второй переключатель 14, источник 15 постоянного напряжения, нуль-орган 16, усилитель 17, четвертый сумматор 18, блок 1У памяти, компаратор 20, ключ 21, релейный блок 22, первый и второй входы 23,24 и первый, второй, третий выходы 25,26,27 нелинейного кор- ректирующего блока 6, интегратор со сбросом 28, второй измеритель рассо- гласования 29, линейный регулятор 30. Линейный регулятор 30 содержит резисторы 31 - 35, конденсатор 36, операционные усилители 37 и 38, общую шину 39.
СП
оо о со ел
315
Рассмотрим работу нелинейного корректирующего устройства при постоянном моменте сопротивления нагрузки и неизменной электромеханической постоянной времени двигателя для двух случаев: треугольного и трапецеидального профилях диаграммы скорости исполнительного двигателя,
лом рассогласования с выхода измерителя рассогласования 1 и в тот момент, когда их значения сравняются, на выходе компаратора 20 появляются сигнал, замыкающий ключ 21.
При этом сигнал с выхода сигнум- реле 10 через ключ 21 и переключатель 11 подается на сумматор 3, в ре
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1984 |
|
SU1226403A2 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1126925A1 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Импульсный регулятор | 1984 |
|
SU1170426A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1425594A2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1978 |
|
SU1840029A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |

Изобретение относится к двухканальным нелинейным корректирующим устройствам и может быть использовано в быстродействующих системах позиционирования, например станках с программным управлением, высококачественных следящих системах и т.д. Целью изобретения является повышение экономичности, надежности, точности и быстродействия. Поставленная цель достигается тем, что в контур регулирования вместо релейного элемента с зоной нечуствительности вводится линейный регулирующий элемент, передаточная функция которого обратна произведению передаточной функции регулируемого двигателя и датчики скорости. 2 ил.
В первом случае насыщения скорости зультате чего обеспечивается оптивращения двигателя Ц не происходит и ключ 21 остается все время в замкнутом состоянии, так как на его управляющий вход не подается сигнал с.выхомальное торможение исполнительного двигателя . Далее при подходе к то ке позиционирования переключатели 1 и И пропускают на свои выходы сигда релейного блока 22. Поэтому в этом нал с выхода измерителя рассогласова25
30
случае система характеризуется режимом разгона, движением с постоянной скоростью, торможением и режимом апериодического движения к точке позиционирования. При этом нелинейный кор- jn ректирующий блок 6 обеспечивает режим разгона и торможения с максимально возможным ускорением aw.
В случае трапецеидального профиля диаграммы скорости исполнительного двигателя k система работает следующим образом.
Начиная с некоторого момента времени t, двигатель достигает максимально возможной скорости 0к и продолжает работать в режиме насыщения. До момента времени устройство работает так же„ как и в режиме разгона для первого случая, а в момент t« напряжение с датчика 5 скорости превышает зону нечувствительности -релейного блока 22 и на -его выходе появляется сигнал, который поступает на управляющий вход ключа 21, вызывая его размыкание. При этом нал на выходе первого переключателя 11 становится равным нулю, а сигнал с выхода источника 15 постоянного напряжения, пройдя через второй переключатель 14 и усилитель 17 перемножается в блоке 2 умножения с сиг налом с выхода датчика скорости 5, обеспечивая движение исполнительного двигателя в режиме насыщения.
В момент t4 сигнал с выхода релейного блока 22 подается также на управляющий вход блока 19 памяти, в результате чего в нем фиксируется зна- (чение сигнала с выхода сумматора 18,
35
40
45
50
ния, создавая апериодическое движение в установившемся режиме.
Рассмотрим работу системы при изменении электромеханической постоянной времени двигателя или момента сопротивления нагрузки.
На фиг. 1 можно выделить два контура. Первый включает в себя нелинейный корректирующий блок и исполнительный двигатель.
Второй контур, включающий в себя линейный регулятор и исполнительный двигатель, является более быстродействующим, чем первый контур. Динамические характеристики первого контура (системы в целом) задаются величиной входной уставки и в процессе регулирования должны оставаться постоянными. При отклонении истинных динамических характеристик системы от желаемых динамических характеристик вторым контуром при помощи линейного регулятора осуществляется подача дополнительного сигнала к сигналу управления нелинейного корректирующего устройства. Дополнительный сигнал к сигналу управления с линейного регулятора 30 поступает на третий вход первого сумматора 3 Сигнал на вход линейного регулятора 30 поступает со второго измерителя рассогласования 29 и представляет собой разность сигнала с выхода датчика 5 (формирующего истинный профиль скорости) и интегратора со сбросом 28 (формирующего желаемый профиль скорости, рассчитанный для номинального момента сопротивления нагрузки и номинального значения электромеханической постоянной времени двигателя)„ Интегратор со
которое хранится до появления на другом управляющем входе блока 19 памяти 55 сбросом работает как в известном уст- сигнала с выхода нуль-органа 16. ройстве.
В компараторе 20 сигнал с выхода Высокое быстродействие второго кон- блока 19 памяти сравнивается с сигна- тура достигается, асли передаточную
мальное торможение исполнительного двигателя . Далее при подходе к точке позиционирования переключатели 11 и И пропускают на свои выходы сиг5
0
n
5
0
5
0
ния, создавая апериодическое движение в установившемся режиме.
Рассмотрим работу системы при изменении электромеханической постоянной времени двигателя или момента сопротивления нагрузки.
На фиг. 1 можно выделить два контура. Первый включает в себя нелинейный корректирующий блок и исполнительный двигатель.
Второй контур, включающий в себя линейный регулятор и исполнительный двигатель, является более быстродействующим, чем первый контур. Динамические характеристики первого контура (системы в целом) задаются величиной входной уставки и в процессе регулирования должны оставаться постоянными. При отклонении истинных динамических характеристик системы от желаемых динамических характеристик вторым контуром при помощи линейного регулятора осуществляется подача дополнительного сигнала к сигналу управления нелинейного корректирующего устройства. Дополнительный сигнал к сигналу управления с линейного регулятора 30 поступает на третий вход первого сумматора 3 Сигнал на вход линейного регулятора 30 поступает со второго измерителя рассогласования 29 и представляет собой разность сигнала с выхода датчика 5 (формирующего истинный профиль скорости) и интегратора со сбросом 28 (формирующего желаемый профиль скорости, рассчитанный для номинального момента сопротивления нагрузки и номинального значения электромеханической постоянной времени двигателя)„ Интегратор со
5 сбросом работает как в известном уст- ройстве.
функцию линейного регулятора выбрать рак передаточную функцию, обратную передаточной функции двигателя k с номинальными параметрами
w30(s)
Т/чЗ-Н.
(О
где Wjo(S) Т/ц,К0
K0(tS+1)
передаточная функция линейного регулятора; соответственно номинальные электромеханическая постоянная времени и кот эффициент усиления двигателя +;
малая постоянная времени линейного фильтра, выбирается из условия реализации с . Техническая реализация линейного
регулятора представлена на фиг.2.
Если выражение (1) преобразовать к
виду
г
W.,o(S)aJ+-- -,
я Л а КсД
-liI«/Ј
2 к
К. „ ,
то передаточная функция (l) линейного регулятора 30 набирается при выполнеR32 | -т эо/гзА.
г R31 к-3 Ь}Ь
нии соотношений: а
a,- Ј||. KJJ
Первый сумматор может быть реализован на операционном суммирующем усилителе. Реализация линейного регулятора 30 по передаточной функции (1) позволяет практически без запаздывания непрерывно преобразовывать сигнал рассогласования с выхода измерителя рассогласования 29 и тем самым скомпенсировать появившуюся ошибку отработки заданной диаграммы скорости В результате этого характер изменения регулируемой величины все время стремится к желаемому виду, несмотря на отклонение параметров двигателя и нагрузки от расчетных.
Таким образом, использование ли- нейного регулятора, передаточная функция которого задана в виде (1), позволяет системе отрабатывать задающее ступенчатое воздействие с желаемыми динамическими характеристиками как при заданных, так и при длительно изменяющихся моментах сопротивления нагрузки и электромеханической постоянной времени двигателя. В результате повышается экономичность и надежность работы системы в целом.
ормула
6
зоб
р е т е н и я
0
5
0
5
Нелинейное корректирующее устрой ство, содержащее последовательно соединенные первый сумматор, исполнительный двигатель с нагрузкой, датчик с, скорости и блок умножения, выход которого соединен с вторым входом первого сумматора, а также последовательно соединенные первый измеритель paci- согласования, пиковый детектор, первый масштабирующий блок, второй сумматор, сигнум-реле, ключ и первый переключатель, второй вход которого соединен с вторым входом второго сумматора , первым входом пикового детектора и входом нуль-органа, первыми входами третьего и четвертого сумматоров, компаратора и второго переключателя, выход которого через усилитель связан с вторым входом блока умножения, выход нуль-органа подсоединен к первому управляющему входу блока памяти, второму входу пикового детектора через интегратор - к первому входу второго измерителя рассогласования, второй вход которого соеди- нен с выходом датчика скорости и вхо0 дом релейного блока, выход пикового детектора через второй масштабирующий блок связан с вторым входом третьего сумматора, выход которого подключен к управляющим входам первого и второ5 го переключателей, выход релейного блока соединен с вторым управляющим входом блока памяти и первым управляющим входом ключа, второй управляющий вход которого подсоединен к выходу
0 компаратора, выход пикового детектора связан с вторым входом четвертого сумматора, выход которого подключен к информационному входу блока памяти, выход блока памяти связан с вто5 рым входом компаратора, второй вход второго переключателя подключен к выходу источника постоянного напряжения, отличающееся тем, что, с целью повышения экономичности
0 и надежности устройства, выход второго измерителя рассогласования подключен к третьему входу первого сумматора через линейный регулятор, передаг точная, функция которого обратна про5 изведению передаточной функции исполнительного двигателя и передаточной функции датчика скорости.
В
Ј
Ч/Ј
iV
21
3f
18
f
20
Фиг.1
V
11
21 -А
3fr ТI-
-Ц
so
14
/v
ILT
16
15
22
qiueZ
| Нелинейное корректирующее устройство | 1984 |
|
SU1226403A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 1282076, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
