1
Изобретение относится к машинострое- ннию и может быть использовано при управлении механизмами, требующими точной остановки, например станки с числовым ппрограммным управлением, роботы-манипуляторы и т. д.
Цель изобретения - повышение точности и быстродействия системы,
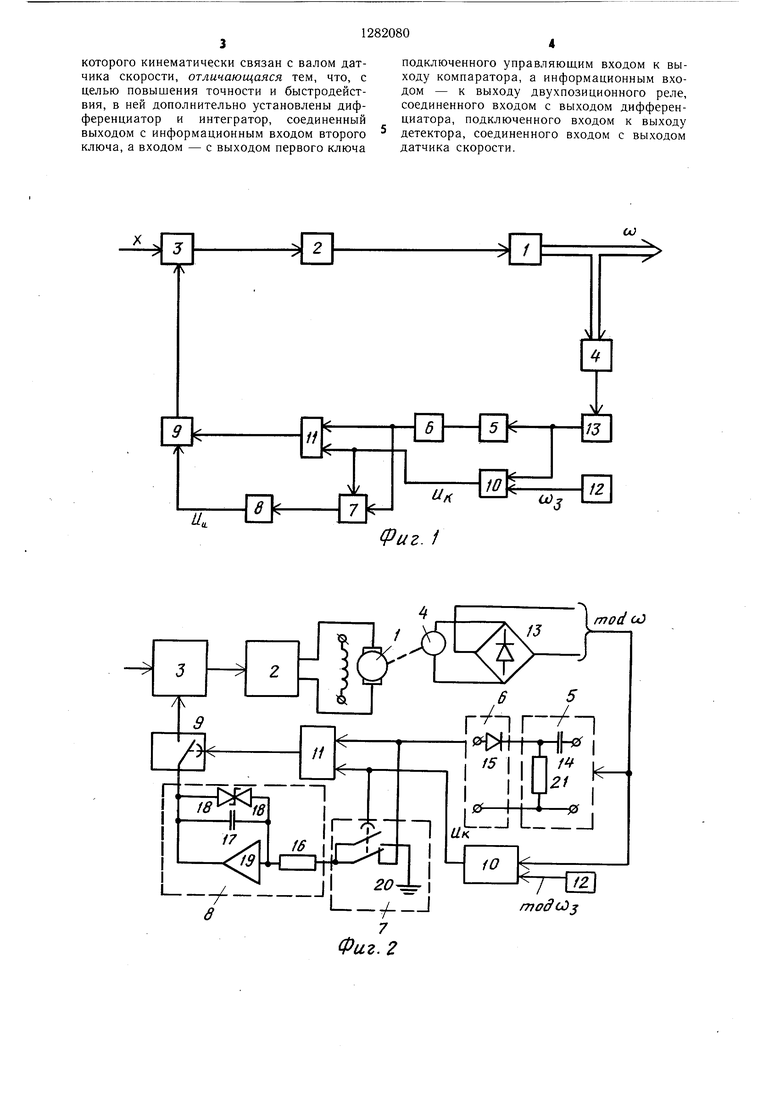
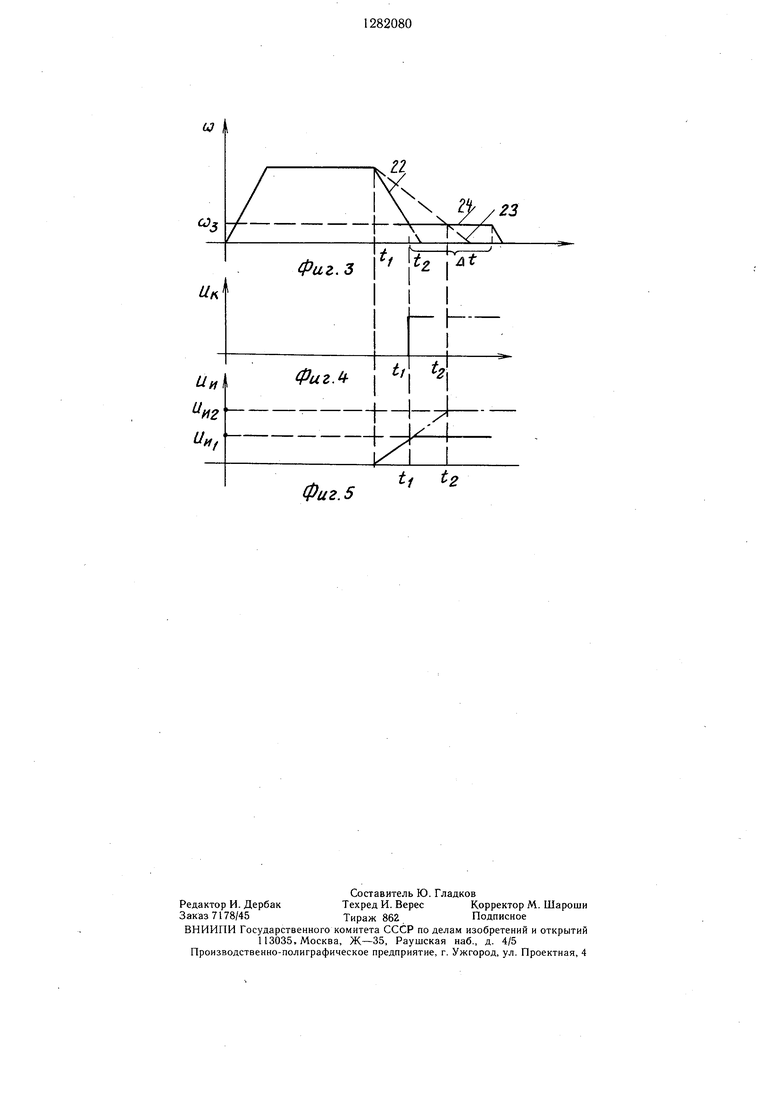
На фиг. 1 приведена блок-схема системы; на фиг. 2 - принципиальная электрическая с.чема системы; на фиг. 3 - циклограмма работы исполнительного двигателя; на фиг. 4 и 5 - эпюры выходных напряжений компаратора и интегратора.
Предлагаемая система содержит исполнительный двигатель 1, усилитель 2 мощности, формирователь 3 сигнала управления, датчик 4 скорости, дифферециатор 5, двух- позиционное реле 6, первый ключ 7, интегратор 8, второй ключ 9, компаратор 10, элемент И 11, источник 12 постоянного напряжения, детектор 13, конденсатор 14, диод 15, резистор 16, конденсатор 17, стабилитрон 18, операционный усилитель 19, общую щину 20 и резистор 21.
Кроме того, приняты следующие обозначения: кривые, диаграмм скоростей 21-24; О) - текущая скорость вращения вала исполнительного двигателя 1; юз - заданная скорость вращения вала исполнительного двигателя 1; (Ук - выходной сигнал компаратора 10; и„ - выходной сигнал интегратора 8.
Двухпозиционное реле 6 контролирует знак выходного сигнала дифференциатора 5. Оно содержит диод 15 (фиг. 2). Дифференциатор 5 содержит резистор 24 и Kok- денсатор 14 (фиг. 2). Интегратор 8 содержит резистор 16, конденсатор 17, два стабилитрона 18 и операционный усилитель 19 (фиг. 2).
Система работает следующим образом.
Датчик 4 скорости, в качестве которого могут быть использованы тахогенератор или потенциометр, контролирующий ЭДС двигателя 1, формирует на своем выходе сигнал, пропорциональный скорости вращения вала двигателя. Этот сигнал выпрямляется в детекторе 13, выходной сигнал которого поступает на вход дифферециатора 5 и на первый вход компаратора 10. Выходной сигнал дифференциатора 5 поступает на вход двухпозиционного реле 6, которое осуществляет определение ускорения вращения вала исполнительного двигателя 1. При торможении, когда дифференциал модуля скорости отрицателен, через первый ключ 7 на вход интегратора 8 поступает отрицательный сигнал.
Интегрирование сигнала в интеграторе 8 происходит до тех пор, пока скорость двигателя 1 не спадает до заранее заданного значения шз (фиг. 3). В этот момент срабатывает компаратор 10 (фиг. 4), переключая контакты первого ключа 7. Вход интегра1282080
5
тора 8 отключается от выхода двухпозиционного реле 6 и подключается к общей щине 20. На выходе интегратора 8 устанавливается постоянный сигнал U« (фиг. 5), значение которого зависит от темпа уменьшения скорости двигателя 1 от максимальной до некоторой заранее заданной величины . Так, например, при уменьщении скорости с темпом по кривой 22 (фиг. 3) компаратор 10 срабатывает в момент t (фиг. 4), а интег0 ратор 8 имеет на выходе постоянное напряжение (Уи| (фиг. 5). При более медленном уменьщении скорости двигателя 1 по кривой 23 (фиг. 3) компаратор 10 срабатывает в момент 2 (фиг. 3), а на выходе интегратора 8 формируется сигнал (/иг по величине больщий, чем сигнал Этот сигнал, пропорциональный времени торможения двигателя 1 от максимальной скорости вращения до некоторой заданной, через второй ключ 9 поступает на вход изменения проQ граммы формирователя 3 сигнала управления.
Элемент И 11 замыкает клЮч 9 и раз- рещает прохождение сигнала с выхода интегратора 8 только в том случае, если идет торможение, т. е. имеет место отрицательное
5 значение дифференциала модуля скорости, и скорость уменьшается до определенной величины 0)3. Формирователь сигнала управления 3 выбирает время позиционирования с малой скоростью- шз. Допустим, что спад скорости происходит по кривой 22. При этом с выхода интегратора 8 поступает сигнал t/Hi, который пропорционален времени торможения двигателя 1 от максимальной скорости вращения до заданной скорости соз- Далее, при подходе к точке позиционирования формирователь 3 сигнала управления выбирает время позиционирования At с малой скоростью Wj, обратно пропорциональное выходному напряжению Un интегратора 8. Уменьщение скорости происходит с прежним темпом, если скорость
0 изменяется по кривой 24 (фиг. 3).
Таким образом, предлагаемая система позволяет простым способом автоматически выбирать режим торможения, причем время позиционирования и точность не зависят от изменения момента инерции системы и ее момента статического сопротивления.
Формула изобретения
Система позиционирования, содержащая первый ключ, компаратор, подключенный первым входом к выходу детектора, вторым входом - к выходу источника постоянного напряжения, а выходом - к одному из входов элемента И, другим входом соединенного с выходом двухпозиционного реле, а выходом - с управляющим входом второ- 5 го ключа, подключенного выходом к входу формирователя сигнала управления, соединенного выходом через усилитель мощности с входом исполнительного двигателя, вал
0
5
0
которого кинематически связан с валом датчика скорости, отличающаяся тем, что, с целью повышения точности и быстродействия, в ней дополнительно установлены дифференциатор и интегратор, соединенный выходом с информационным входом второго ключа, а входом - с выходом первого ключа
подключенного управляющим входом к выходу компаратора, а информационным входом - к выходу двухпозиционного реле, соединенного входом с выходом дифференциатора, подключенного входом к выходу детектора, соединенного входом с выходом датчика скорости.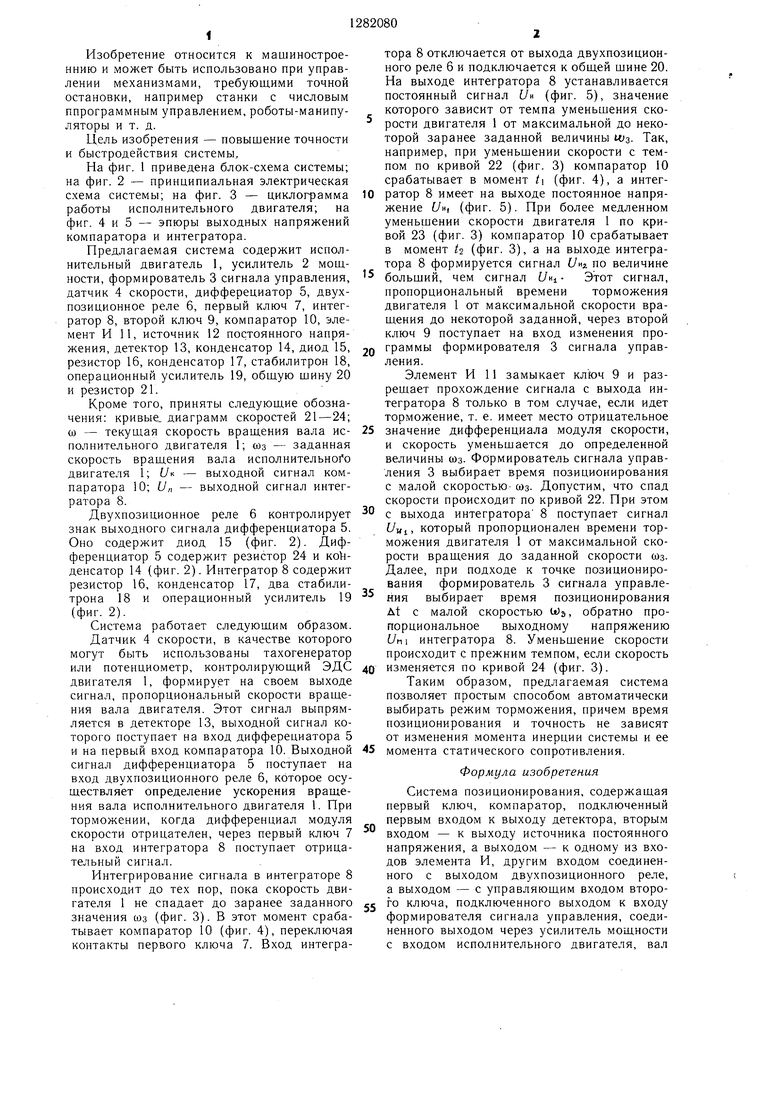
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1989 |
|
SU1734070A1 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1425594A2 |
| Устройство для сортировки корнеплодов | 1986 |
|
SU1329658A1 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1226403A2 |
| Устройство для регулирования режимов работы скиповых подъемных установок | 1987 |
|
SU1430334A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДАЧЕЙ ТОПЛИВА К ДИЗЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2011552C1 |
| Система экстремального регулирования | 1981 |
|
SU1056132A1 |
| Противоблокировочное устройство тормозной системы транспортного средства | 1979 |
|
SU1662884A1 |
Изобретение относится к машиностроению и может быть использовано при управлении механизмами, требующими точной остановки, например станками с числовым программным управлением, роботами-манипуляторами и т. д. Цель изобретения - по- выщение точности и быстродействия системы. Поставленная цель достигается за счет того, что выходной сигнал датчика скорости детектируется, дифференцируется и у него определяется знак. Сигнал, пропорциональный знаку, подается на первый вход элемента И и информационный вход первого ключа. Кроме того, продетектированный сигнал сравнивается с выходным сигналом постоянного напряжения в компараторе, на выходе которого формируется . единичный сигнал, если продетектированный сигнал меньше заданного постоянного сигнала. Выходной сигнал компаратора поступает на второй вход элемента И и на управляющи й вход первого ключа. Выходной сигнал первого ключа поступает на вход интегратора, а с его выхода - на информационный вход второго ключа, на управляющий вход которого подается выходной сигнал элемента И. Сигнал с выхода второго ключа поступает на вход формирователя сигнала управления, выходной сигнал которого через усилитель мощности поступает на вход исполнительного двигателя. Начиная с момента времени поступления сигнала с выхода второго ключа на вход формирователя сигнала управления, последний выбирает время позиционирования Д/ с заданной скоростью, обратно пропорциональной выходному сигналу интегратора. 5 ил. о (Л Ю 00 to
П
II-
Vl
I- с : НС--О1
JJl 20
I T -J
7
Фиг. 2
65
l ffhrli- l
- 14 U
II II
| Хлыпало Е | |||
| И | |||
| Нелинейные корректирующие устройства в автоматических системах.-Л.: Энергия, 1973, с | |||
| Прибор для измерения угла наклона | 1921 |
|
SU253A1 |
| Следящая система | 1984 |
|
SU1216773A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
