Изобретение относится к автомати-- ке и вычислительной технике и предназначено для использования в системах управления шаговыми приводами прецизионных координатных столов.
Целью изобретения является увеличение быстродействия и функциональных возможностей.
. На фиг. 1 представлена функцио- нальная схема устройства; на фиг. 2- 4. т временные диаграммы его работы: на фиг. 5 - кривые разгона и торможения для случаев холостого хода и прохода с деталью;, на фиг. 6 - 7 ва-i рианты реализации делителя 7 и временные диаграммы работы.
Устройство содержит генератор 1 импульсов, счетчик 2 импульсов, блок 3 памяти, первый триггер 4, счетчик 5 числа шагов, схему 6 сравнения, делитель 7 импульсов, первый 8, и второй 8j элементы ШШ, элемент И 9,
второй триггер 10, входы 11 -начальной установкиJ 12 - признака отсутстВИЯ детали, 13 - числа шагов, 14 - запуска устройства, выход 15 устройства.
Блок. 3 памяти хранит таблицу коэффициентов деления для реализации кри- вой разгона торможения, схема 6 сравнения предназначена для сравнения i номера текущего коэффициента с теку- пщм числом шагов для определения мо- мента перехода к режиму торможения, второй триггер 10 управляет растягиванием кривой разгона в зависимости от состояния на входе 12 признака отсутствия детали. При состоя-, НИИ 1 на входе 12 устройство мирует более крупную характеристику разгона - быстрый разгонj при состоянии О - пологий, растянутый (разгон, приводящий к той же максимальной частоте, что и быстрый разгон, но со значительно меньшими ускорениями, это позволяет устройству адаптироватыря к увеличению сопротивления на исполнительном приводе. Счетчик 5 числа шагов предназ- начен для приема с входа 13 числа шагов, которое необходимо отработать приводу, а также для декрементирова- ния текущего числа шагов в процессе работы. Сигнал с выхода заема счетчика 5 идентифицирует окончание отработки заданного числа шагов: этот сигнал переводит устройство в состояние Стоп.
В исходном состоянии на вход 11 начальной установки (Н.У.) подается импульс, сбрасывающий счетчик 2 импульсов и первый триггер 4 в нуле- вое состояние и устанавлиззающий второй триггер 10 в единичное состояние Нулевой сигнал с выхода триггера 4 поступает на вход разрешения делителя 7 импульсовJ запрещая его работу. Нулевой код поступает на адрес- ньй вход блока 3 памяти, на выходе которого появляется начальный коэффициент деления, соответствующий периоду.tg приемистости исполнительного привода. Устройство находится в .режиме ожидания --в состоянии Стоп.
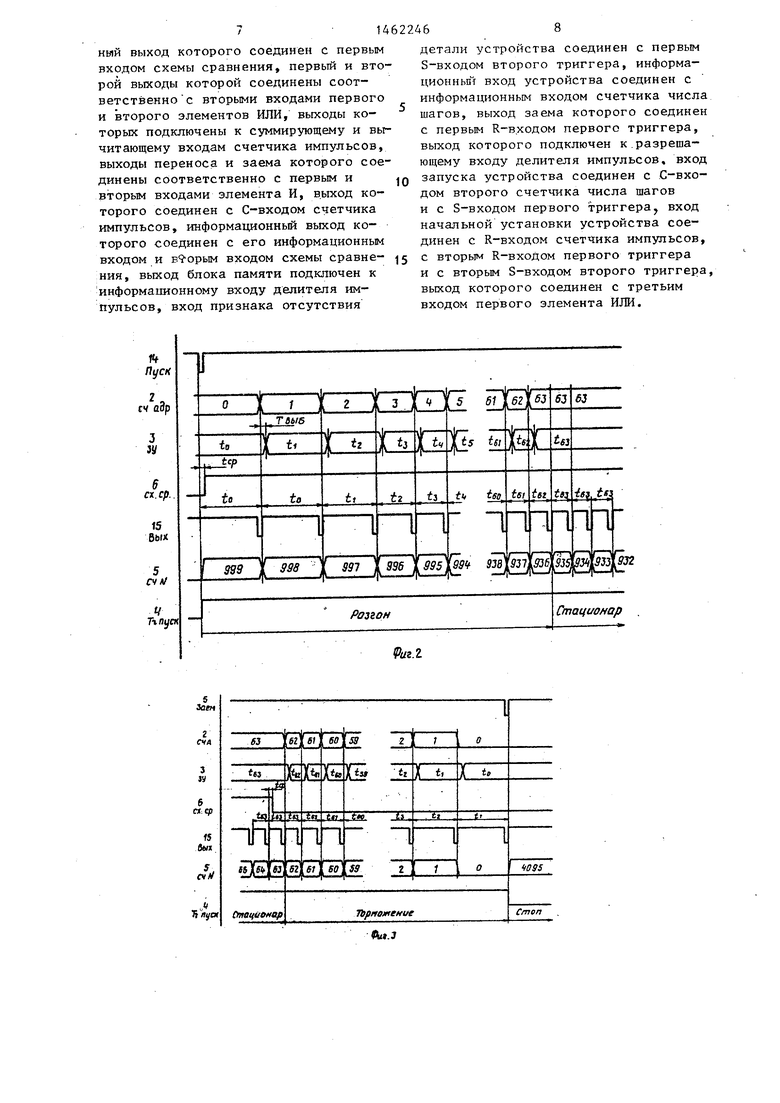
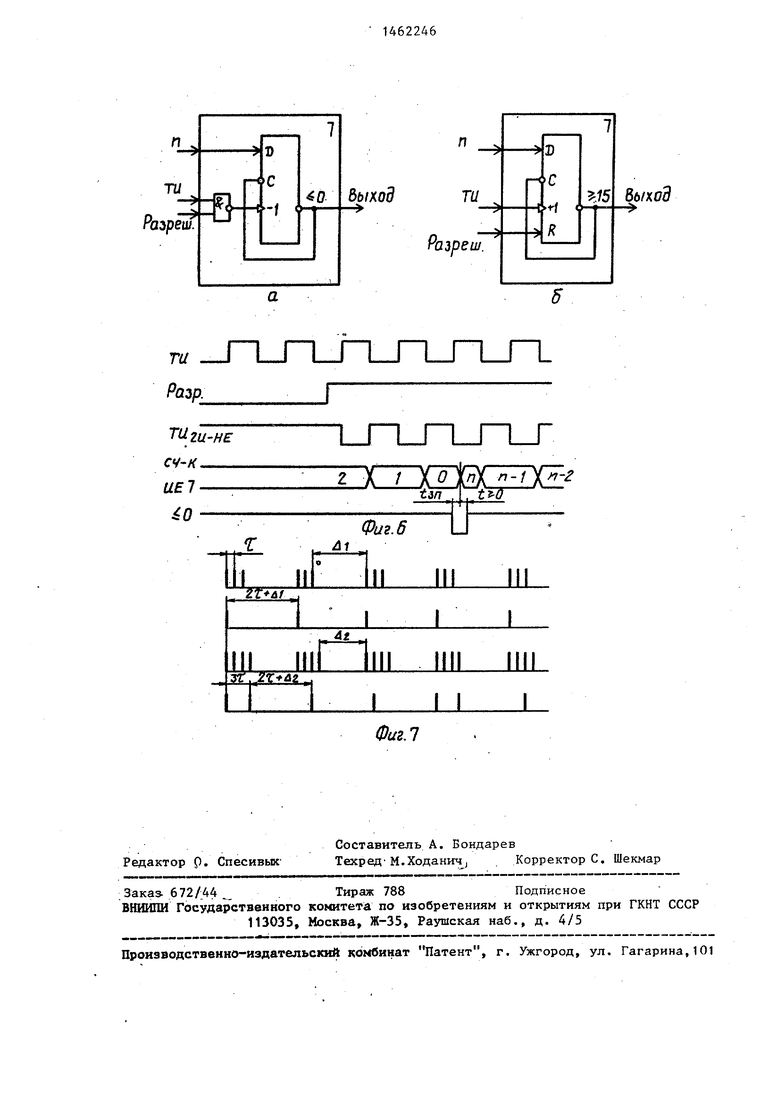
Рассмотрим работу устройства при сигнале 1 на входе 12 признака отг сутствия детали (ПР). Этот случай соответствует отсутствию детали в исполнительном органе, т.е. движению, например, в-исходное положение к накопителю деталей. На вход 13 подается число шагов, на вход 14 импульс Пуск. По этому импульсу код с входа-13 заносится в счетчик 5. триггер 4 устанавливается в единичное состояние (состояние работы), разрешая работу делителю 7 (см. фиг. 2). Рассмотрим работу делителя; В варианте а происходит декремент двоичного кода, поступившего в счетчик, в варианте б инкремент. Величина задержки выходного импульса в первом случае прямо пропорциональна, во втором случае обратно пропорциональна величине двоичного кода, по- ступившего на делитель 7 с выхода памяти 3. Запись-двоичного кода осуществляется сигналом с выхода заема (вариант а или с выхода переполнения (вариант б), который подается на вход записи(с)счетчика. В данном случае сигнал установки коэффициента. нет необходимости формировать внешними блоками, так как он формируется самим делителем 7. Рассмотрим диагра му работы делителя 7, реализованного по варианту а. Сигнал на вьпсоде заема (О) находится в состоянии 1. (неактивное состояние) в процессе декремента счетчика до тех пор. nor ка счетчик не достигнет нулевого состояния. В этом такте с поступлением О (активное состояние). О поступает на вход записи счетчика, что приводит к загрузке в счетчик двоичного кода п (с задержкой на время записи t.- ). Так как счетчик утратил
нулевое состояние, сигнал заема также исчезает (с задержкой на время дешифрации нулевого состояния t 6 О) Счетчик продолжает декремент с заданного извне состояния п. Запретить декремент можно подачей сигнала О, на второй вход г.ентиля 2И-НЕ. Второй вариант б не требует дополнительной логики для управления. В качестве входа, запрещающего счет (деление) , используется вход обнуления счетчика. В делитель 7 заносится начальный коэффициент деления, и через соответствующий ему период t на его выходе вырабатывается первый импульс . Состояние на выходе блока 3 памяти не изменилось, и делитель 7 вновь начнет деления частоты с пет риодом t. Так как на втором входе (А) схемы 6 сравнения нулевой код, а на первом (В) - ненулевой, то на первом выходе (л В) схемы 6 сигнал О, на втором выходе () - 1, триггер 10 удерживается в состоянии 1 сигналом с входа 12 (деталь в исполнительном органе отсутствует) . Содержимое счетчика 2 увеличивается на единицу и будет равно 00...01. Этот код поступает на адресный вход блока 3 памяти, через время выборки Те„в на его выходе появится код коэффициента деления, еоответ- ствующего периоду t, . Делитель 7 через время t формирует второй импульс, по которому содержимое счет- лика 2 увеличится, а счетчика 5 уменьшится на единицу.Делитель 7 начнет период деления, t,. Таким образом, состояние счётчика 2 будет возрастать с каяодым выходным импульсом; каждому из этих состояний соответствует коэффициент деления в блоке 3 памяти. Задавая эти коэффициенты, можно формировать произвольную кривую изменения частоты (периода) выходных импульсов, например S-образный экспоненциальный закон. При достижении счетчиком 2 максимального состояния на его выходе переноса появляется сигнал переноса (обычно инверсный). На выходе заема - 1 (этот выход также инверсный) . В результате через элемент И 9 инверсный сигнал (О) с выхода переноса поступает на вход записи счетчика 2. Этот вход также инвер
622А6
сный. Так как информация (вес единицы) с выхода счетчика 2 поступает на его информационный вход, то происходит подтверждение его состояния несмотря на поступление импульса на вход прямого счета. С этого момента счетчик 2 перестает менять свое состояние (все единицы). Этому 10 состоянию соответствует коэффициент
деления в блоке 3 памяти, задающий максимальную частоту выходных импульсов, на фиг. 2 - импульсы с периодом tj, . Устройство переходит из ре- 15 жима разгона в режим стационарного движения. Состояние счетчика 5 продолжает уменьшаться с каяздым выходным импульсом.
20 В такте, в котором состояние счетчика 5 станет равным состоянию счетчика 2, происходит смена состояний схемы 6 сравнения: на первом выходе (AS В) через время сравне25 ния
t появится 1., на втором выходе (А В) - О. Очвередные
импульсы с вькода делителя 7 будут с этого момента проходить через элемент ИЛИ 8 на вычит ающий вход
30 счетчика 2. С каждым тактом будет уменьшаться не только содержимое счетчика 5, но и содержимое счетчика 2. Начнется перебор таблицы коэффициентов в блоке 3 памяти в
-с обратном порядке - устройство перейдет к режиму торможения (фиг. 3). Счетчики 2 и 5 одновременно достигнут нулевого состояния. При этом сигнал с выхода заема счётчика 5 сбро40 сит триггер 4 в состояние О (сос- тояние Стоп) . Сигнал с выхода за- .ема счетчика 2, пройдя элемент И 9 .приведет к записи в счетчик 2 его собственного состояния - произойдет под45 тверждение состояния 00.оо. В результате импульсы на выход 15 устройства поступать перестанут, счетчики 2, 5 и триггер 4 будут в нулевом состоя НИИ,т.е. устройство перейдет в состоя50
ние Стоп, при этом его элементы
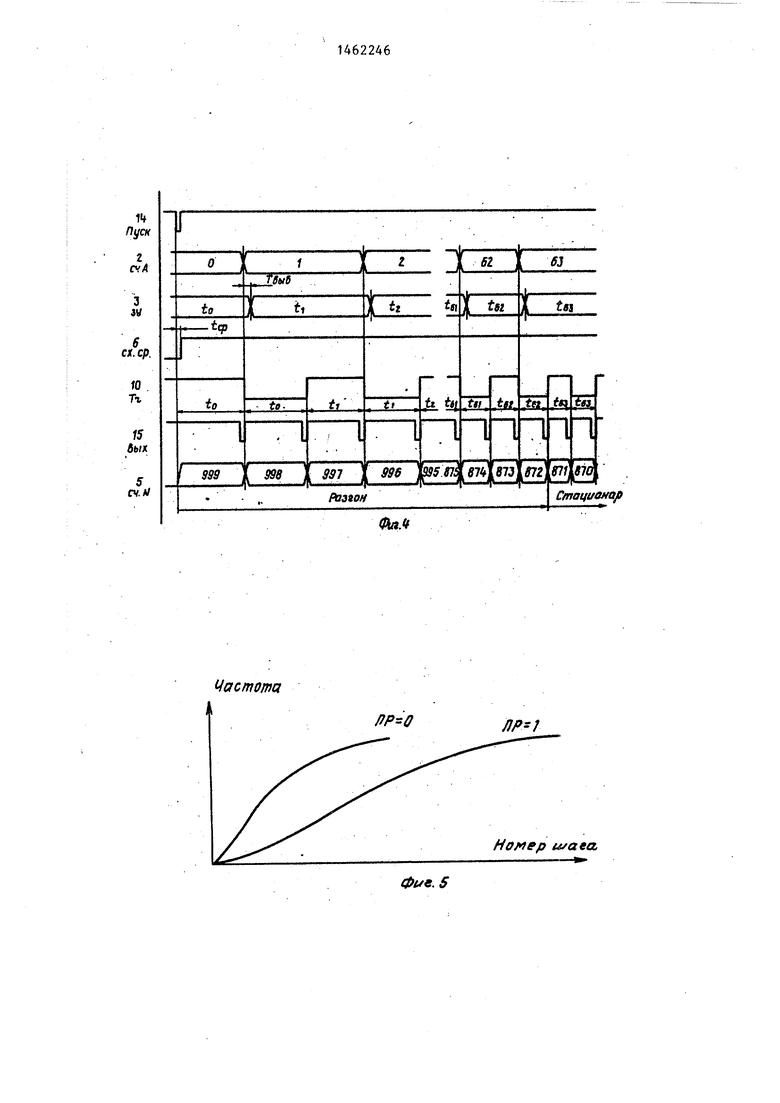
окажутся в с остоянии начальной установки. Следовательно, при очередном запуске устройства нет необходимости в импульсе начальной установки (вход 55 11 Н.У.). На временных диаграммах фиг. 2, 3 в качестве примера принято: число шагов - 1000 (на вход 13 подается число, меньшее на единицу), число шагов разгона - 64.
Рассмотрим работу устройства при г1овьш1енной нагрузке на исполнительно приводе. В этом случае от внешних да чиков на вход 12 признака подается О (деталь находится в захвате), В результате триггер 10 получает возможность работать в счетном режиме (см. фиг. 4). меняя в каждом такте свое состояние. Это приводит к тому что в режиме разгона в четных тактах элемент ИЛИ 8 закрывается для про- ; хождения импульсов и счетчик 2 ин- ; крементирует свое состояние в два i раза медленнее. Количество шагов в i режиме разгона удваивается - увели- чивается время разгона и, следова- тельно, уменьшается величина уско- ; рений в приводе. Это позволяет раз- : гонять нагруженный привод. На фиг, 5 ; представлен пример кривых разгона для нагруженного (Пр 0) и ненагру- : женного (ПР-1) привода. При быст- ; ром разгоне выходные импульсы уст i ройства, все время увеличивающие I свою частоту, несколько опережают фазу вращения ротора шагового дви- . гателя - образуется набег фазы, по- стоянно поддерживаемый в режиме разгона. Этот набег, фазы приводит к по вьшенным величинам ускорения привода увеличивая его быстродействие. При медленном разгоне (при повьшенной нагрузке) на шаговый двигатель поступают пары импульсов с одинаковой частотой. В результате набег фазы, образовавшийся при первом импульсе каждой из этих пар, ликвидируется, при втором импульсе (период этого импульса не уменьшается, как при быстром разгоне по сравнению с периодом первого импульса, а равен ему это позволяет ротору двигателя догнать по фазе второй импульс). Отсутствие набега по фазе облегчает ро- Тору переход к отработке очередной пары шагов. Таким образом, при медленном разгоне уменьшается не толь- ко величина интегрального ускорения .(за счет увеличения длительности разгона), но также уменьшается и величина мгновенных ускорений (за счет отсутствия постоянного набега фазы). Первый параметр влияет на вероятность срыва вращения ротора двигателя, второй - на вероятность пропуска шагов. В результате медленны разгон позволяет разгонять привод при увеличенной нагрузке с уменьше
20
22466
кием вероятности срыва вращения и пропуска шагов.
Рассчитаем минимальный дискрет изменения частоты выходных импульсов. Для частоты 20 МГц генератора (максимальная частота для 155 серии) и максимальной частоты выходных импульсов 15 КГц (максимальная частота
10 импульсов для. шагового двигателя ДЩ-200) коэффициент деления равен 1333. Для ближайшего коэффициента, равного 1334j частота выходных импульсов будет равна 14992 Гц. Дискрет
15 в области высоких частот равен 8 Гц. В области малых частот он значительно меньше.
Таким образом, рассматриваемое устройс тво имеет возможность реализовать любую форму кривой разгона с высокой точностью (,5%,, позволяя выбрать оптимальный закон. Оно самостоятельно о пределяет моменты смены режимов (разгон-стационар-тор: можение), не загружая ресурсы системы управления высшего уровня и упрощая протокол обмена с нею. На основе одной таблицы коэффициентов устройство может реализовывать два закона разгона. Это позволяет устройству адаптироваться к увеличению и уменьшению нагрузки в исполнительном приводе. Все это увеличивает функциональные возможности и среднее быстродействие устройства.
Формулаизобретения
Устройство для программного уп- . рав-пения, содержащее генератор импульсов, блок памяти и триггер, счетчик импульсов, информационньй выход которого coe JИнeн л адресным
входом блока памяти, отличающееся тем, что, с целью увеличения быстродействия и функциональных возможностей, в устройство введены счетчик числа шагов, схема сравнения, делитель импульсов,, два элемента ИЛИ, элемент И и второй триггер, причем выход генератора импульсов соединен с входом синхронизации делителя импульсов, .выход которого является выходом устройства и подключе к первым входам первого и второго элементов ШШ, к счетному входу второго триггера и к вычитающему входу счетчика числа шагов, информаци он7 14
НИИ выход которого соединен с первым входом схемы сравнения, первый и второй выходы которой соединены соответственно с вторыми входами первого и второго элементов ИЛИ, выходы которых подключены к суммирующему и вычитающему входам счетчика импульсов, выходы переноса и заема которого соединены соответственно с первым и вторым входами элемента И, выход которого соединен с С-входом счетчика импульсов, информационньй выход которого соединен с его информационным входом и в9 0рым входом схемы сравне- ния, выход блока памяти подключен к информапионному входу делителя импульсов, вход признака отсутствия
8
детали устройства соединен с первым S-входом второго триггера, информационньй вход устройства соединен с информационньЕм входом счетчика числа шагов, выход заема которого соединен с первым R-входом первого триггера, выход которого подключен к.разрешающему входу делителя импульсов, вход запуска устройства соединен с С-входом второго счетчика числа шагов и с S-входом первого триггера, вход начальной установки устройства соединен с R-входом счетчика импульсов, с вторым R-вхоДом первого триггера и с вторым S-входом второго триггера выход которого соединен с третьим входом первого элемента ИЛИ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1986 |
|
SU1352462A1 |
| Устройство для программного управления | 1987 |
|
SU1434407A1 |
| Устройство для программного управления | 1987 |
|
SU1550476A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1374395A1 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1374182A1 |
| Устройство управления шаговым двигателем | 1987 |
|
SU1539727A1 |
| Устройство для управления разгоном и торможением двигателя | 1983 |
|
SU1124252A1 |
| Многоканальное устройство программного управления шаговыми двигателями | 1985 |
|
SU1320794A1 |
| Устройство для разгона и торможения двигателя исполнительного механизма | 1986 |
|
SU1361507A1 |
| Устройство для преобразования цифрового кода скорости вращения шагового двигателя в частоту импульсов | 1986 |
|
SU1325413A1 |
Изобретение относится к автоматике и вычислительной технике и предназначено для управления шаговы- .ми электроприводами станков с ЧЩ и прецизионных манипуляторов. Цель изобретения - расширение функциональных возможностей и увеличение быстродействия. Устройство для программного управления содержит генератор импульсов 1, счетчик импульсов 2, блок па- мяти 3, триггеры 4, 10, элементы ИЛИ 8 и 82, схему сравнения 6, делитель импульсов 7, элемент И 9, счетчик 5 числа шагов. Устройство формирует задаваемое извне число импульсов для исполнительного привода с часто- той, изменяющейся по закону, определяемому информацией в блоке 3 памяти. Схема 6 сравнения определяет момент начала торможения. Триггер 10 регулирует поступление инкременти- рующих импульсов на счетчик 2, обеспечивая два закона разгона. 7 ил. . с (Л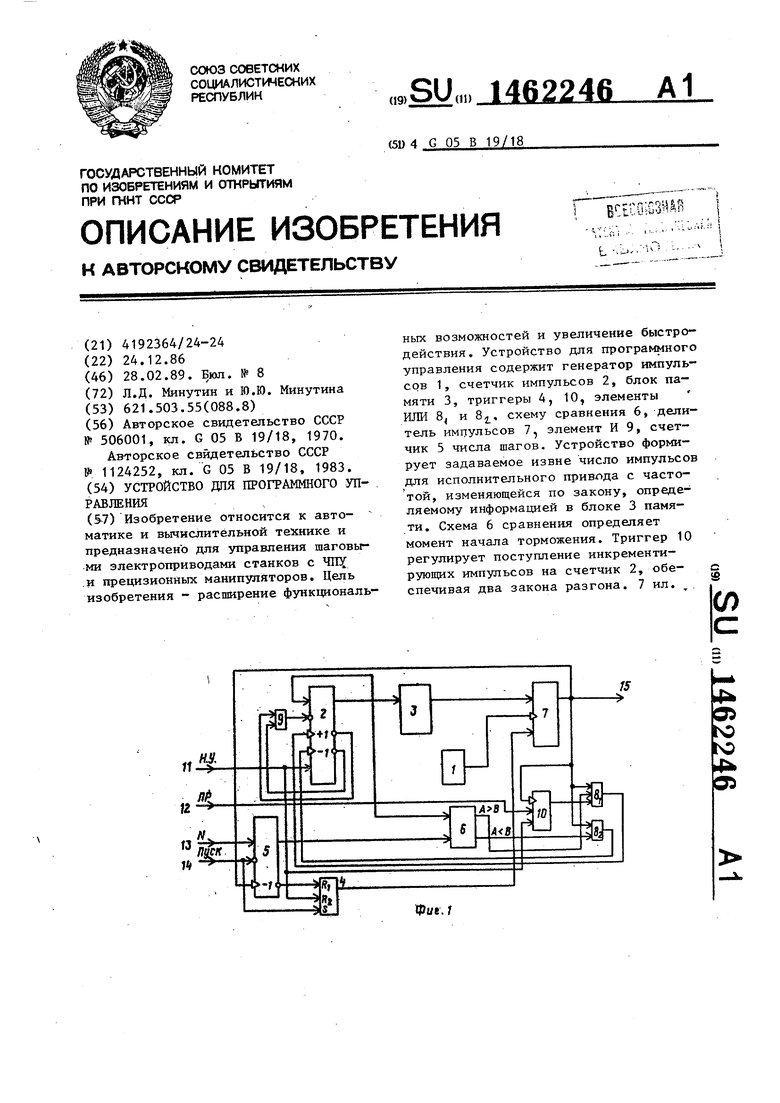
Пуск
2 ,
(Ч аЭр
J
ЗУ
6
п.ср..
15
бых
3
ЗУ
6
а. ер
IS в«п.
lit Пуск
г
СУА
3 М
6 сх.ср.
ю
Тг
Цастотц
ЛР-1
фие. 5
та Разр.
Е
|. - 1°
I III
ттттшгрту
tm л WS Фа2.6 U°
111
JJJЖ
JJJЖ
Фиг.1
| Устройство для разгона и торможения исполнительного двигателя станка | 1973 |
|
SU506001A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления разгоном и торможением двигателя | 1983 |
|
SU1124252A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
