Изобретение относится к автоматике и вычислительной технике и предназначено для использования в системах управления шаговыми приводами прецизионных координатных стволов.
Цель изобретения - увеличение надежности и упрощение наладки устройства.
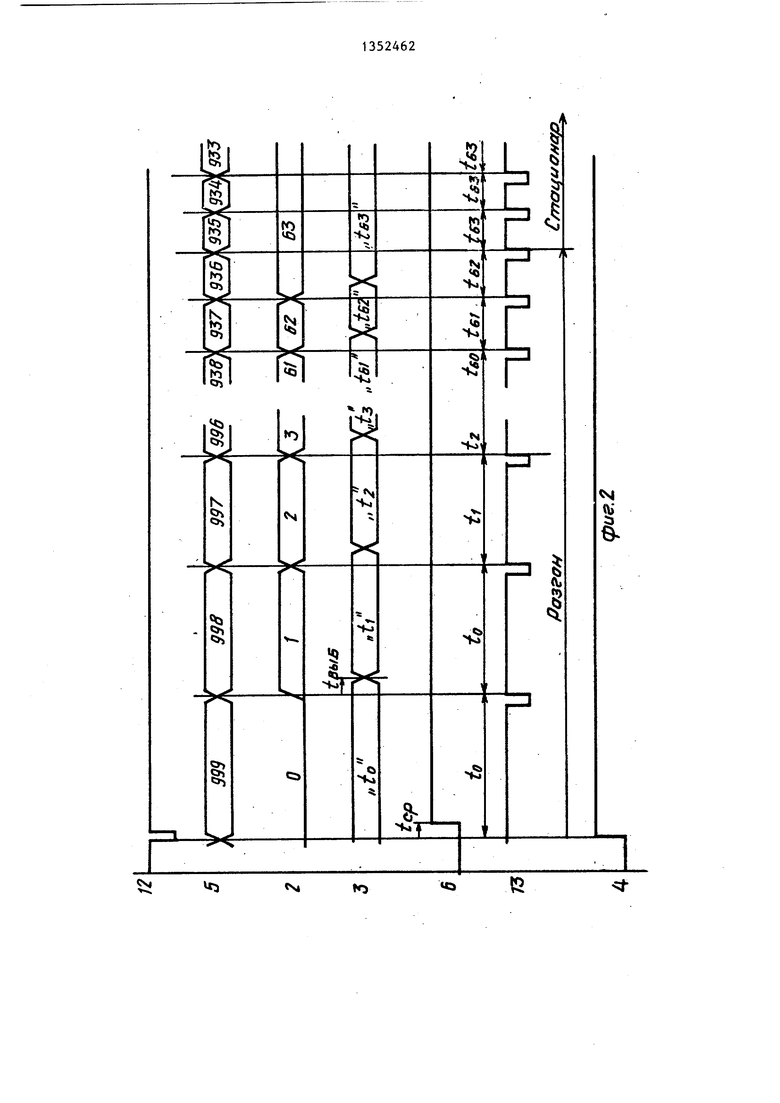
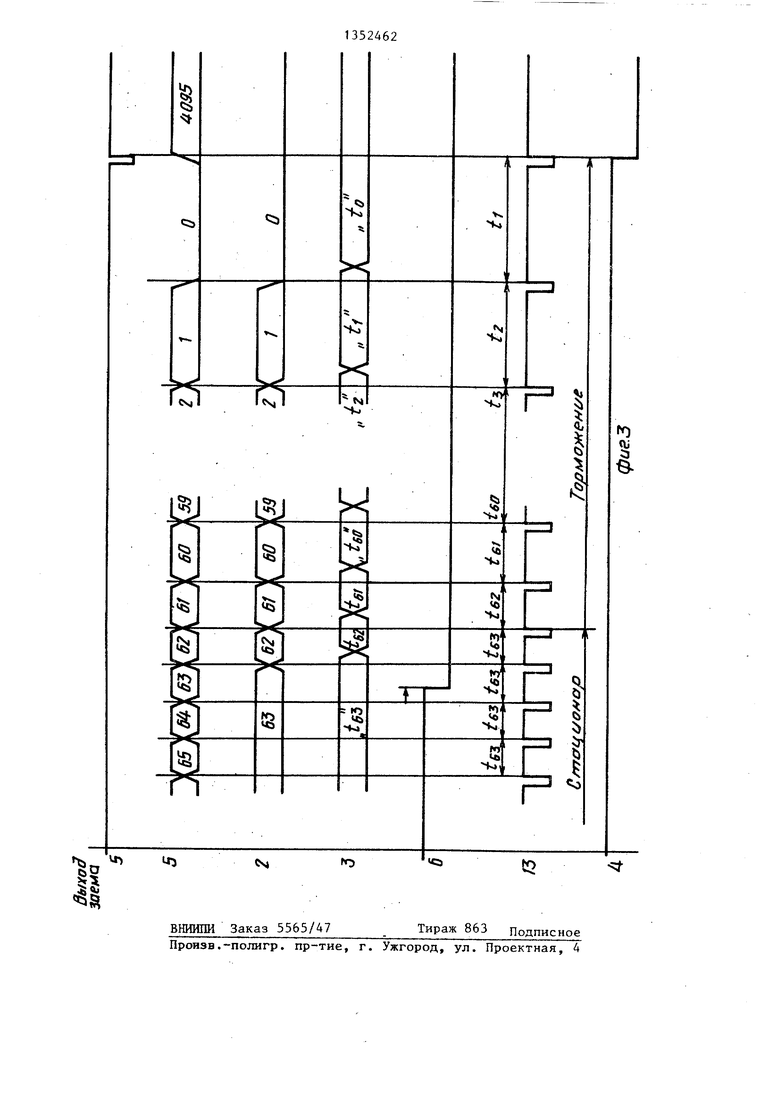
На фиг. 1 представлена функциональная схема устройства} на фиг. 2, 3 - временные диаграммы работы устройства.
Устройство содержит генератор 1 импульсов, первый счетчик 2 импульсов, блок 3 памяти, триггер 4, второй счетчик 5 импульсов, блок 6 сравнения, частотный делитель 7, два элемента ИЛИ 8.1 и 8.2, элемент И 9, вход 10 начальной установки (НУ), информационный вход 11, вход 12 запуска, выход 13 рабочих импульсов F и выход 14 признака окончания движе- жения. Счетчик 2 импульсов формирует последовательность адресов для блока 3 памяти, в котором хранится таблица коэффициентов деления частоты задающего генератора 1, Таблица коэффициентов определяет форму кривой разго- нв-торможения. Счетчик 5 импульсов предназначен для приема с входа 11 .числа шагов, которое необходимо отработать исполнительному приводу, а также для декрементирования текущего числа шагов. Блок 6 сравнения управляет поступлением импульсов на суммирующий и.вычитающий входы счетчика 2 импульсов, определяя момент начала торможения. Триггер 4 идентифицирует режим пуска и окончания работы устройства и, соответственно, исполнительного привода. Устройство формирует заданное извне число импульсов на выходе 13 с частотой, изменяющейся в соответствии с программой, хранимой в блоке 3 памяти.
Устройство работает следующим образом.
В исходном состоянии на вход 10 НУ поступает импульс, сбрасывающий счетчик 2 импульсов и триггер 4 в нулевое состояние. Нулевой сигнал с выхода триггера 4 поступает на разрешающий вход делителя 7, запрещая его работу. Нулевой код поступает на адресный вход блока 3 памяти, на выходе которого появляется начальный коэффициент деления, соответствуюпрй периоду t- приемистости исполнитель
0
5
него привода. Устройство находится в режиме ожидания. Затем на вход 11 подается двоичный код, равный необходимому числу шагов, на вход 12 - импульс запуска. По этому импульсу двоичный код с входа 11 заносится в счетчик импульсов 5, а триггер 4 устанавливается в единичное состояние, разрешая работу делителя 7 частоты, В делитель 7 частоты заносится начальный коэффициент деления, и через соответствующий ему период t на выходе делителя 7 частоты вырабатывается первый импульс. Так как на первом входе (А) блока 6 сравнения кулевой код. а на втором входе (В) - ненулевой (число, равное количеству шагов), то на первом выходе (А г В) блока 6 сравнения сигнал О, на втором выходе (А « В) - 1, В результате импульс с выхода делителя 7 проходит через схему ИЛИ 8,1 на суммирующий вход счетчика 2 импуль- 5 сов. Этот .импульс поступает на вычитающий вход счетчика 5 импульсов, кроме того, делитель 7 частоты вновь начинает цикл деления частоты с периодом tp, Б результате содержимое счетчика 5 уменьшается на единицу, содержимое счетчика 2 увеличивается на единицу и становится равным О0.,,01, Этот код поступает на адресный вход
0
0
блока 3 памяти, через время выборки
на его выходе появляется код, соответствующий периоду tj. Делитель 7 частоты через время t формирует второй импульс, по которому содержимое счетчика 2 увеличивается, а счетчика 5 импульсов - уменьшается на единицу. Делитель 7 частоты начинает период деления t,, Таким образом, состояние счетчика импульсов 2 возрастает. Каждому из этих состояний соответствует коэффициент деления в блоке 3 памяти; задавая эти коэффициенты можно формировать кривую изменения частоты произвольным образом с произвольными дискретами изменения частоты (например, при 16-разрядном коэффициенте деления число дискретов составляет 65536),
При достия ении счетчиком 2 импульсов максимального состояния на его выходе переноса одновременно с оче- редным импульсом появляется импульс переноса (как правило инверсный), На выходе заема - 1 (этсЛ выход также инверсный), В результате через элемент И9 инверсный импульс с выхода переноса проходит на инверсный вход записи счетчика 2 импульсов. Так как информация (все единицы) с выхода счетчика 2 импульсов поступает на его информационный вход, то происходит подтверждение состояния счетчика 2 импульсов (т.е. он остается в максимальном состоянии, несмотря на поступление импульса на суммирующий вход). Этому состоянию счетчика 2 импульсов соответствует коэффициент деления в блоке 3 памяти, задающий .
максимальную частоту выходных импуль-15 мент сопротивления вращению ротора
сов (на фиг. 2 - импульсы с периодом t). С этого момента счетчик 2 импульсов перестает менять состояние и устройство пеоеходит из режима разгона в режим стационарного движения. Состояние счетчика 5 импульсов продолжает уменьшаться с каждым выходным импульсом.
20
электропривода при трогании с места имеет горб). Дополнительный шаг с уменьшенной чистотой облегчает пуск нагруженного привода, например, координатного стола.
Рассчитаем минимальный дискрет изменения частоты. Для частоты гене ратора 1 20 Мгц (максимальная .часто та для 155 серии) и максимальной ча 25 тоты выходных импульсов 15 КГц коэф фициент деления равен 1333. Для бли жайшего коэффициента, равного 1334, частота выходных импульсов равна 14992 Гц, дискрет равен 8 Гц,
такте, в котором состояние счетВ
чика 5 импульсов становится равным состоянию счетчика 2 импульсов, происходит смена состояний блока 6 сравнения: на первом выходе (АЬВ) через время сравнения tср появляется 1, на втором выходе (А Б) - О. Очередные импульсы с выхода делителя 7 с этого момента проходят через элемент ИЛИ 8.2 на вычитающий вход счетчика 2. С каждым тактом уменьшается содержимое не только счетчика 5, но и счетчика 2 импульсов. Начинается перебор таблицы коэффициентов в блоке 3 памяти в обратном порядке, в результате чего устройство переходит к режиму торможения. После того как счетчики 2 и 5 импульсов достигнут нулевого состояния, по импульсу с выхода делителя 7 частоты произойдет подтверждение нулевого состояния счетчике 2 импульсов (благодаря поступлению импульса заема через схему И9 на вход записи счетчика 2). Счетчик 5 импульсов также формирует импульс заема на соответствующем выходе, который сбросит в О триггер 4; сам счетчик 5 продолжает счет, перейдя в максимальное состояние (например 4095 для 12-разрядного счетчика 5).
Устройство остановится, перейдя в режим ожидания. В счетчике 2 импульсов будет нулевой код, в счетчике 5 - максимальный код, триггер 4 в нулевом состоянии. Таким образом.
для начала следующего цикла нет необходимости в сигнале начальной установке на входе 10.
На фиг, 2,3 в качестве примера приняты: число шагов 1000 (на вход 11 подается число, меньшее на единицу) , число шагов разгона 64 (счетчик 2-6-разрядный), Из диаграмм видно, что разгон имеет дополнительный (по сравнению с торможением) начальный шаг. Ему соответствует минимальная частота, требуемая на преодоление начального момента приемистости (мо0
0
электропривода при трогании с места имеет горб). Дополнительный шаг с уменьшенной чистотой облегчает пуск нагруженного привода, например, координатного стола.
Рассчитаем минимальный дискрет изменения частоты. Для частоты генератора 1 20 Мгц (максимальная .частота для 155 серии) и максимальной час- 5 тоты выходных импульсов 15 КГц коэффициент деления равен 1333. Для ближайшего коэффициента, равного 1334, частота выходных импульсов равна 14992 Гц, дискрет равен 8 Гц,
Таким образом, рассматриваемое устройство имеет возможность реализовать практически любую форму кривой разгона-торможения без существенного увеличения аппаратных затрат, позволяя провести разгон по оптимальной кривой. Оно самостоятельно oripe- деляет моменты смены режимов (разгон - стационар - торможение), не загружая ресурсов системы управления высшего уровня, Дополнительньй шаг с минимальной частотой в начале разгона облегчает пуск нагруженного привода. Возможность реализации экспо- менциальных кривых разгона позволяет уменьшить время обработки заданного . числа щагов. Устройство не критично к промежуточным состояниям на выходе блока 3 памяти в момент перехода от одного состояния к другому, т.к. достоверная информация успевает установиться задолго до конца такта (т.е. до того момента, когда она будет использоваться). Это упрощает наладку устройства и увеличивает надежность функционирования.
5
0
5
0
5
Ф.о рмула изобретения
Устройство для программного управления, содержащее генератор импульсов.
первый счетчик импульсов, блок памяти и триггер, информационный выход первого счетчика импульсов соединен . с адресным входом блока памяти, элемент И, выход которого подключен к входу записи первого счетчика импульсов, отличающееся тем, что, с цель увеличения надежности, упрощения наладки устройства,, в него введены второй счетчик импульсов, блок сравнения, делитель частоты и два элемента ИЛИ, выходы которых подключены соответственно к суммирую щему и вычитающему входам первого счетчика импульсов, выход генератора импульсов соединен с синхровходом делителя частоты, с выходом устройства, с первым входом первого и второго элементов ИЛИ и с вычитающим входом второго счетчика импульсов, информационный выход которого соединен с первым входом блока сравнения.
второй вход которого соединен с информационным выходом первого счетчика импульсов и с информационным входом первого счетчика импульсов, выходы переноса и заема которого соединены соответственно с первьм и вторым входами элемента И, вход начальной установки устройства соединен с входом обнуления первого счетчика импульсов и с первым входом обнуления триггера, выход которого соединен с разрешающим входом делителя импульсов и с выходом признака оконча- ния движения устройства, информационный вход которого соединен с информационным входом второго счетчика импульсов, выход заема которого подключен к второму входу обнуления триггера, вход установки в 1 которого соединен с входом запуска устройства и с входом записи второго счетчика импульсов,
«Ч|
Ю
«О
«5
4j «
ВНИИПИ Заказ 5565/47
Произв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
Тираж 863 Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1987 |
|
SU1550476A1 |
| Устройство для программного управления | 1986 |
|
SU1462246A1 |
| Устройство для программного управления | 1987 |
|
SU1434407A1 |
| Устройство для управления разгоном и торможением двигателя | 1983 |
|
SU1124252A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1374395A1 |
| Устройство управления шаговым двигателем | 1987 |
|
SU1539727A1 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1374182A1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| Многоканальное устройство программного управления шаговыми двигателями | 1985 |
|
SU1320794A1 |
| Устройство для преобразования цифрового кода скорости вращения шагового двигателя в частоту импульсов | 1986 |
|
SU1325413A1 |

Изобретение относится к автоматике и вычислительной технике и предназначено для использования в системах управления тяговыми приводами прецизионных координатных столов. Цель изобретения - увеличение надежности и упрощение наладки устройства. Устройство для программного управления содержит два счетчика импульсов, генератор импульсов, делитель частоты, блок памяти, триггер, элементы И, ИЛИ. Данное устройство позволяет реализовать практически любую форму кривой разгона - торможения без су- - щёственного увеличения аппаратных затрат, позволяя провести разгон по оптимальной кривой. Устройство некритично к промежуточным состояниям на выходе блока памяти в момент перехода от одного состояния к другому, т.к. достоверная информация успевает установиться задолго до конца такта. 3 ил. е € сл оо ел to 4: 05 кг
| Устройство для разгона и торможения исполнительного двигателя станка | 1973 |
|
SU506001A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для управления разгоном и торможением двигателя | 1983 |
|
SU1124252A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Приспособление для установки двигателя в топках с получающими возвратно-поступательное перемещение колосниками | 1917 |
|
SU1985A1 |
