ел ел
о
4Ь к
С&
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления шаговым двигателем | 1987 |
|
SU1539727A1 |
| Устройство для программного управления | 1987 |
|
SU1434407A1 |
| Устройство для программного управления | 1986 |
|
SU1462246A1 |
| Устройство для программного управления | 1986 |
|
SU1352462A1 |
| Устройство для формирования спектров с постоянным относительным разрешением по направлениям | 1984 |
|
SU1229775A1 |
| Устройство для программного управления | 1986 |
|
SU1397880A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1374395A1 |
| Устройство для контроля частоты | 1980 |
|
SU917113A1 |
| Устройство для реализации алгоритма быстрого преобразования фурье | 1973 |
|
SU480079A1 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1374182A1 |
Изобретение относится к автоматике и вычислительной технике и может использоваться для управления шаговыми приводами. Цель изобретения - сокращение объема памяти, увеличение функциональных возможностей, уменьшение трудоемкости создания и наладки устройства. Устройство формирует импульсную последовательность по информации, хранимой в блоке памяти 1. Эта информация представляет собой таблицу приращений коэффициентов деления частоты генератора 5. Коэффициенты рассчитываются с помощью арифметического блока (сумматора-вычитателя) 3 и накапливающего регистра 4. Устройство самостоятельно производит смену режимов движения. В зависимости от точки в таблице приращений, с которой начинается работа, и от частоты генератора формируются зависимости с различными параметрами. Это обеспечивает адаптацию устройства к величине нагрузки на исполнительный привод. 4 ил.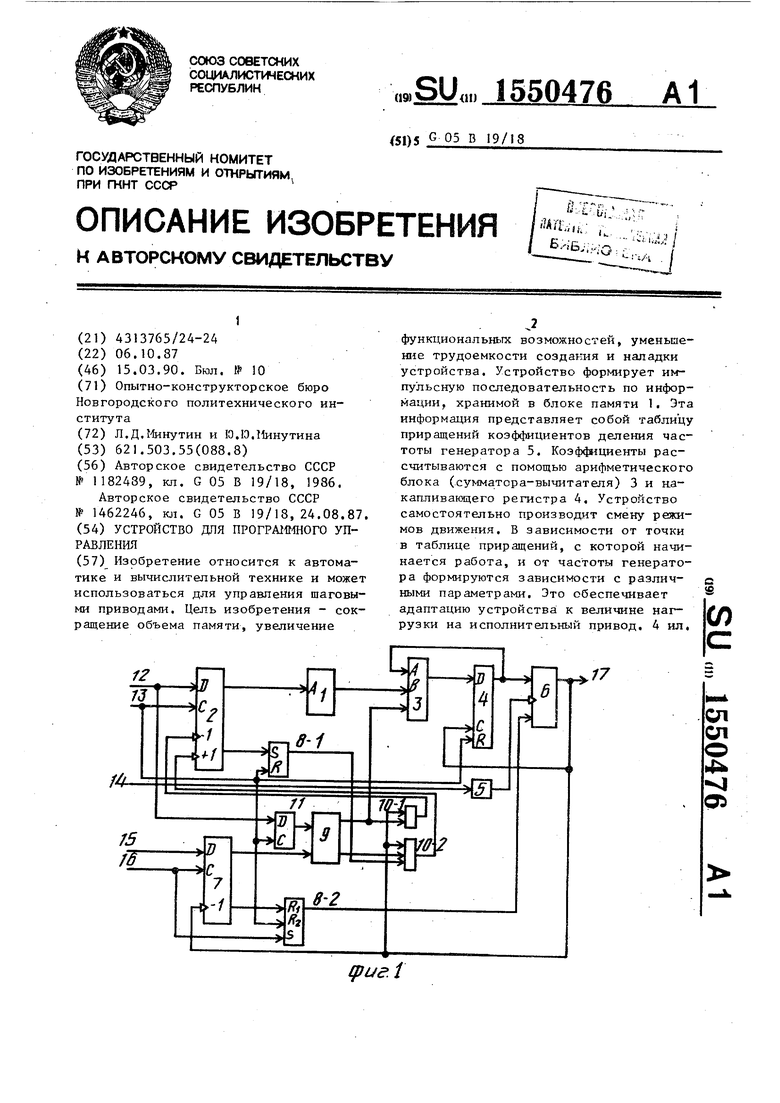
фиг
Изобретение относится к автоматике И вычислительной технике и предназначено для использования в системах управления шаговыми приводами прецизи- онных координатных столов.
Цель изобретения - сокращение объема памяти, расширение области применения за счет обеспечения почти неограниченного числа вариантов характе- ристик разгона в части крутизны (ус- |корения) и максимального значения 1частоты выходных импульсов, приводя- Ьее к улучшению динамики (быстродействия) привода, введения режима дотяж 15 тижении максимального состояния счетчика (фиг. 2б) формируется импульс переноса, который используется в качестве выходного импульса устройства. К этому моменту блок 3, находящийся в режиме суммирования, формирует коэффициент деления как сумму предыдущего значения коэффициента и приращения . По импульсу с выхода делителя 6 этот коэффициент записывается в регистр 4 и в следующем цикле будет принят делителем 6. Таким образом, происходит конвейерное формирование и передача значения коэффициента деления для делителя 6. Кроме того, импульс с выхода делителя 6 изменяет состояние счетчиков 2 и 7: содержимое счетчика числа шагов 7 уменьшается на единицу (блок 8, фиг.З), а содержимое счетчика 2 в режиме разгон уменьшается, в режиме торможение увеличивается на единицу, при достижении конца таблицы перестает менять свое состояние (стационарный скоростной режим). Для выбора типа изменения содержимого счетчика 2 проводится несколько проверок. Проверяется соотношение между числом, хранимым в регистре 11 (это стартовый адрес таблицы и одновременно число шагов, рас- дс ходуемых на торможение) и числом в счетчике 7 (текущее количество шагов, которое необходимо отработать приводу). Эту операцию выполняет схема сравнения 9 (блок 9, фиг. 3), Если второе число сравнялось с первым, то наступил момент перехода в режим
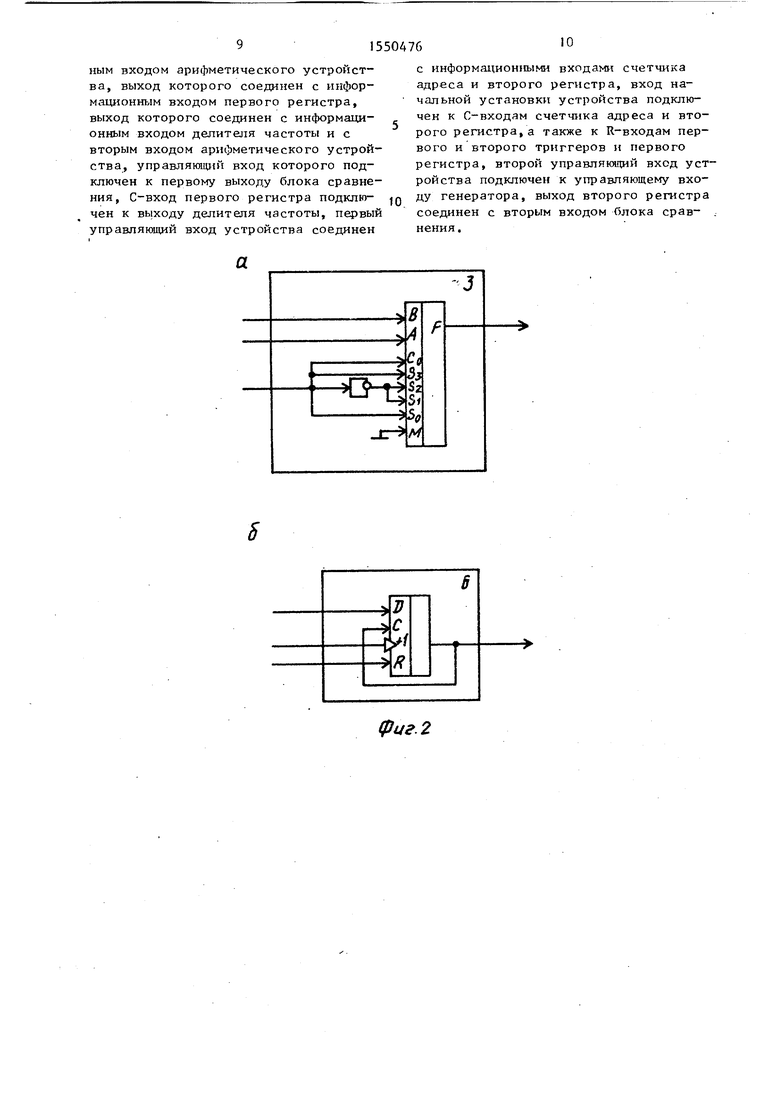
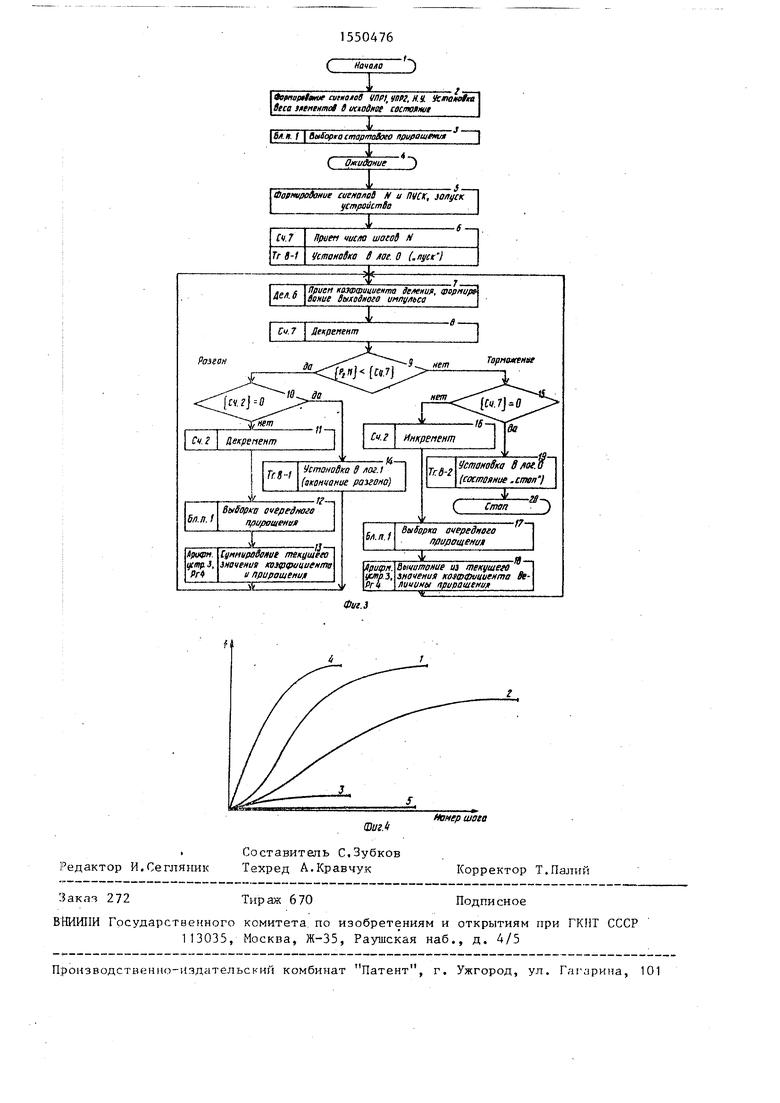
|ки, упрощение наладки устройства. I На фиг. 1 приведена функциональная схема устройства; на фиг. 2 - примеры реализации арифметического блока (а) и делителя (Ј); на фиг. 3 - алгоритм работы устройства; на фиг. 4 - примеры кривых разгона при различных управляющих сигналах.
Устройство содержит блок памяти 3, счетчик адреса 2, арифметический блок (сумматор-вычитатель) 3, регистр 4, генератор 5, делитель частоты 6, счетчик числа шагов 7, триггер РАЗГОН 8-1, триггер ПУСК , блок сравнения 9, элементы ИЛИ 10-1 и 10-2, регистр 11, первый вход управления УПР1 12, вход начальной установки НУ 13, второй вход управления УПР2 14, информационный вход N 15, вход запуска ПУСК 16, выход 17.
Устройство работает следующим образом (фиг. 1-3),
3 начале работы (блок 1 алгоритма на фиг. 3) на устройство подаются сигналы НУ, УПР1 и УПР2 (блок 2): устройство приводится в исходное состояние - в счетчик 2 и регистр 11 загружается стартовый адрес, триггер РАЗГОН 8-1 в О (состояние разгон), триггер ПУСК 8-2 в О (состояние стоп), регистр 11 в О. Логический О с выхода триггера ПУСК 8-2 запрещает делителю 6 выдачу импульсов на выход 17. Адрес стартового приращения после загрузки в счетчик 2 поступает на адресный вход блока памяти 1. В результате происходит выборка этого начального приращения (блок 3, фиг.З), Его код появляется на выходе блока памяти 1 и поступает на один из информационных входов блока 3. Устройство оказывается в исходном состоянии, в котором может находиться произвольное время (блок 4 , фиг.З). Для за
пуска устройства на его входы N 15 и ПУСК 16 подают соответственно число шагов отработки и импульс запуска (блок 5, фиг.З). В счетчик 7 загружается число N, триггер 8-2 устанавливается в 1, это означает, что устройство запущено (блок 6, фиг. 3). ) с триггера 8-2 разрешает работу делителю 6. Делитель 6 начинает цикл деления (для схемы, приведенной на фиг. 2б - цикл прямого счета) с нулевого состояния (до этого момента был активный сигнал на его обнуляющем входе). По достижении максимального состояния счет
чика (фиг. 2б) формируется импульс переноса, который используется в качестве выходного импульса устройства. К этому моменту блок 3, находящийся в режиме суммирования, формирует коэффициент деления как сумму предыдущего значения коэффициента и приращения . По импульсу с выхода делителя 6 этот коэффициент записывается в регистр 4 и в следующем цикле будет принят делителем 6. Таким образом, происходит конвейерное формирование и передача значения коэффициента деления для делителя 6. Кроме того, импульс с выхода делителя 6 изменяет состояние счетчиков 2 и 7: содержимое счетчика числа шагов 7 уменьшается на единицу (блок 8, фиг.З), а содержимое счетчика 2 в режиме разгон уменьшается, в режиме торможение увеличивается на единицу, при достижении конца таблицы перестает менять свое состояние (стационарный скоростной режим). Для выбора типа изменения содержимого счетчика 2 проводится несколько проверок. Проверяется соотношение между числом, хранимым в регистре 11 (это стартовый адрес таблицы и одновременно число шагов, рас- с ходуемых на торможение) и числом в счетчике 7 (текущее количество шагов, которое необходимо отработать приводу). Эту операцию выполняет схема сравнения 9 (блок 9, фиг. 3), Если второе число сравнялось с первым, то наступил момент перехода в режим
торможения. В противном случае
устройство должно либо остаться в режиме разгон (в который устройство устанавливается по сигналу НУ со входа НУ 13), либо перейти в стационарный скоростной режим (как указывалось, существует также режим дотяж- ки, который также является стациопарным, но при минимальной скорости). Условием перехода в скоростной стационарный режим является достижение конца таблицы, т.е. нулевой ячейки
блока памяти 1 (блок 10, фиг.З). Ес ли конец таблицы не достшнут, счетчик 2 уменьшает свое состояние на единицу (блок 11, фиг. 3). В результате происходит выборка очередного приращения в блоке памяти 1 (блок 12,
фиг. 3), суммирование его со значением предыдущего коэффициента с помощью арифметического блока 3 и регистра 4 (блок 13, фиг. 3). Полученный новый коэффициент принимается делителем (блок 7, фиг. 3), начинается новый цикл работы устройства. Если достигнут конец таблицы, т.е. счетчик 2 об- нулился, формируется сигнал заема, который устанавливает в 1 триггер 8-1 (блок 14, фиг. 3). Это означает, что разгон закончился. 1 с выхода триггера 8-1 запрещает прохождение импульсов через элемент ИЛИ 10-2 на вычитающий вход счетчика адреса 2. Счетчик перестает менять свое состояние, находясь в состоянии FF...F (одновременно с формированием сигнала заема счетчик переходит из нулевого состояния в состояние FF...F). Для того, чтобы привод перешел в стационарное движение, необходимо, чтобы в ячейке с адресом FF...F хранилось приращение, равное нулю. Устройство начнет формировать выходные импульсы с постоянной частотой, определяемой последним коэффициентом, рассчитанным по таблице приращений, т.е. последний коэффициент участка разгона является также коэффициентом стационарного скоростного режима.
Стационарный режим продолжится до момента достижения содержимого счетчика числа шагов 7 числа шагов, отводимых на торможение (это число хранится в регистре 11). 3 этом случае происходит смена активных состояний на выходах блока сравнения 9; 1 исчезает с первого выхода и появляется на втором. Этим открывается для прохождения импульсов элемент ИЛИ 10-1, подключенный к суммирующему входу счетчика 2. Начнется увеличение содержимого этого счетчика, т.е. просмотр таблицы приращений в обратном порядке (от состояния FF..,F через состояния 00...О, 00...1, 00...2 и т.д. до стартового состояния на
10
15
20
25
30
5
0
5
0
5
адресном входе блока памяти 1) (блок 16, фиг. 3). При этом выбранные ппи- ращения (блок 17 фиг. 3) будут вычитаться из текущих значений коэффициентов (блок 18 фиг. 3) в блок 3 н регистре 4, благодаря гмене управляющего сигнала нл соответствующем входе блока 3. Устройство начнет формировать кривую торможения. Этот режим будет продолжаться до обнуления счетчика числа шагов 7. Обнуление означает завершение отработки заданного извне числа шагов (блок 15 фиг. 3). Счетчик 7 формирует сигнал заема, который устанавливает в О триггер 8-2, запрещающий работу делителя 6 (блок 19 фиг. 3). Устройство перехо- - дит в состояние стоп (блок 20, фиг. 3).
Па фиг. 4 показаны примеры выходных характеристик устройства. Вся таблица приращений хранит данные, дающие 5-образный разгон. В этом случае старт замедленный, помогающий преодолеть встречающийся в ряде случаев повышенный момент сопротивления при трогании с места. Максимальные ускорения приходятся на среднюю часть характеристики. Это обеспечивает минимум временных затрат для выхода на максимальные скорости (повышается быстродействие). В завершающей части характеристики в области максимальных скоростей ускорения плавно уменьшаются до нуля (предотвращается опасность пропуска шагов и срыва вращения). На фиг. 4 такая кривая обозначена цифрой 1 . Если с помощью сигналов на входе УПР2 14 уменьшить частоту генератора 5, принять старт с самого начала таблицы (со старших адресов блока памяти 1), то кривая будет иметь тот же характер, но в целом все ускорения будут снижены и снизится максимальная скорость (кривая 2). Это позволит разгонять привод при повышенной нагрузке. Если начать формировать характеристику с последней трети таблицы, получится очень пологая кривая с минимальными ускорениями (3). Этот закон может использоваться при значительных сопротивлениях приводу, например, при механической обработке. При холостых проходах ненагруженного привода или при совпадении направления сил на привод и его движения (например, сила тяжести при движении вниз) может применяться ускоренный
рйзгон (4). В нем можно исключить на- ч; льную часть таблицы (т.е. начальный и:1гиб S-образной кривой), подав стартовый адрес, приходящийся на начало наиболее крутого участка, на вход YIlPl 12 и „од но времени о увеличив частоту генератора 5, чтобы не уменьшились величина максимальной скорости. В случаях, когда невозможно перед на- чг|лом движения точно определить число
Шс
.гов, можно сначала отработать с згоном и торможением приближенное
число шагов, а затем запустить Устройство с минимальной неизменяющейся скоростью, контролируя положение при- на каждом шаге (режим дотяжки1, 5). Во всех случаях возможна остановка устройства по сигналу на НУ 13, обеспечивая механическую целостность привода при возникновении аварийной ситуации.
Проведем оценку уменьшения объема памяти 1. Определим разрядность
коэффициента. Примем частоту г е- 25 сравнения, два триггера, два элеменне)ратора 5 равной 20 МГц (максимальная частота для 155 серии), максимальная частота выходных импульсов - IS КГц (двигатель ДШИ-200). В области высоких скоростей дискрет изменения частоты двигателя (минимальный) 10 Гц. Кр:оме повышения надежности в части пропуска шагов и срыва вращения, та- кг1я величина дискрета обеспечивает возможность формировать любую кривую с точностью лучше 0,1%. С учетом то- гО, что стартовый момент имеет максимальную величину при частоте 50 - 100 Гц, получаем максимальный коэффициент, равный 20 МГц/100 Гц 200000. Такое число размещается в 13-разряд- най сетке. 18 разрядов обеспечивают и минимальный дискрет меньше, чем в 10 Гц. Для 512 шагов разгона (размерта ИЛИ, делитель частоты, выход которого подключен к входу счетчика числа шагов и к первым входам первого и второго элементов ИЛИ, а также к вы30 ХОДУ устройства, выход счетчика адреса соединен с входом блока памяти, а выход заема счетчика адреса соединен с S-входом первого триггера, выход которого соединен с вторым входом первого элемента ИЛИ, первый выход блока сравнения соединен с вторым входом второго злеменча ИЛИ, а второй выход соединен с третьим входом первого элемента ИЛИ, выходы элементов
4Q ИЛИ соединены соответственно с суммирующим и вычитающим входами счетчика адреса, информационный вход устройства подключен к информационному входу счетчика числа шагов, вход запуска
35
ности таблицы) в прототипе потребует- устройства соединен с С-входами счется 512 18 - разрядных слов или 9216 бит. Теперь определим разрядность максимального приращения. Максимальный дискрет частоты при самом быстром р.азгоне не превышает 150 Гц. Например, для средней части кривой для последовательных частот 5000 Гц и 5150 Гц коэффициенты равны соответственно 4000 и 3880. Разница составляет 120. Это число размещается в 7- рлзряжной сетке. Объем памяти устройства будет составлять 512«7-разрядных слов или 3584 бита. Объем уменьшился примерно в 2,5 раза,
50
55
чика числа шагов и второго триггера, выход которого соединен с разрешающим входом делителя частоты, счетннй вход которого подключен к выходу генератора, выход счетчика числа шагов соединен с первым входом блока сравнения, а выход заема - с первым R-входом второго триггера, отличающееся тем, что, с целью сокращения объема памяти, расширения области применения и упрощения наладки устройства, введены арифметический блок и два регистра, причем выход блока памяти соединен с первым информацией
Таким образом, в предлагаемом устройстве существенно уменьшены затраты памяти. Создание и настройка устройства стали менее трудоемкими (уменьшились затраты на программирование, отладки требует только одна кривая). При одной таблице в памяти устройство может формировать почти неограниченное с практической точки зрения число вариантов характеристик разгона. Это обеспечивает широкие адаптационные возможности устройства, приводя к улучшению динамики привода при всех вариантах нагрузки. Введение дополнительного режима дотяжки позволяет использовать устройство в замкнутых контурах управления в режиме реального времени.
Формула из-обретения
Устройство для программного управления, содержащее блок памяти, счетчик адреса, счетчик числа шагов, блок
та ИЛИ, делитель частоты, выход которого подключен к входу счетчика числа шагов и к первым входам первого и второго элементов ИЛИ, а также к вы0 ХОДУ устройства, выход счетчика адреса соединен с входом блока памяти, а выход заема счетчика адреса соединен с S-входом первого триггера, выход которого соединен с вторым входом первого элемента ИЛИ, первый выход блока сравнения соединен с вторым входом второго злеменча ИЛИ, а второй выход соединен с третьим входом первого элемента ИЛИ, выходы элементов
Q ИЛИ соединены соответственно с суммирующим и вычитающим входами счетчика адреса, информационный вход устройства подключен к информационному входу счетчика числа шагов, вход запуска
5
0
5
чика числа шагов и второго триггера, выход которого соединен с разрешающим входом делителя частоты, счетннй вход которого подключен к выходу генератора, выход счетчика числа шагов соединен с первым входом блока сравнения, а выход заема - с первым R-входом второго триггера, отличающееся тем, что, с целью сокращения объема памяти, расширения области применения и упрощения наладки устройства, введены арифметический блок и два регистра, причем выход блока памяти соединен с первым информациейным входом арифметического устройства, выход которого соединен с информационным входом первого регистра, выход которого соединен с информационным входом делителя частоты и с вторым входом арифметического устройства, управляющий вход которого подключен к первому выходу блока сравнения, С-вход первого регистра подключен к выходу делителя частоты, первый управляющий вход устройства соединен
с информационными входами счетчика адреса и второго регистра, вход начальной установки устройства подключен к С-входам счетчика адреса и второго регистра,а также к R-входам первого и второго триггеров и первого регистра, второй управляющий вход устройства подключен к управляющему входу генератора, выход второго регистра соединен с вторим входом блока сравнения .
Фиг. 2
1550476 ( Начало )
«Wroprfatwf aitnaiat иЩУПРг.Н.У. K/nawfra веса тенента 8 исюдиое састяти
iw/ra I
Т
бл я I быЈоргастарта&ко яриращпяа
i1
( Ожийониг
Г
uofHupoSoHtif еиегюла N и Шк, запуск I ycmpaticmlo I
i
&ел.&
Приен коэффициента Целения, форнц/ Йвние Выходного импу/пси
Розеин
ГгЙ-1
Устомав ко в /юг. I
&
Выборка очередного приращения
Т
п
fyfiHvpoSe/iue текущего
значения тирфициентв
а приращении
:зЈ
iStn
/п
wfra
iw/ra I
ь
tputpif. &ip3, РГ$
Вычито/ше из текушего значения кйаюфиииеита яииамы приращения
Н
| Устройство для разгона и торможения двигателя исполнительного механизма | 1984 |
|
SU1182489A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для программного управления | 1986 |
|
SU1462246A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
