15
20
-25
Изобретение относится к системам гфограм ного управления и предназначено для разгона, замедления и точной остановки прецизионного координатного стола, приводимого в движение шаговым электрическим двигателем. Цель изобретершя - улучшение дина- мичерки : характеристик привода и удешевление устройства,IQ
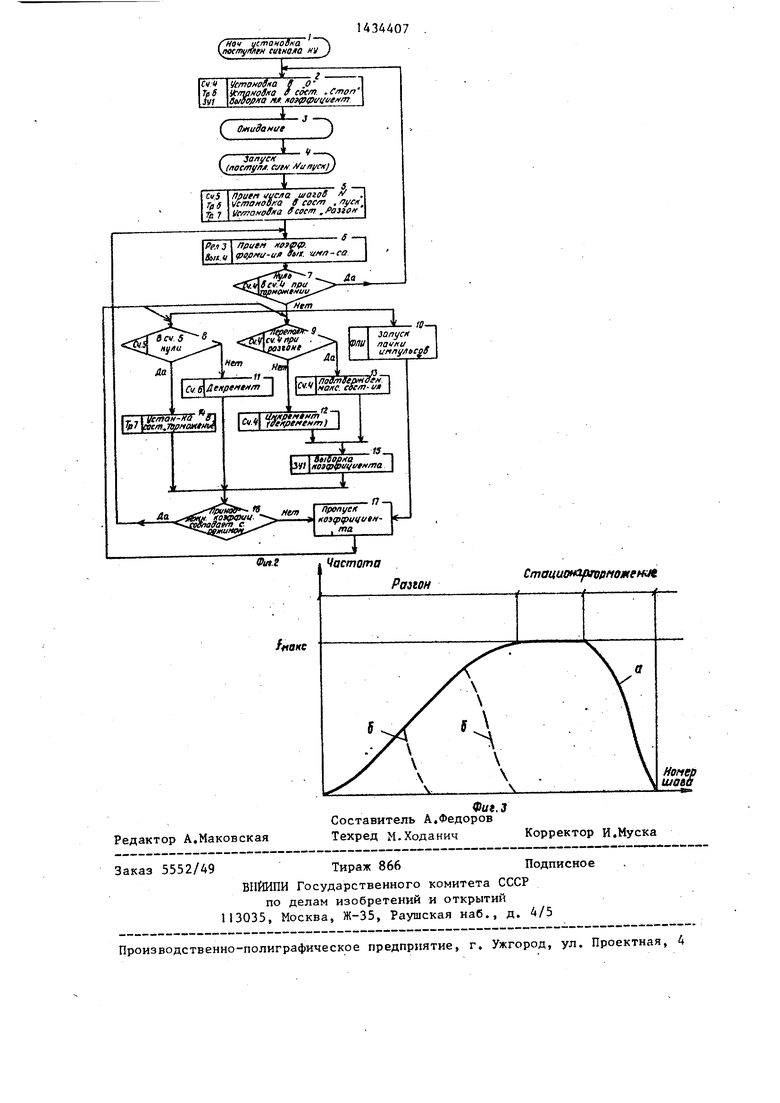
На фиг, представлена функциональная схема описьгеаемого устройства; на фиг 2 - алгоритм его работы на фигв 3 пример характеристик разгона и торможения.
Устройство содержит блок памяти j генератор 2 импульсов, делитель 3 частоты, первый счетчик 4 импульсов, второй счетчик 5 импульсовj два триггера б и 7, два элемента 2И-2ИЛИ 8-1 и 8-2, инвертор 9, формирователь 10 пачки импульсов, информационный вход 11 устройства (N), вход 12 запуска устройства (Пуск), вход 13 начальной установки (НУ), выход 14 уст ройства (Выхо), элемент И IS,
Формы кривых разгона и торможения задаются таблицами коэффициентов деления частоты генератора 2 импульсов, которые хранятся в блоке I памяти. зО Адрес коэффициента в блоке 1 памяти задается счетчиком 4 и myльcoв, С гет- чик 5 импульсов п эинимает с входа J число шагов N, которое необходшю отработать-устройству, В процессе работы счетчик 5 импульсов хранит число, равное N - (п р п-,-), где. Пр, п - текущие числа пройденных шагов разгона и пропущенных шагов из таблицы торможения. Обнуление счетчика 5 импульсов идентифицирует начало режима торможения В режиме разгона счетчик 4 импульсов перебирает в реш-ше прямого счета таблицу коэффициентов торможения, пропуская коэффициенты торможения, В режиме торможения счетчик 4 импульсов перебирает в режиме обратного счета таблицу коэффициентов торможения, пропус- кая уже коэффициенты разгона. Чтобы обеспечить пропуск коэф(1)ициентов, устройство содержит формирователь 10 пачки импульсов, который формирует несколько импульсов на повьшенной частоте, обеспечивающих быстрый инкремент (декремент) счётчика 4. Число импульсов в пачке определяется максимальным количеством следующих подряд одноименных коэффициентов
35
4а
45
50
55
15
0
5
IQ
О
35
а
45
0
5
Устройство работает следующим образом.
Управление устройством осуществляется с трех внешних входов: информационного входа П, входа 12 запуска, входа 13 начальной установки. После включения питания на вход 13 подается сигнал начальной установки НУ, по которому происходит установка в нулевое состояние триггера б, обнуляется счетчик 4 импульсов и в блоке 1 памяти происходит выборка младшего коэффициента s принадлежащего таблице разгона. Устройство переходит в состояние ожидания, в котором может находиться произвольное время. Запуск устройства осуществляется подачей сигналов N и Пуск на входы 11 и 12 соответственно. По этим сигналам в счетчик 5 импульсов записывается число шагов отработки (N)5 триггер 6 устанавливается 3 единичное состояние (состояние Пуск), триггер 7 - также в единичное состояние (состояние Разгон), Цикл отработки N шагов начинается с приема в делитель 3 частоты младшего коэффициента деления частоты генератора 2 импульсов. Через интервал времени, пропорциональньтй этому коэффициенту, делитель 3 частоты формирует импульс на выход 14 устройства. Дальнейшая работа устройства зависит от нескольких условий,
Если в счетчике 4 импульсов не нулевое состояние при режиме Торможение, то происходит проверка условий 8 и 9, а также исполнение блока 10 (фиг,2), В результате проверок 8 и 9 происходит шение на единицу состояния счетчика 5 импульсов и увеличение на единицу состояния счетчика 4 импульсов. Изменение содержимого счетчиков 4 и 5 обеспечивается прохождением импульса с выхода делителя 3 частоты через открытое первое плечо элемента 2И-2ИЛИ 8-}в При этом бит признака коэффициента для первого коэффициента, принадлежащего таблице разгона, кодируется логическим нулем. Кроме того, импульс.с выхода делителя 3 частоты запускает формирователь 10 пачки импульсов, которьй готовится к выдаче первого импульса пачки,После увеличения содержимого счетчика 4 импульсов происходит выборка второго коэффициента в блоке 1 памяти, В случае принадлежности данного ко
эффидиента к таблице торможения ка выходе бита признака блока 1 памяти появляется логическая единица,которая открывает второе плечо элемента 2И-2ИЛИ 8-1. Импульс с выхода формирователя 10 пачки импульсов через второе плечо элемента 2И-2ИЛИ 8-1 проходит на суммирующий вход счетчика 4 и начинается выборка третьего коэффициента „ Если он также принадлежит таблице тормокения, то будет пропущен аналогично предыдущему коэффициенту по второму лмпульсу из пачки, формируемой форьтрователем 10 пачки импульсов, и так далее до тех пор, пока не будет выбран из блока 1 па-, мяти коэффициент разгона, бит признака которого равен логическому нулю Этот уровень логического нуля закрывает второе плечо элемента 2И-2ИЛИ 8-1 для прохождения оставшихся импульсов из пачки, формируемой формирователем 10 пачки импульсов. В этом случае счетчик 4 импульсов перестает менять свое состояние и второй коэффициент из таблицы разгона остается на выходной шине блока 1 памяти до момента формирования следующего импульса на выходе делителя 3 частоты
При достижении счетчиком 4 импульсов максимального состояния на его выходе переноса формируется сигнал (как правило, инверсный), который,, пройдя через элемент И 15, приводит к записи в счетчик 4 импульсов его собственного состояния, С этого момента на выходе блока I памяти до тех пор, пока не наступит торйожение,находится старший коэффициент, задающий максимальную частоту следования выходных импульсов в стационарном режиме.
Стационарный ретким продолжается до тех пор, пока в счетчике 5 импульсов не окажется нулевое состояние. При этом на его выходе переноса формируется сигнал, который обнуляет триггер 7, устанавливая его в состояние Торможение.
В этом режиме состояние счетчика 4 уменьшается либо по импульсам с выхода делителя 3 частоты, либо по импульсам, формируемым формирователем 10 пачки импульсов при пропуске коэффициентов таблицы разгона. В первом случае декремент счетчика 4 обеспечивается прохождением импульсов с выхода делителя 3 частоты че,
рез открытое первое плечо элемента 2H-2vinH 8-2 на вычитающий вход счетчика 4, во втором случае импульсы из пачки, формируемой формирователем 10 пачки импульсов, проходят через второе плечо элемента 2И-2ИЛИ , которое открывается сигналом логического нуля с выхода признака Q блока 1 памяти, проинвертированного инвертором 9.
Уменьшение сос тояния счетчика 4 импульсов продолжается до достижения нулевого состояния. На выходе 5 заема счетчика 4 в этот момент формируется импульс, который сбрасывает триггер 6 в нулевое состояние (Стоп), а также проходит через элемент И I5 и записывает нулевое 0 состояние в счетчик 4 импульсов
(подтверждает его нулевое состояние), Устройство переходит в состояние ожидания. При этом для начала нового цикла отработки не требуется сиг- 5 нала НУ, так как счетчик 4 импульса и триггеры 6 и 7 находятся в исходном состоянии.
На фиг. 3 представлен пример характеристики разгона - торможения 0 для большего числа шагов (кривая а, устройство достигает стационарного режима) и для малого числа шагов (кривые б, устройство из состояния Разгон сразу переходит в состояние Торможение). Для обоих случаев реализуется несимметричньй закон, являющийся оптимальным для любого привода .
Устройство дает возможность фор- jQ мировать независимые одна от другой кривые разгона и торможения, позволяя выбирать оптимальные с точки зрения динамических характеристик законы отдельно для разгона и тормо- 5 жения. Обеспечена возможность перехода к торможению в произвольный момент времени, так как устройство самостоятельно определяет точку входа в кривую торможения, не загружая ре- Q сурсы управляющей системы верхнего уровня и упрощая алгоритм управления,
Формула изобретения
gg Устройство для программного управления, содержащее генератор импульсов , первый и второй счетчики импульсов, блок памяти, делитель частоты, первый триггер, элемент И, выход пер5
вого счетчика импульсов соединен с его информационным входом и входом блока памяти, первый выход которого соединен с информационным входом делителя частот, -выход которого является выходом устройства, выходы переноса и заема первого счетчика импульсов соединены соответственно с первым и вторым входами элемента И, выход которого соединен с синхровхо- дом первого счетчика импульсов,выход первого триггера соединен с разрешающим входом делителя частоты синх ровход которого соединен с выходом генератора импульсов, о т л и ji а ю- щ в е с я тем, что, с целью улучшения динамических характеристик привода и удешевления устройства, в нег
5
элементов 2И-2ИЛИ. выходы которых соединены соответственно с входами прямого и обратного счета первого счетчика импульсов, выход заема которого соединен с первым входом первого триггера, второй вход которого соединен с входом обнуления перваго счетчика импульсов и входом начальной установки устройства, информационный вход которого соединен с информационным входом второго счетчика импульсов, выход заема которого соединен с входом обнуления второго триггера, вход запуска устройства соединен с синхровкодом второго счетчика импульсов и входами установки в 1 первого и второго триггеров, прямой и инверсный выходы второго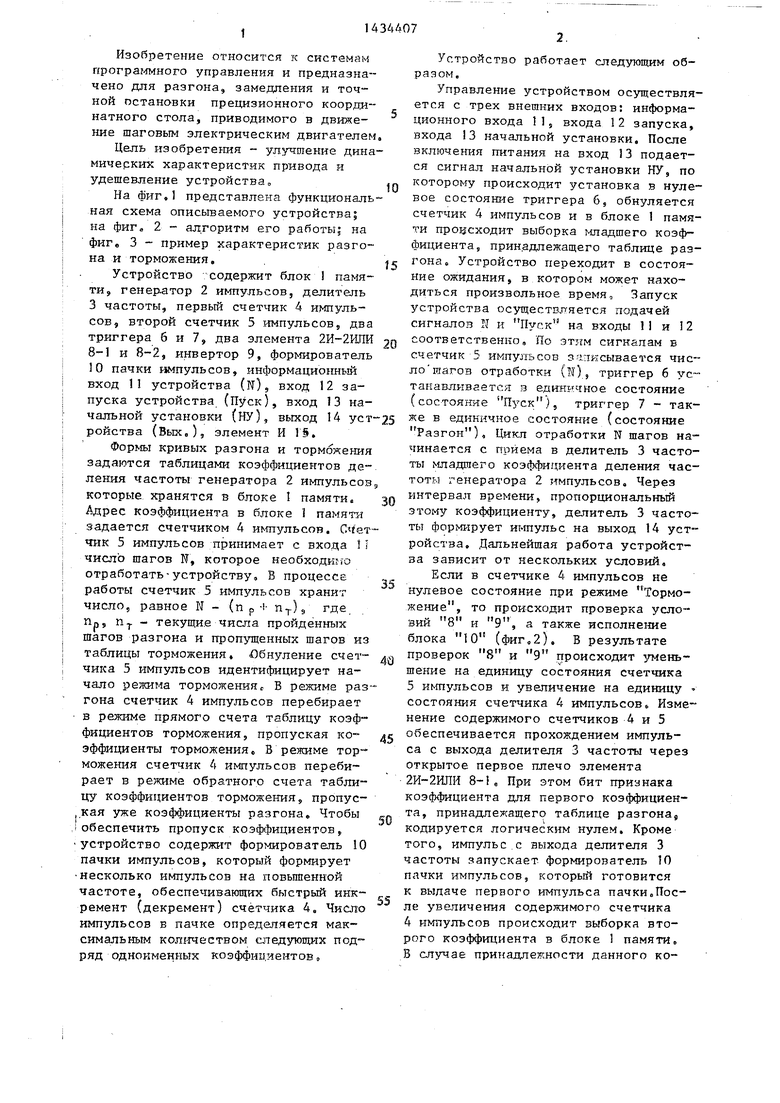

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1986 |
|
SU1462246A1 |
| Устройство для программного управления | 1987 |
|
SU1550476A1 |
| Устройство для программного управления | 1986 |
|
SU1352462A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ СЛОЖНЫХ СИГНАЛОВ | 1988 |
|
SU1841042A1 |
| Устройство для динамической балансировки роторов | 1984 |
|
SU1173214A1 |
| Устройство для измерения девиации частоты линейно-частотно-модулированного колебания | 1989 |
|
SU1711087A1 |
| Устройство управления шаговым двигателем | 1987 |
|
SU1539727A1 |
| Устройство для измерения средней длительности временных интервалов | 1987 |
|
SU1506433A1 |
| Устройство для измерения среднеквадратического значения сигнала | 1989 |
|
SU1728808A1 |
| Измеритель текущего значения радиуса рулона | 1980 |
|
SU883649A1 |
Изобретение относится к системам программного управления и предназначено для разгона, замедления и точной остановки прецизионного координатного стола, приводимого в движение шаговым злектрическим двигателем. N 11 Пусн J НУ Цель изобретения - улучшение динаьт- ческих характеристик привода и уде- шевление устройства. Устройство программного управления содержит блок 1 памяти,, генератор 2 импульсов, делитель 3 частоты, формирователь 10 пачки импульсов, первый счетчик 4 импульсов, второй счетчик 5 импульсов, два триггера 6, 7, два элемента 2И-2ИЛИ 8-1 и 8-2, элемент И 15, инвертор 9. Данное устройство имеет возможность формировать независимые друг от друга кривые разгона и торможения, позволяя выбирать оптимальные с точки зрения динамических характеристик законы отдельно для разгона и для торможения. Обеспечена возможность перехода к торможению в произвольный момент времени. 3 ил. 6WXO Q СО ijiii О 
введены второй триггер, формирователь 20 триггера соединены с вторыми входа1 Ж
пачки импульсов, первый и второй элементы 2И-2ШШ и инвертор, причем выход делителя частоты соединен с певыми входами первого и второго элементов 2И-2ИЛИ и входом запуска формирователя пачки импульсов, сннхро- вход которого соединен с выходом генератора импульсов, а выход формирователя пачки импульсов соединен с третьими входами первого и второго
соответственно первого и второго элементов 2Й-2ИЛИ, выход первого элемента 2И-2ИПИ соединен с входом обратного счета второго счетчика импульсов, второй выход блока памяти соединен с четвертым входом первого элемента 2И-2ИЛИ и входом инвертора, выход которого соединен с четвертым входом второго элемента 2И-2ИЛИ,
4e
ICV fipeiM/n I
ra и I Павтгер/маг/ГЛ . cScm-ия
It
If 2,1 Uft ififUMm , -v 1Л1 ененгп) 1
k,,. 1 лчеврк, 41 иИУфУ1(
ма iif
пропуск KOiifitpuvueM- . та
-
0ia.Z
J
Частота
fflOHC
к, У1(
15
ма iifutHoia
уск puvueM- а
G -
Стационсл згорнометл
Номер шойа
| Устройство для разгона и торможения исполнительного двигателя станка | 1973 |
|
SU506001A1 |
| Устройство для программного управления | 1986 |
|
SU1352462A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
