Изобретение относится к машиностроению, а именно к устройствам для замены инструмента на кисти промышленного робота.
Целью изобретения является упрощение конструкции и повьш1ение надежности стыковки.
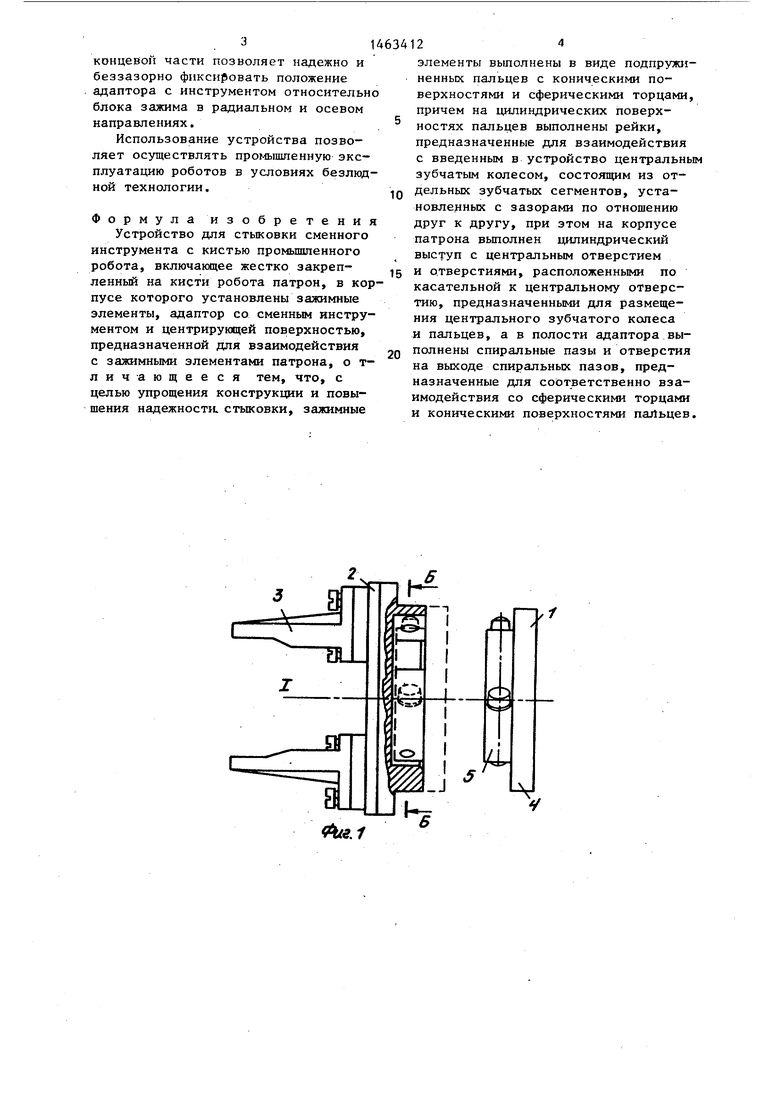
На фиг.1 показано устройство, общий на фиг,2 - адаптор; на фиг.З - вид А на фиг.2, на фиг.4 - разрез Б-Б на фиг.1 в состыкованном состоянии.
Устройство состоит из зажимного патрона 1, крторьй крепится жестко к кисти промьшшенного робота, и сменного адаптора 2 для крепления на нем сменного инструмента 3.
Зажимной патрон 1 содержит цилиндрический корпус 4 с цилиндрическим центрирующим выступом 5, имеющим базовую центрирующую поверхность 6 и три цилиндрических отверстия 7, оси которых, находясь в плоскости, перпендикулярной центральной оси патрона по касательной к центральному отверстию 8, составляют симметрично расположенный равносторонний тре угольник (многоугольник) . Палыц 1 8, находящиеся в отверстиях 7, поджаты пружинами 10 и выступают своими коническими хвостовиками 11 и сферическими торцами 12 за пределы базовой поверхности 6 выступа 5 на одинаковьй размер. На пальцах 9 выполнены рейки 13, зацепляющиеся с. центральным зубчатым разрезньй колесом 14, СОСТОЯ1ЦИМ из трех зубчатых сегментов 15, установленных с зазорами 16. Колесо 14 вращается на не- по движной втулке 17, В выступе 5 корпуса 4 патрона установлены упоры 18, которые входят в продольные пазы 19, выполненные на пальцах 9, ограничивающие ход пальцев в осевом направлении. Адаптор представляет собой корпус 20 с базовым торцом 21 и центрирующей поверхностью 22. В корпусе 20 адаптора 2 вьшолнены открытые спиральные пазы 23 с выходом в базовую центрирунщую поверхность 2
Для замыкания конических хвостовиков 11 с адаптором 2 выполнены отверстия 24, расположенные на выходе спиральных пазов 23.
Устройство работает следукнргм образом.
При движении руки ротора с зажимным патроном 1 вдоль центральной оси
0
5
0
5
0
5
0
5
0
5
I-I навстречу адаптеру 2 центрирующая поверхность 22 скользит по выступу 5, палыщ 9, выступающие за выступ 5, свободно без касания входят .в спиральные пазы 23 корпуса 20 адаптора до упора базового торца 21 адаптора 2 в корпус 4 патрона. Далее рука робота поворачивает зажимной патрон вокруг центральной оси I-I на заданньй угол, при этом пальцы 9, скользя по спиралевидной поверхности пазов 23 сферическими торцами 12, утапливаются в отверстиях 7 выступа 5, в конце поворота конические хвостовики 11 пальцев 9 входят в отверстия 24 корпуса адаптора 2,фиксируя взаимное положение блока зажима и адаптора 2 в осевом и радиальном направлениях.
Дпя расфиксации устройства рука . робота движением вдоль оси одного из пальцев 9 нажимает посредством внешнего воздействия сквозь отверстие 24 в корпусе 20 адаптора на сферический торец 12 одного из пальцев 9, передавая вращательное движение через рейки 13 зубчатому разрезному колесу 14.
Отдельные зубчатые сегменты 15 зубчатого колеса 14 последовательно передают движение внутрь выступа 5 остальным пальцам 9, утапливая их за пределы отверстий 24 корпуса 20 адаптора. Поворотом в обратную сторону вокруг оси I-I кисть робота вьшодит пальцы 9 из зоны замыкания в исходное положение, и ходом вдоль оси I-I расстыковываются патрон 1 с адаптором 2. Зазоры 16 обеспечивают независимость перемещения каждого пальца 9.
Имея несложную конструкцию, малое количество деталей, небольшие габариты и массу, предлагаемое устройство позволяет автоматически менять сменные инструменты руки робота, выполнякнцие различные функции, расширяя технологические возможности робота.
Вследствие з меньшения габаритов конструкции, отсутствия магистралей для подвода среды к исполнительным элементам расширяется зона, обслуживаемая роботом, упрощается, а следовательно, становится более надежной системы управления роботом.
Независимость хода каждого из зажимных пальцев и коническая форма их
314634
концевой части позволяет надежно и беззазорно фиксировать положение адаптора с инструментом относительно блока зажима в радиальном и осевом направлениях.5
Использование устройства позволяет осуществлять промышленную эксплуатацию роботов в условиях безлкщ- ной технологии.
10
Формула изобретения
Устройство для стыковки сменного инструмента с кистью промьштенного робота, включающее жестко закреп- ленньй на кисти робота патрон, в корпусе которого установлены зажимные элементы, адаптор со сменным инструментом и центрирующей поверхностью, предназначенной для взаимодействия с зажимными элементами патрона, о т- личающее ся тем, что, с целью упрощения конструкции и повы- щения надежности, стыковки, зажимные
5
0
5
0
124
элементы выполнены в виде подпрутки- ненных пальцев с коническими поверхностями и сферическими торцами, причем на цилиндрических поверхностях пальцев выполнены рейки, предназначенные для взаимодействия с введенным в устройство центральным зубчатым колесом, состоящим из отдельных зубчатых сегментов, уста- новлерных с зазорами по отношению друг к другу, при этом на корпусе патрона вьшолнен цилиндрический выступ с центральным отверстием и отверстиями, расположенными по касательной к центральному отверстию, предназначенными для размещения центрального зубчатого колеса и пальцев, а в полости адаптора выполнены спиральные пазы и отверстия на выходе спиральных пазов, предназначенные для соответственно взаимодействия со сферическими торцами и коническими поверхностями паЛьцев.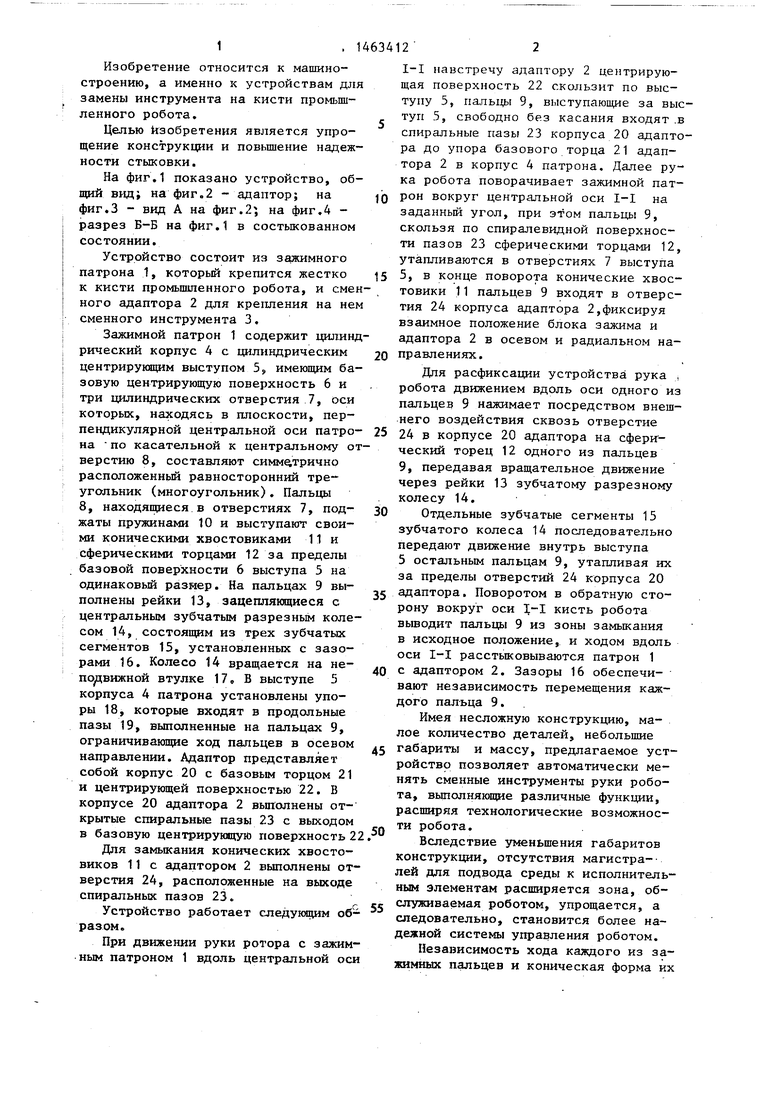
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОКАРНЫЙ ПЛАВАЮЩИЙ ПАТРОН | 2010 |
|
RU2449862C2 |
| СПОСОБ УСТАНОВКИ ЗАГОТОВОК ДЕТАЛЕЙ ТИПА ДИСКОВ | 2010 |
|
RU2443513C1 |
| Устройство для стыковки сменного инструмента с кистью промышленного робота | 1985 |
|
SU1507563A1 |
| Устройство для крепления держателя инструмента в шпинделе металлорежущего станка | 1988 |
|
SU1736331A3 |
| Автоматическая револьверная головка | 1990 |
|
SU1776493A1 |
| Патрон для закрепления конических шестерен | 1973 |
|
SU506470A1 |
| Многопозиционное зажимное устройство | 1981 |
|
SU975305A1 |
| Токарный самоцентрирующий патрон | 1981 |
|
SU1017438A1 |
| САМОЦЕНТРИРУЮЩИЙ КУЛАЧКОВЫЙ ПАТРОН | 2001 |
|
RU2215618C2 |
| Патрон | 1982 |
|
SU1046033A1 |
Изобретение относится к области машиностроения, а более конкретно к устройствам для замены инструмента на кисти промьшшенного робота. Целью изобретения является упрощение конструкции и повышение надеж- - кости стыковки. Устройство состоит из патрона 1, жестко закрепленного на кисти робота, и адаптора 2 со сменным инструментом. В корпусе патрона расположены пальцы 9, свяff f 1 г} 14 а ю занные с зубчатым колееом 14, состоящим из сегментов 15, установленных с зазорами 16 по отношению друг к другу. В полости .адаптора 2 выполнены спиральные пазы 23 и отверст тия 24. Робот вводит выступ 6 патрона 1 в центрирукщую поверхность 22адаптора, а затем поворачивает патрон 1 на заданньй угол. Пальцы 9 своими торцами 12 скользят по пазам 23и утапливаются в отверстиях 7. В конце поворота пальцы 9 под действием пружин 10 входят своими концами 1 1 в отверстия 24 адаптора 2, надежно фиксируя последний на корпусе патрона. Расфиксация происходит путем воздействия робота на торец 12 одного из пальцев 9. Благодаря введению составного зубчатого колеса 14 обеспечивается некоторое независимое перемещение пальцев 9, что позволяет надежно и беззазорно фиксировать адаптор 2 на корпусе патрона 1. 4 ил. я « а (/) С и гч 17 72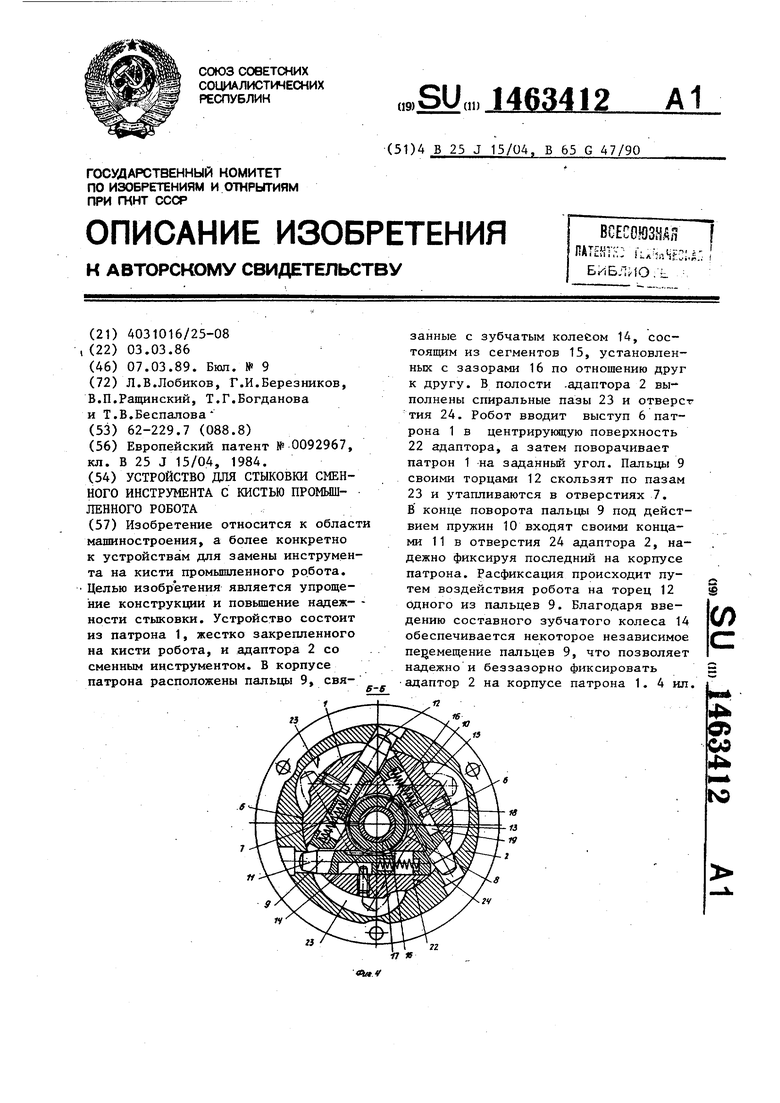
Йгг/
«f./
Bu&
/У
Фие.З
| Способ изготовления крупнопористого (беспесчаного) бетона | 1950 |
|
SU92967A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
