Изобретение относится к приводам печатной маддины, имеющей средства для регулирования прюдольного перемещения ленточного материала.
Известен привод печатной машины со средствами для регулирования продольного перемещения ленточного материала, содержащий блок управления со следящим устройством, включающим фотоэлектрические датчики, контролирующие положение меток на запечатывающем материале, и с исполнительным механизмом, который имеет печатные и формные цилиндры печатных секций, рубящие и фальцевальные цилиндры фальцеваль илх секций, а также лентоведущие цилиндры, кинематически связанные разветвленной механической системой с многофазным электроприводом jj
Недостатком известного привода печатной машины является невысокая точность регулирования.
Цель изобретения - повышение точности регулирования.
Поставленная цель достигается тем, приводе печатной машины со средствами дл,я регулирования продольного перемещения ленточного мате риала, содержащем блок управления
со следящим устройством, включающим фотоэлектрические датчики, контролируницие положение меток на запечатывающем материале, и с исполнительным механизмом, который имеет печатные и формные цилиндры печатных секций, рубяпше и фальцевальные цилиндры фальцевальных секций, а также лентоведущие цилиндры, кинематически
10 связанные разветвленной механической системой с многофазным электроприводом, следящее устройство содержит датчики угла поворота и скорости, кинематически соединенные с форм15ными, фальцевальными и лентоведущи- i ми цилиндрами, а также датчики натяжения запечатываемой ленты, уста новленные перед каждой печатной и фальцевальной секциями, а блок уп20равления имеет генератор, фазосдвигги ющую цепь, узел усилителей и узлы преобразования фазы, каждый из которых содержит фазосдвигатель, сумматор и усилитель мощности, при этом первый
25 выход генератора через последовательно соединенные фазосдвигающую цепь и узел усилителей соединен с входами датчиков угла и скорости поворота и фальцевальных цилиндров,
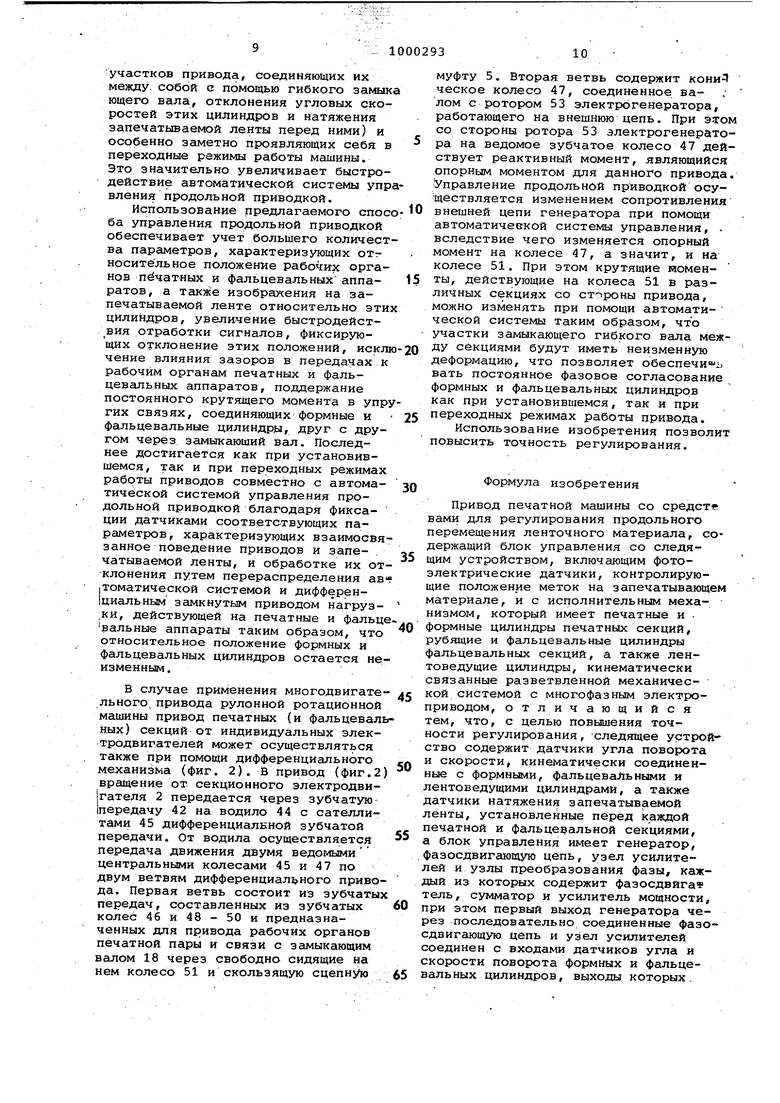
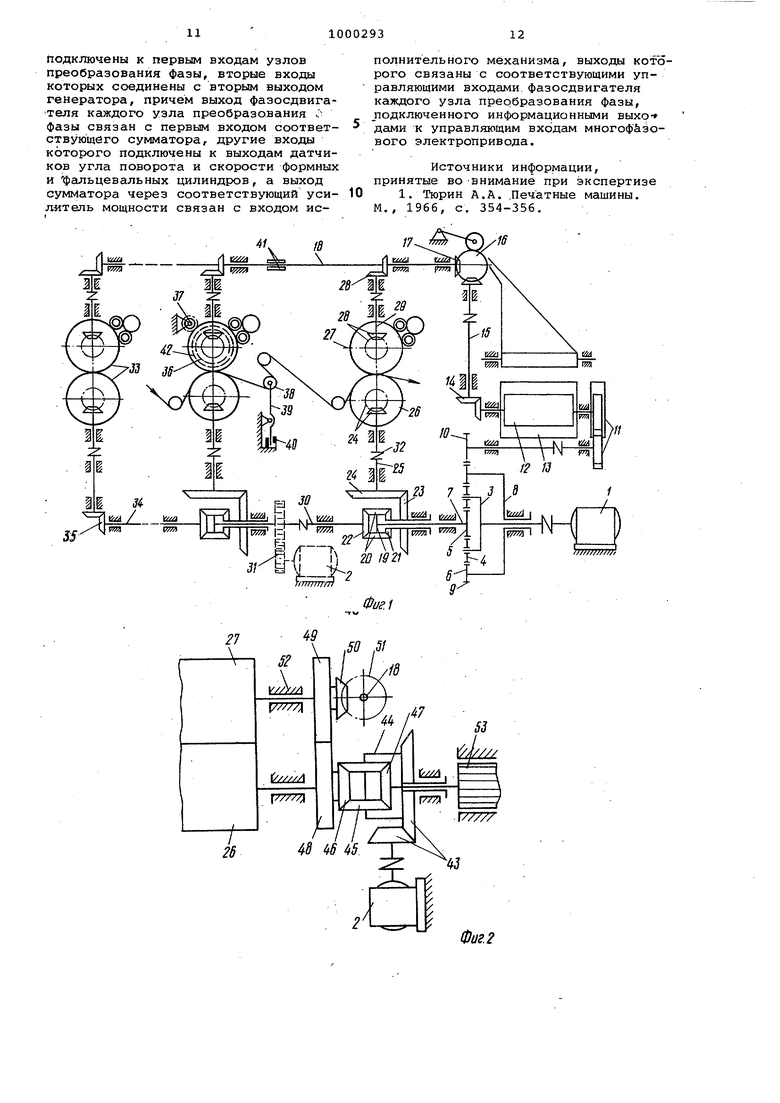
30 |Выхода которых подключены к первым входам узлов преобразования фазы, вторые входы которых соединены с вто рым выходом генератора, причем выход фазосдвигателя каждого узла преобразования фазы связан с первым, входом соответствующего cyivjMaTopa, другие входы которого подключены к выходам датчиков угла поворота и скорости формных и фальцевальных цилиндров , а выход сумматора через со(бтветствующий усилитель мощности связан с входом исполнительного механизма, выходы которого связаны с соответствующими управляющими входами фазосдвигателя каждого узла преобразования фазы, подключенного информационными выходами к управляющим входам многофазного электропривод а. На фиг. 1 показано устройство, ос ществляющее привод печатных и фальце вальных аппаратов в многосёкционных рулонных печатных машинах, а также содержащее датчики угла поворота вала и скоростей формных и вальцевальных цилиндров, усилий натяжений запечатываемой ленты, на фиг, 2 вариант выполнения привода печатных секций в случае многодвигательного привода машины; на фиг. 3 - возможно расположение датчиков угла поворота вала и скорости формного (фальцеваль ного) цилиндра и исполнительного устройства для осуществления поворота этого цилиндра; на фиг. 4 - принципиальная схема автоматической системы управления продольной приводкой . Привод печатной машины со средствами для регулирования продольного перемещения листового материала содержит исполнительный механизм (фиг. 1), который состоит из приводного электродвигателя 1 или нескольких секционных (на фиг. 1 пунктиром показано подключение одного из них, например электродвигателя 2, к приводу). Вал электродвигателя 1 соединен с водилом 3 дифференциальной передачи, несущим сателлиты 4, Которые зацепляются с центральными ве домыми зубчатыми колесами 5 и 6, закрепленными соответственно на валу 7 и корпусе 8. На этом корпусе закре пено также зубчатое колесо 9, связанное через шестерню 10 и зубчатые передачи 11 с рубящим 12 и фальцевальным 13 цилиндрами, а затем, чере зубчатые передачи 14 и вал 15 с лен товедущим цилиндром 16. Последний также через коническую зубчатую передачу 17 связан с замыкающим валом 18. Вал 7 является ведущим во второй дифференциальной зубчатой передаче, связывающей первую и вторую печатные секции. На этом валу закреплено водило 19 с сателлитами 20, связанными с ведомыми центральными коническими зубчатыми колесами 21 и 22. Колесо 21 жестко связано с коническим зубчатым колесом 23, а через конические зубчатые колеса 24 и вал 25 с печатным цилиндром 26, работающим в паре с формным цилиндром 27. Связь между этими цилиндрами выполнена в виде зацепления цилиндрических зубчатых колес, закрепленных на валах этих цилиндров. Формный цилиндр через коническую зубчатую передачу 28 и вал 29 также связан с замыкающим валом 18. Зубчатое колесо 22 жестко закреплено на валу 30, являющемся ведущим в дифференциальной зубчатой передаче, связывающей вторую и, например, третью печатные секции. Связь второй печат ной секции с замыкающим валом выполнена аналогично связи с ним первой печатной секции. Второй секционный электродвигатель 2 (в случае выполнения привода многодвигательным J связан с приводом через зубчатую передачу 31 с валом 30. Позицией 32 обозна.чены соединенные муфты. Привод последней печатной секции 33осуществляется от ведомого вала 34предыдущей дифференциальной передачи через простую коническую зубчатую передачу 35. Устройство содержит также дат-, чик 36 угла поворота вала формного цилиндра (индуктосин }, датчик 37 скорости этого цилиндра. Они связаны непосредственно с валами этих цилиндров-, В устройстве имеется также датчик натяжения запечатываемой ленты, состоящей из бумагонаправляющего валика 38, закрепленного на рычагах 39, свободно качающихся на оси и установленных между упорами, на од|Ном из которых закреплен пьезоэлек трический датчик 40 давления. Для |измерения крутящего момента, передаJBaeMoro участком замыкающего вала 18, между печатными или печатной и фальцевальной секциями на нем быть размещен датчик 41 крутящего момента. На валу формного цилиндра также закреплена подвижная часть электромагнитной порошковой муфты 42. В случае применения многодвигательного привода многосекционных рулонных печатных машин связь между секционными электродвигателями и пе чатной (аналогично и фальцевальной) секцией может осуществляться через дифференциальную зубчатую передачу (фиг. 2). Привод печатной секции (фиг. 27 содержит секционный электродвигатель 2, связанный через зубчатую передачу 43 с водилом 44, несущим сателиты 45, вьтолненные в виде конических зубчатых колес. Сателлиты 45 осуществляют привод двух ведомых централбных конических зубчатых колес 46 и 47. Коническое зубчатое ко лесо 46 жестко связано с цилиндрическим колесом 48, закрепленным на валу печатного цилиндра 26, а колесо 47 закреплено на одном валу с цилиндрическим зубчатым колесом. 49. Колесо 48 находится в зацеплеНИИ с колесом 49, осуществляя кинематическую связь между печатными 26 и формными 27 цилиндрами. С цилин;а1рическим зубчатым колесом 49 жестко связано коническое колесо 50 передающее вращение колесу 51, свободно сидящему на замыкающем валу 1 и связанному с ним при помощи сколь зящей сцепной муфты 52. Замыкающий вал является связующим для всех сек ций. Ведомое центральное колесо 47 связано при помощи вала с ротором 53 С формным цилиндром связаны датч ки 36 угла поворота вала и 37 скоро |ТИ .этого цилиндра, а также электро(магнитная муфта 42--и механические элементы 53 и 54, участвующие в передаче перемещения (фиг. З). Блок 5 управления СФиг. 4), связанный с ис полнительным механизмом, имеет гене ратор 56, фазрсдвигающую цепь 57, узел усилителей, содержащий усилите ли 58 и 59 статора., статорные обмот ки 60 индуктосина 36 (фиг. 1 и З). При этом создается вращающееся магни ное поле, Статорные обмотки жестко связаны со станиной машины, а рот орные - с валами формных и фальцевальных цилиндров или с самими цилиндрами. Блок управления также имеет узлы преобразования фазы, каждый из которых содержит фазосдвигатель, включаю щий в себя усилитель 61 ротора, фазо вращатель 62 и фазочувствйтельный выпрямитель 63. Также каждый из узлов преобразования фазы имеет сумматор 64 и усилитель 65-мощности, при этом первый выход генератора 56 через последовательно соединенные фазосдвигающую цепь 57 -и узел усилителей соединен с входами обмоток многофазового электропривода, выходы которого подключены к первым входам узлов преобразования фазы, вторые входы которых соединены с вторым выходом генератора 56, причем выход фазосдвигателя каждого узла преобразования фазы связана с первым входом соответствующего сумматора 64, вторые входы которого подключены к выходам датчиков 16 и 18 угла поворо та-вала, а его выход через соответствующий усилитель 65 мощности связан с соответствующим входом узла электромагнитных муфт многофазового электропривода, выходы которого связаны с соответствующими управляющими входами фазосдвигателя каждого узла преобразования фазы, подключенного информационными выходами к управляющим входам многофазового электропривода. Выходное напряжение выпрямителя 63 в виде сигнала ДЧ, пропорционального углу поворота первого цилиндра, вместе с преобразованными сигналами от других датчиков, например, для первого цилиндра: АР. - от датчика натяжения запечатываемой ленты перед первым цилиндром, - от датчика скорости (например, тахогенератора) первого цилиндра,. - от фотоэлектрических датчиков, следящих за контрольными метками на запечатываемой ленте, ДФ2.- от фазочувствительного выпрямителя в цепочке управления положением второго цилиндра - являются входом сумматора 64. Сигнал, полученный на выходе после прохождения усилителя 65, является входом исполнительного устройства - электромагнитного тормоза, выполненного в виде электромагнитной порошковой муфты 42, неподвижная часть которой закреплена на станине машины. Подвижная часть муфты, закрепленная на валу формного или фальцевального цилиндра, связана с ротором фазовращателя 62, который может быть выполнен совмещенным с индуктосином (эти связи-между указанными элементами отражены на фиг. 4 двойными линиями. Назначение индуктосинов 60 в данной схеме измерение с- высокой точностью угла поворота формных и фальцевальных цилиндров относительно неподвижной системы отчета - станины машины с целью определения с помощью данной системы управления относительного (фазового) положения формных и фальцевальных цилиндров. Назначение электромагнитных тормозов 42 - осуществление регулирования угла закручивания упругой системы (валопроводов), соединяющей формные и фальцевальные цилиндры между собой с помощью гибкого замыкающего вала. После включения устройство работает следующим образом. Вращение вала электродвигателя 1 при помощи водила 3 с сателлитами 4 передается на две ведомые шестерни 5 и 6, связанные соответственно с ведомым валом 7 и корпусом 8. Вращение корпуса через шестерни 9 и 10 и зубчатую передачу 11 передается рубящему 12 и фальцевальному 13 цилиндрам фальцевального аппарата. Вместе с этими цилиндрами к передаче могут быть подключены также и тянущие валики (не показаны Через коническую зубчатую передачу 14 и вал 15 аращение от фальцилиндра передается ентоведущему цилиндру 16, связанном при помощи конической зубчатой передачи 17 с замыкающим валом 18. Ведомый вал.7 первой рассматриваемой дифференциальной зубчатой передачи является ведущим для второй дифференциальной зубчатой передачи, обеспечивающей привод первой печатной секции и ведущего вала третьей дифференциальной зубчатой передачи, в свою очередь осуществляющей передачу движения, например, второй печатной секции и ведущему валу четвертой дифференциальной зубчатой передачи и т.д. Водило 19 через конические зубча тые сателлиты 20 передает вращение ведомым центральным зубчатым колесам 21 и 22. Движение от колеса 21 передается жестко связанному с ним коническому зубчатому-колесу 23 а далее через конические зубчатые колеса 24 и вал 25 печатному цилинд ру 26. В паре с последним вращается формный цилиндр 27.- Он кинематически связан с.печатным цилиндром при помощи цилиндрической зубчатой передачи. Далее формный цилиндр 27 при Помощи конических зубчатых коле 28 и вала 29 соединен с замыкающим валом 18. Подключение других.секций к приводу аналогично описанным выше. В случае приведения данного прив да для -машин крупного формата нео.бходима для разгрузки привода передача движения не от одного, а от нескольких электродвигателей. Подсо единение таких секционных электродвигателей, например, 2 осуществляется к ведущему валу дифференциальной передачи через шестерни 31. Подсоединение секций печатных и фальцевальных к приводу производит ся через муфты 32, позволяющие осуществлять комбинирование количества участвующих в работе секций. При отключении какой-либо секции управляемая связь между оставшимися секциями может осуществляться, например, путем жесткого закрепления сателлитов на соответствующем водил или использования сцепной муфты меж ду водилом и валом ведомого центрального колеса дифференциешьной пе редачи отключаемой секции, сообщающего движение.следующей секции (не показаны). Применение дифференциальных передач для привода печатных и фаль цевальных секций с гибким замыкающи валом позволяет регулировать, относи тельное положение рабочих органов указанных секций (формных и фальцевальных цилиндров) за счет регулиру ,мой крутильной деформации упругих связей между ними, т.е. соответствующих участков замыкающего вала. Эта деформация осуществляется, например, за сч.ет создания тормозного момента на валу формного цилиндра электромагнитной муфтой 42 {фиг. 1 и 3). Величина тормозного момента определяется автоматической системой регулирования продольной приводки (.фиг. 4). В этой автоматической системе сигналы, получаемые (и преобразуемые) от датчиков 36 угла поворота формных и фальцевальных цилиндров (индуктосинов)-дЧ, от датчиков 37 их угловой скорости (тахогенераторовКу, от датчиков 40 натяжения запечатываемой ленты (пьезоэлектрических датчиков давления) AF а также .от фотоэлектрических датчиков, .фиксирующих положение контрольных меток на запечатываемой ленте, складываются на сумматоре 64 (фиг. 4) и преобразуются в управляющие воздействие напряжение питания катушки электромагнитной муфты 42. I В результате действия тормозного момента со стороны электромагнитных муфт на соответствующие формные и фальцевальные цилиндры происходит перераспределение крутящих моментов в упругих связях, соединяющих эти цилиндры через замыкающий вал, а знач:ит, и их крутильной деформации, в результате чего изменяется их относительное положение. Таким образом осуществляется регулировка продольной приводки. Во втором варианте построения автоматической системы управленияпродольной приводкой сигналы, поступающие на сумматор 64 /от датчиков угла поворота формных и -фальцевальных цилиндров (индуктосинов) urV и их угловой скорости , заменяются сигналом Лм, поступающим от датчика 41 крутящего момента, закрепленного на упругой связи (например, на участке замыкающего вала), соединяющей секции машины. Таким образом, в данной системе продольной приводки управляющее воздействие на исполнительные органы - электромагнитные тормоза вырабатывается не только за счет уч.ета отклонения в совмещении красок в многокрасочных оттисках (хотя этот фактор является определяющим), как в существующих способах приводки, но и за счет учета различных возмущений, действующих на рабочие органы печатных и фальцевальных аппаратов и запечатываемую ленту (фазовые рассогласования формных или формных и фальцевальных цилиндров друг относительно друга вследствие различных деформаций упругих участков привода, соединяющих их между, собой с помо1аью гибкого замык ющего вала, отклонения угловых скоростей этих цилиндров и натяжения запечатываемой ленты перед ними) и особенно заметно проявляющих себя в переходные режимы работы машины. Это значительно увеличивает быстродействие автоматической системы упр вления продольной приводкой. Использование предлагаемого спос ба управления продольной приводкой обеспечивает учет большего количест ва параметров, характеризующих относительное положение рабочих органов печатных и фальцевальных аппаратов, а также изображения на запечатываемой ленте относительно зти цилиндров, увеличение быстродейст вия отработки сигналов, фиксирующих отклонение этих положений, искл чение влияния зазоров в передачах к рабочим органам печатных и фальцевальных аппаратов, поддержание постоянного крутящего момента в упр гих связях, соединяющих формные и фальцевальные цилиндры, друг с другом через замыкаюший вал. Последнее достигается как при установившемся, так и при переходных режимах работы приводов совместно с автоматической системой управления продольной приводкой благодаря фиксации датчиками соответствующих параметров, характеризующих взаимосвя занное поведение приводов и запе- . чатываемой ленты, и обработке их от клонения путем перераспределения ав тематической системой и дифференциальным замкнутым приводом нагруз ки, действующей на печатные и фальц вальные аппараты таким образом, что относительное положение формных и фальцевальных цилиндров остается не изменным. В случае применения многодвигате льного. привода рулонной ротационной машины привод печатных (и фальцевал ных) секций от индивидуальных электродвигателей может осуществляться также при помощи дифференциального механизма (фиг. 2). В привод (фиг.2 вращение от секционного электродви.гателя 2 передается через зубчатую передачу 42 на водило 44 с сателлитами 45 дифференциальной зубчатой передачи. От водила осуществляется передача движения двумя ведомыми центральными колесами 45 и 47 по двум ветвям дифференциального приво да. Первая ветвь состоит из зубчаты передач, составленных из зубчатых колес 46 и 48 - 50 и предназначенных для привода рабочих органов печатной пары и связи с замыкающим валом 18 через свободно сидящие на нем колесо 51 и скользящую сцепную муфту 5. Вторая ветвь содержит кони ческое колесо 47, соединенное валом с ротором 53 электрогенератора, работающего на внешнюю цепь. При этом со стороны ротора 53 электрогенератора на ведомое зубчатое колесо 47 действует реактивный момент, являющийся опорным моментом для данного привода. Управление продольной приводкой осуществляется изменением сопротивления внешней цепи генератора при помощи автоматичеккой системы управления, . вследствие чего изменяется опорный момент на колесе 47, а значит, и на колесе 51. При этом крутящие моменты, действующие на колеса 51 в различных секциях со стороны привода, можно изменять при помощи автоматической системы таким образом, что участки замыкающего гибкого вала между секциями будут иметь неизменную деформацию, что позволяет обеспечить вать постоянное фазовое согласование формных и фальцевальных цилиндров как при установившемся, так и при переходных режимах работы привода. Использование изобретения позволит повысить точность регулирования. Формула изобретения Привод печатной машины со средств вами для регулирования продольного перемещения ленточного материала, содержащий блок управления со следящим устройством, включающим фотоэлектрические датчики, контролирующие положение меток на запечатывающем материале, и с исполнительным механизмом, который имеет печатные и формные цилиндры печатных секций, рубящие и фальцевальные цилиндры фальцевальных секций, а также лентоведущие цилиндры, кинематически связанные разветвленной механической системой с многофазным электроприводом, отличающийся тем, что, с целью повышения точности регулирования, следящее устрой ство содержит датчики угла поворота и скорости, кинематически соединенные с формными, фальцевальными и лентоведущими цилиндрами, а также датчики натяжения запечатываемой ленты, установленные перед каждой печатной и фальцевальной секциями, а блок управления имеет генератор, фазосдвигающую цепь, узел усилителей и узлы преобразования фазы, каждый из которых содержит фазосдвйга тель, сумматор и усилитель мощности, при этом первый выход генератора через последовательно соединенные фазосдвигающую цепь и узел усилителей соединен с входами датчиков угла и скорости поворота формных и фальцеваль ных цилиндров, выходы которых,
подключены к первым входам узлов преобразования фазы, вторые входы которых соединены с вторым выходом генератора, причём выход фазосдвига теля каждого узла преобразования о фазы связан с первым входом соответствующего сумматора, другие входы которого подключены к выходам датчиков угла поворота и скорости формных и фальцевальных цилиндров, а выход сумматора через соответствующий усилитель мощности связан с входом исj/-4{r i пТПТЛТГП
полнительного механизма, выходы которого связаны с соответствующими управляющими входами, фазосдвигателя каждого узла преобразования фазы, подключенного информационными выхо- дами к управляющим вх6дс1м многоф&эового электропривода.
Источники информации, принятые во-внимание при экспертизе
1. Тюрин А.А. .Печатные машины. М., 1966, с. 354-356, Г Фие.1 И ) 7T 777777T77i

/ / / / /
