Изобретение относится к области управления многодвигательными электроприводами с несколькими источниками питания электродвигателей, при- меняемыми в механизмах передвижения мощных роторных экскаваторов, состоящих из нескольких холовьк тележек, связанных с общей конструкцией экскаватора.
Целью изобретения является повы- щение надежности работы привода пу- тем изменения схемы управления многодвигательным электроприводом механизма передвижения роторного экска- .ватора в зависимости от режима нагрузки,
На чертеже изображена функциональная схема описываемого устройства.
Рабочий механизм 1 соединен с прводными электродвигатепями 2, получающими питание от индивидуальных управляемых источников 3 питания, в качестве которых могут использо- ваться тиристорные преобразователи, генераторы и т.п. К управляющим входам тиристорных преобразователей присоединены выходы регуляторов 4 тока, на входы которых присоединены выходы датчиков 5 тока и регуляторов 6 частоты вращения. Три входа регуляторов 6 частоты вращения присоединены соответственно к выходам датчиков 7 частоты вращения, выходу задатчика 8 скорости и к выходам регуляторов 9 выравнивания нагрузки через управляемые ключи 10. Входы управляемьгх ключей 10 соединены с выходами блока 11 управления ключа- ми, вход которого соединен с выходо блока 12 вьцГеления максимального сигнсша, входы которого, в свою очередь, соединены с датчиками 5 тока электродвигателей 2„
Устройство работает следующим образом.
В режиме движения экскаватора по относительно ровной местности на выходе задатчика 8 скорости и1-1еется сигнал заданной величины скЬрости, который поступает на входы регуляторов 6 частоты вращения. Регуляторы 6 частоты вращения, воздействуя через регуляторы 4 тока и источники 3.питания на электродвигатели 2, обеспечивают поддержание заданной скорости движения экскаватора. При этом каждый из трех электроприводов
0
5
0
5 о д г
5
0
5
передв1скения работает независимо, нагрузка их определяется конкретными условиями движения тележек экскаватора и находится в допустимых пределах рабочей нагрузки электродвигателей.
При перегрузке электропривода одной из тележек во время движения экскаватора ток нагрузки электродвигателей 2 этой тележки возрастает. Сигнал с выхода датчика 5 тока пере- ГРУЗИВЩ1-ПССЯ электродвигателей 2 вьщеляется блоком 12 выделения максимального сигнала и поступает на вход блока 11 управления ключами. По достижении этим сигналом величины уставки включения блок 11 управления ключами срабатывает и включа- , ет управляемые ключи 10, которые подключают выходы регуляторов 9 выравнивания нагрузки к входам регуляторов 6 частоты вращения. Регуляторы 9 выравнивания нагрузки, воздействуя на рег уляторы 6 частоты вращения, обеспечивают выравнивание нагрузки между электродвигателями 2 по кольцевой схеме выравнивания.
При возникновении перегрузки одного из электроприводов благодаря ; работе схемы выравнивания создаются такие условия работы электроприводов, при которых стопорение перегруженного электропривода не происходит, и экскаватор преодолевает возникшее препятствие.
Действие регуляторов 9 вьгравнива- ния нагрузки продолжается до того момента, пока ток якоря самых нагруженных электродвигателей 2 не станет меньще уставки отключения. Блок 11 управления ключами отключает управляемые ключи 10, прекращая функционирование схемы выравнивания нагрузок.
Таким образ-ом, данное устройство позволяет увеличить срок службы электродвигателей, снизить аварийные простои, повысить надежность электрооборудования и производительность, так как сокращается время перемещения эксксяватора.
Блок вьщеления максимального сигнала, блок управления ключами и ключи могут быть реализованы на базе релейно-контакторной аппаратуры или бесконтактных логических элементов, а также, на базе программно-логических устройств.
Предлагаемое устройство может быть реатшзовано на элементах, серийно выпускаемых электропромышленностью, и предполагается к применению для приводов роторных экскаваторов производства ПО Ждановтяжмаш.
Формула изобретения
Устройство для управления многодвигательным электроприводом механизма передвижения роторного экскаватора, состоящее из нескольких групп приводов, каждая из которых содержит регулятор выравнивания нагрузок, регуляторы тока и частоты вращения, датчики тока и частоты вращения, электродвигатели, управляемые тирис- торным преобразователем, цепь управления которого связана с выходом регулятора тока, к первому входу которого подключен регулятор частоты вращения, а к второму входу.подключен датчик тока, соединенный с первым входом регулятора выравнивания
нагрузки, датчик частоты вращения соединен с первым входом регулятора частоты вращения, задатчик частоты
с вращения соединен с вторыми входами регуляторов частоты вращения каждой группы, причем первый вход регулятора выравнивания нагрузки предшествующей группы соединен с вторым вхо-
0 дом регулятора выравнивания нагрузки последующей группы, отличающееся тем, что, с целью повышения надежности механизма передвижения при нагрузках, в него ввеj дены блок вьщеления максимального
сигнала, блок управления ключами и .. S каждую группу электроприводов введены управляемые ключи, причем датчик тока каждой группы соединен с
0 соответствующим входом блока вьщеления максимального сигнала, выход которого подключен к входу блока управления ключами, а соответствующий выход блока управления ключами со5 единен с управляющим входом управляемого ключа каждой группы.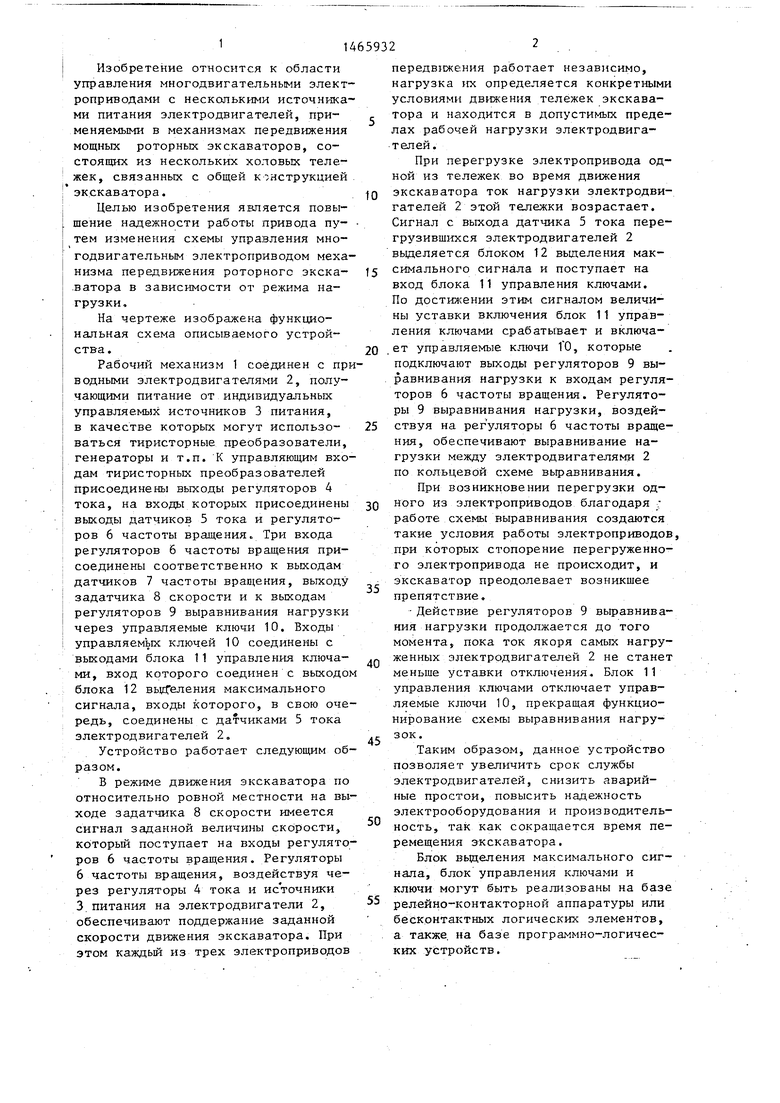
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| Устройство для управления частотно-регулируемым многодвигательным электроприводом | 1984 |
|
SU1252906A1 |
| Устройство управления процессом выбора зазоров в многодвигательных электроприводах поворотных механизмов экскаваторов | 1981 |
|
SU1015053A1 |
| Многодвигательный электропривод | 1980 |
|
SU983961A1 |
| Многодвигательный электропривод | 1983 |
|
SU1115192A1 |
| Многодвигательный частотно-регулируемый электропривод | 1988 |
|
SU1598256A1 |
| Устройство для управления частотно-регулируемым многодвигательным электроприводом | 1982 |
|
SU1064415A1 |
| Многодвигательный электропривод постоянного тока | 1985 |
|
SU1293817A1 |
| Устройство для двухзонного регулирования скорости многодвигательного электропривода | 1980 |
|
SU875570A1 |
| Многодвигательный электропривод переменного тока | 1988 |
|
SU1661960A1 |
Изобретение относится к области управления многодвигательньми электроприводами (ЭП) с несколькими источниками питания электродвигателей (ЭД), .применяемыми в механизмах передвижения мощных роторных экскаваторов, состоящих из нескольких ходовых тележек. Цель изобретения - повышение надежности работы путем изменения схемы управления в зависимости от режима нагрузки. Устройство состоит из рабочего механизма 1, ЭД 2, управляемых источников 3 питания, регуляторов (Р) 4 тока, датчиков 5 тока,, Р 6 частоты вращения, датчиков 7 частоты вращения, задат- чика 8 скорости, Р 9 выравнивания погрузки, управляемых ключей 10, блока управления (БУ) 11 ключами, блока 12 выделения максимального сигнала. Работают ЭД независимо друг от друга. При возникновении перегрузки одного из ЭД сигнал с датчика 5 вьщеляется блоком 12 и поступает на вход БУ 11. По достижении им значения уставки БУ 11 включает ключи 10, подключающие выходы Р 9 к входам Р ,6. Воздействуя на последние,Р 9 обеспечивают выравнивание нагрузки между ЭД 2 по кольцевой схеме выравнивания. При перегрузке одного из ЭД создаются условия работы ЭД, препятствующие стопорению перегруженного ЭД. 1 ил. сл О5 СП ;о со to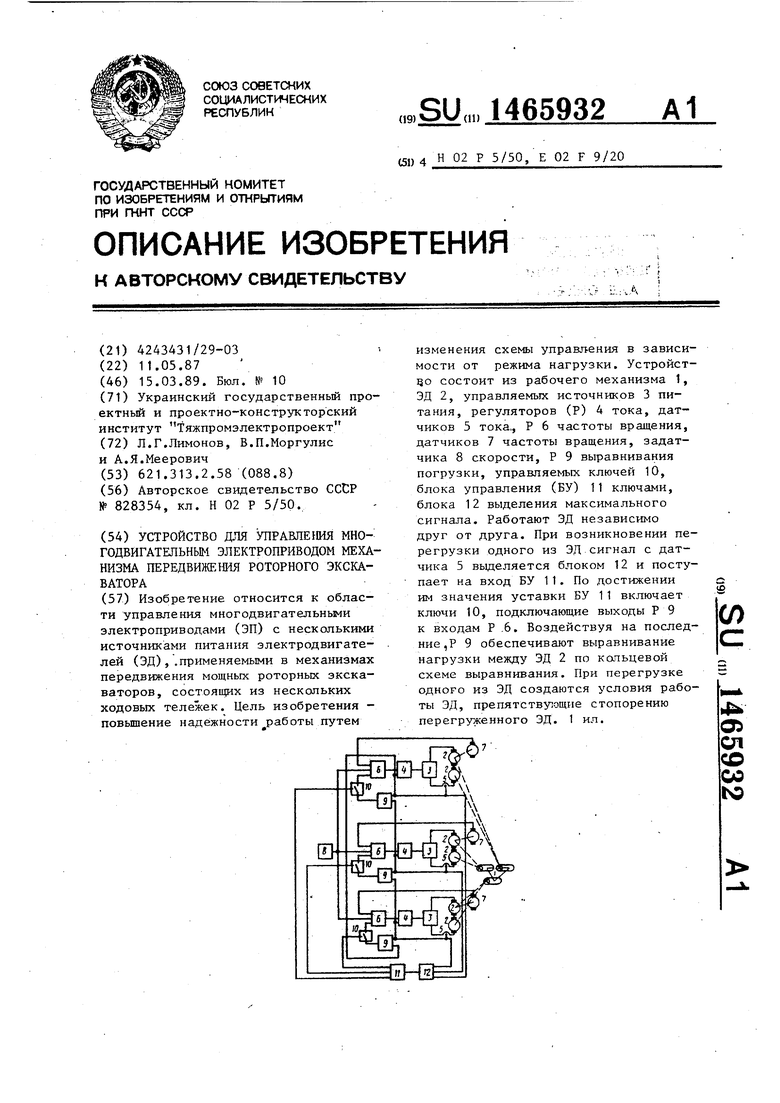
| Многодвигательный электропривод | 1977 |
|
SU828354A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
