Предлагаемый механизм для автоматического перемещения противбвеса подъемных поворотных на колонне кранах относится к известным мегханизмам, применяемым в таких же кранах я имеющим нодвиасные противовесы, автоматически дей ствующие от грузового троса, цепи и т. п; На чертеасе фиг. 1 схематически изображает общий вид механизма сбоку; фиг. 2- схему, действующих Е механизме,сил.
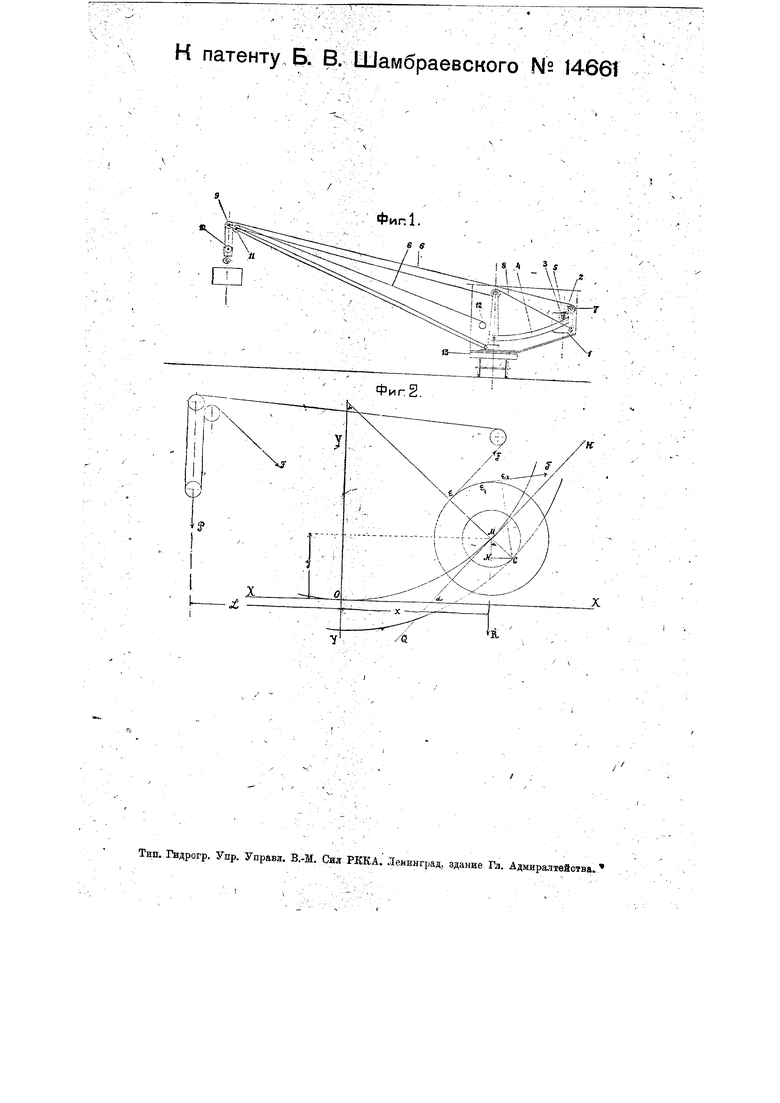
Устройство механизма для автоматического перемещения противовеса, применительно к поворотному на колонне и подвижному по рельсовому пути крану заключается в том, что установленная на платформе 13 крана (фиг. 1) его поворотная часть шарнирно связывается с онрбделенНым образом изогнутьши направляющими рельсами, другие концыкоторых поддерживаются прикрепленными к ним тягами 8, идущими к верхней. части колонки. По этим направляющим рельсам 4 на катках 3 перемещается противовес 1, свободно сидящий на пропущенной через него оси 5, на концах которой, с каждой стороны противовеса, прочно насажено по катку и шестерне. Гйестерни, диаметр круга зацепления которых равен диаметру катков, сцепляются с зубчатыми рейками, изогнутыми
подобно рельсам 4 и жестко с ними связанными. На той же оси 5 заклинен барабан о, несущей на себе несколько витков
грузового троса 6; один конец этого троса закреплен на барабане о, другой же конец его, перекинутый через удлиненный цилиндрический блок с ребордами, огибая последовательно блоки 9, 10 и 11, направляется к барабану 13 лебедки.
Таким образом при натяжении грузоподъемного троса 6 он начнет вращать барабан б, который от сцепления шестерен с зубчатыми рейками получает ноступательное вдоль них движение и, в свою очередь, через ось 2 сообщает перемещение и противовесу 1, катящемуся на роликах 5 по направляющим рельсам 4. При этом, в зависимости от величины натя;жения троса, противовес 1 займет на направляющих 4 определенное положение и создаст уравновешивающий момент, отвечающий этому положению.
Для того, чтобы горизонтальное расстояние противовеса от колонны было прямо пропорционально натяжению троса, можно придать направл:яющим рельсам 4 кривизну дуги, близкую к окружности: действительно, если примем оси XX и YY (фиг. 2) за координатную систему и обозначим через R вес противбвеса, через d диаметр катков и шестерен (по кругу зацепления), через D диаметр барабана и через F натяжение троса, и, обозначая соответственно через Р и L вес груза н вылет стрелы крана, будем иметь , где X абсцисса центра М оси противовеса. Пусть далее С есть точка касания колес к изогнутому рельсу и точка зацепления шестерен за зубчатую рейку, тогда относительно этой точки имеем моменты силы Е и силы натяжения F троса. Принимая направление силы F (фиг, 2), под нрямым углом к радиусу кривизны,
,P-L..2F CN
R СЁ откуда .
ж sin а
2 LK
sm a
tg 0.
проходящему через точку С искомой кривой, имеем , где sin а /2 d sina- . (d+ D) и а есть угол наклона касательной QST с осью XX, считая, что в.сил-у способа, подвешивания груза, .Р и, сопоставляя нредыдуп,ее, получим:
d sin а
2L -2LK .since. Щ
.- : y(-2LK)--x dx
| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН | 2010 |
|
RU2532201C2 |
| СТАНОК-КАЧАЛКА "ЦЕПЬ" | 2012 |
|
RU2501977C1 |
| Судоподъемник | 1936 |
|
SU52899A1 |
| УСТРОЙСТВО ДЛЯ ГАШЕНИЯ КОЛЕБАНИЙ ЗАХВАТНОГО ОРГАНА ПОВОРОТНОГО КРАНА ИЛИ ДРАГЛАЙНА | 1956 |
|
SU106008A1 |
| СИСТЕМА И СПОСОБ ШВАРТОВКИ СУДНА | 2019 |
|
RU2789922C2 |
| Загрузочно-разгрузочное устройство нагревательной печи | 1979 |
|
SU855370A1 |
| ЗУБЧАТО-РЫЧАЖНЫЙ ВАРИАТОР | 1998 |
|
RU2137966C1 |
| Способ видеосъемки и система для его реализации | 2019 |
|
RU2705102C1 |
| Телескопический складской кран | 1975 |
|
SU662003A3 |
| Стеллажный кран-штабелер | 1981 |
|
SU984944A1 |
или, определяя шэстоянную интегрирования, имеем, что C 2LKji
Т 2 LK- У(2 ЬКу -,
это есть уравнение окружности радиуса 4Ж: 2 LK. Рельсу же надо придать кривизну радиуса .
Так как направление силы F вообще не всегда будет параллельно QH, то и плечи ее относительно точки С будут различны, так, напр., , в силу чего в остальных положениях противовеса, уравновешивающие моменты силы F будут меньше, чем нужно, если бы кривая была по всеЁ длине окружностью. Отклонения направления силы F от принятого будут вообще незначительны и возможно найти такую кривую изгиба рельсов, которая бы заменяла собой окружность, найденную при
условии, что сила F всегда перпендикулярна к радиусу окружности, проходящему
через точку С.
Предмет п а т е н т а.
Механизм ДЛЯ автоматического неремещения противовеса в подъемнь1Х поворотных на колонне кранах, характеризующий ся нрименением барабана 5, вращаемого навитым и закрепленным на нем концом грузового троса 6 и сообщающего при этоК,. носредством сцепления с неподвижными зубчатыми рейками шестерен, наглухо, как и барабан, насаженных на концах оси Д иоступательное движение свободно сидящему на той же оси 2 противовесу 1, перемещающемуся на катках 3 но изогнутым определенным образом направляющим рельсам 4..
к патенту. Б. в. Шамбраевского № 14661

