При устройстве шлюзованных водных путей, в особенности в тех случаях, когда необходимо преодолевать большие сосредоточенные падения, вместо многоступенчатых шлюзов могут быть, как известно, применяемы, при благоприятных грунтовых условиях, судоподъемники. Однако внедрение судоподъемников в практику строительства весьма задерживается отсутствием простой и надежно действуюш.ей системы судоподъемника. В целях разрешения этого вопроса в настояш,ем предложении, относяшемся к судоподъемникам, имеющим камеру с противовесами или две взаимно уравновешенные камеры, для обеспечения бесперекосного движения камеры судоподъемника предусмотрены тросы, закрепленные наглухо в его нижней части. Верхние концы тросов перекинуты через блоки и к ним подвешены противовесы для достижения нужного натяжения тросов. На бортах камеры укреплены лебедки, служаш,ие для ее перемещения. Тросы обвивают барабаны лебедок и при вращении последних перематываются на барабанах, причем,в зависимости от направления вращения, камера будет подниматься или опускаться.
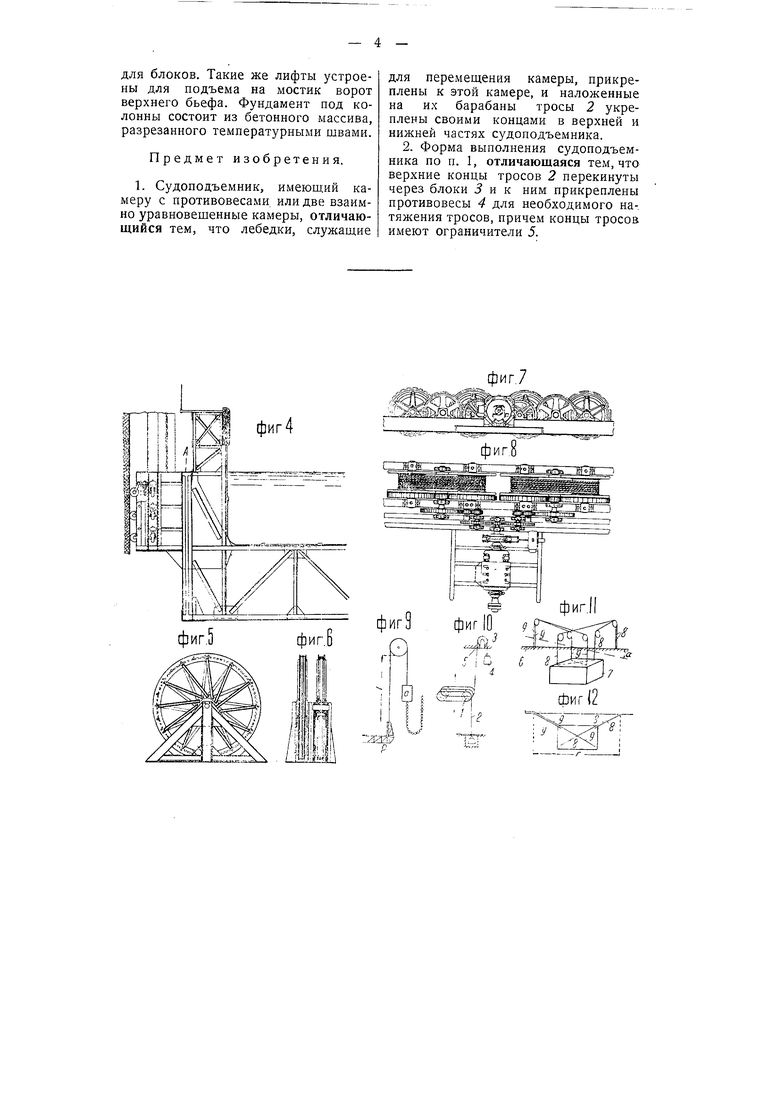
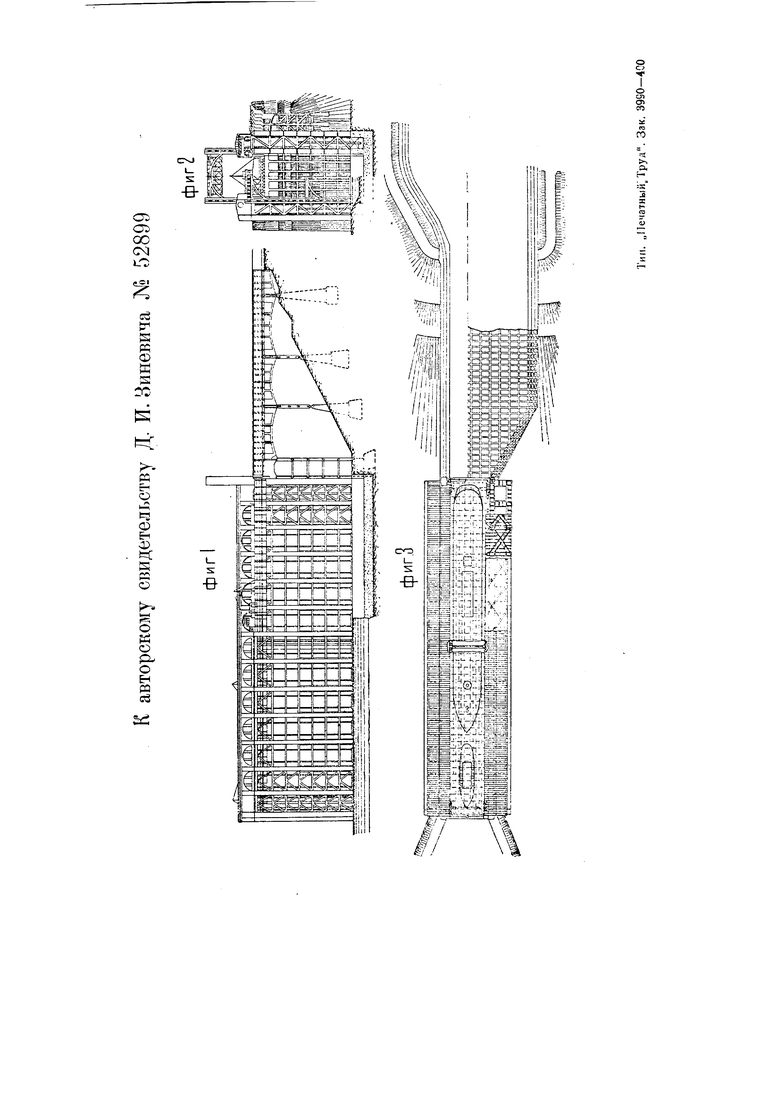
На чертеже фиг. 1, 2 и 3 изображают схематически общий вид судоподъемника (фасады и план); фиг. 4- частичный поперечный разрез камеры; фиг. 5 и 6-поддерживающие блоки (в двух проекциях); фиг. 7 и 8-механизм для передвижения камеры (в двух проекциях); фиг. 9-схему уравновешивания тросов; фиг. 10-схему навивки троса на барабаны лебедки; фиг. 11 и 12-схему расположения тросов на колоннах (в двух проекциях).
Предлагаемый судоподъемник снабжен сварной металлической камерой (фиг. 1-3), подвешенной на стальных тросах, перекинутых через блоки (фиг. 5 и 6) к железобетонным противовесам, и рассчитанной на подъем судов грузоподъемностью до 6000 т. Камера (фиг. 4) представляет собой металлический водонепроницаемый резервуар, изготовленный из листовой стали и подкрепленный продольными и поперечными ребрами жесткости. Для придания камере поперечной жесткости резервуар опирается на решетчатые фермы, концы которых заделаны в двух основных продольных фермах, служащих одновременно бортом камеры. В местах заделки поперечных ферм, расположены узлы А (фиг. 4) для прикрепления тросов, поддерживающих камеру.
Торцевые части камеры, равно как верхний и нижний бьефы, закрываются сварными подъемными металлическими воротами. Каждая пара ворот бьефа уравновешивается противовесами и соединяется механизмом с приводом от электромотора. Передвижение камеры производится электрическими лебедками в количестве, например, 12 штук, установленными на самой камере (фиг. 7, 8). На барабаны лебедок навито по 6 витков тросов, по которым и передвигается камера. Тросами заменены обычно применяющиеся зз бчатые рейки. Лебедки спарены по две на один привод от электромотора. Механизм каждой лебедки состоит из двух чугунных барабанов со стальными разгрузочными дисками, трех пар цилиндрических зубчатых колес и электромагнитного колодоч.ного и центробежного тормозов на валу мотора.
Управление лебедками и работой судоподъемника вообще централизовано. Соединение подходного канала верхнего бьефа с судоподъемником произведено через железобетонный мосто-канал. Подходный канал к нижнему бьефу вырыт в грунте и заканчивается у судоподъемника железобетонной головой с воротами. Уравновешивание камеры с водой, вес которой есть величина постоянная, произведено основными 26-ю железобетонными противовесами, весом 545 т каждый, подвешенными к камере на стальных тросах. Несущие тросы при движении камеры, свешиваясь над противовесом или камерой, в зависимости от направления движения камеры, могли бы создавать неуравновещенные силы, равные, в каждый данный момент, разности между длинами тросов над противовесом и над камерой, помноженной на вес 1 пог. м троса и на число тросов. Для уравновешивания этих сил к каждому противовесу подвешена снизу особая уравнительная цепь, другой конец которой прикреплен к колонне на середине пути движения противовеса. Из рассмотрения условий равновесия камеры Р в любой момент ее движения было найдено, что вес 1 пог. м уравнительной цепи должен быть в 4 раза тяжелее несущего троса, а вес противовеса а должен быть соответственно уменьшен на величину полного веса несущих противовес тросов (фиг. 9, где е-длина троса над камерой). Таким образом вся система оказывается уравновешенной в любом ее положении. Остаются неуравновешенными только силы сопротивления при передвижении, для преодоления которых предусмотрен специальный механизм передвижения камеры.
Как камера, так и противовесы движутся между колоннами здания судоподъемника свободно, удерживаясь от раскачивания направляющими роликами (фиг. 4), перемещающимися по рельсам, укрепленным на колоннах. Ролики укреплены на пружинах, которые дают возможность перемещения их до 150 мм, что и обеспечивает свободу подвески камеры, достаточное направление и минимальные потери на сопротивление при передвижении камеры. Таким образом вредные сопротивления передвижению камеры могут возникать только от жесткости троса при его изгибе .на блоках и от трения в осях блоков. Для уменьшения этих потерь блоки насажены на оси при посредстве роликовых подшипников, а соотнощение между диаметром троса и блока выбрано, на основе опытов, наиболее рациональным. Выжеизложенными мероприятиями удалось, по заявлению автора, достигнуть такого уравновешивания всей системы движущихся частей судоподъемника, что на одно шлюзование расходуется всего максимум 100 kWh электроэнергии, что соответственно в 6 раз меньше усовершенствованных гидравлических и в 2-4 раза меньше существующих механических судоподъемников.
Для обеспечения бесперекосного движения камеры применены, взамен обычных зубчатых реек,- стальные тросы. Кроме того для большей гарантии бесперекосного движения камеры применен еще перекрестный способ присоединения тросов, идущих от камеры к противовесам.
Согласно изобретению камера, при помощи установленных на ней лебедок, передвигается по натянутым по высоте колонн на пути движения камеры тросам 2 (фиг. 10) так же точно, как и по рейкам. С лебедками тросы 2 сцепляются благодаря силе трения, возникающей между барабанами лебедки / и тросом 2, навитым на них в 6 витков. Таким образом при работе моторов, т. е. при вращении барабанов лебедок камера имеет возможность, в зависимости от направления вращения, перепуская через барабаны неподвижно натянутые тросы 2, передвигаться вверх или вниз. Концы тросов закреплены в натянутом состоянии у фундамента и у верхнего перекрытия колонн. Для обеспечения троса от проскальзывания на барабане и получения необходимого натяжения верхние концы .тросов 2, перекинутые через блоки 5, снабжены противовесами 4 и имеют ограничители 5.
С целью обеспечения синхронной работы моторов, что необходимо при бесперекосном движении камеры, моторы лебедок правого и левого борта связаны в поперечном направлении жестким общим валом, а в продольном направлении синхронизированы по схеме электрического вала. Упомянутый выще перекрестный способ присоединения тросов заключается в том (фиг. 11 и 12), что каждая пара тросов 8, 8 или 9, 9, закрепленная на камере б в одной точке, крепится к противовесу 7 таким образом, чтобы точки их прикрепления лежали друг против друга по углам противовеса 7. При таком расположении тросов, при крене камеры на угол а, тросы S, 8 должны будут удлиниться, а тросы 9, 9 соответственно укоротиться. Натяжение в тросах изменится, но так как наклона противовеса 7 при этом не произойдет, то в точках подвеса к камере тросов 5, 8 усилие возрастет, в точках же подвеса тросов 9, 9 упадет на эту же величину. На камеру начнет действовать восстанавливающий момент, величина которого всегда будет больше крепящего момента, вызванного от перемещения воды при крене ее на тот же
угол а. Таким образом малейший крен камеры будет немедленно уничтожаться возникающим при этом восстанавливающим моментом, т. е. продольный крен камеры невозможен.
Блоки Сфиг. 5, 6), поддерживающие тросы, переброшенные от камеры к противовесам, установлены на перекрытии колонн с доподъемника.
Каждый блок поддерживает по три троса и представляет собой металлический сварной обод, прикрепленный к ступице спицами, расположенными таким образом, чтобы они работали только на сжатие или растяжение. Блоки спарены по два в одну общую сварную обойму.
Со стороны нижнего и верхнего бьефов судоподъемника имеется по две пары ворот, служащих для разобщения каналов от камеры. Ворота приняты сварными обычной конструкции. Открывание ворот производится при помощи механизмов, принцип действия которых аналогичен механизму для подъема камеры. Механизмы располагаются (фиг. 1-3) для ворот нижнего бьефа на мостике, укрепленном на колоннах здания судоподъемника, и для ворот верхнего бьефа- на таком же мостике, поднятом на специальных башнях. Для уменьшения затраты энергии на подъем, ворота уравновешены противовесами. Тяговые тросы от механизма к воротам присоединены таким образом, что при подъеме особой автоматической сцепкой захватываются обе пары ворот. Ворота уплотняются обычным способом.
Здание судоподъемника воздвигается на общем основании и представляет собой рамную конструкцию, состоящую из четырех параллельно идущих на протяжении, примерно 180 м, пустотелых колонн, связанных перекрытием, несущим направляющие блоки (фиг. 1-3).
В продольном направлении колонны связаны между собой парными распорками, в .поперечном-распорками и раскосами. Четыре угловые колонны приняты несколько ббльших размеров и приспособлены для движения лифтов, устроенных для сообщения с верхним бьефом и помещениями
для блоков. Такие же лифты устроены для подъема на мостик ворот верхнего бьефа. Фундамент под колонны состоит из бетонного массива, разрезанного температурными швами.
Предмет изобретения.
1. Судоподъемник, имеющий камеру с противовесами или две взаимно уравновешенные камеры, отличающийся тем, что лебедки, служащие
для перемещения камеры, прикреплены к этой камере, и наложенные на их барабаны тросы 2 укреплены своими концами в верхней и нижней частях судоподъемника.
2. Форма выполнения судоподъемника по п. 1, отличающаяся тем, что верхние концы тросов 2 перекинуты через блоки 5 и к ним прикреплены противовесы 4 для необходимого натяжения тросов, причем концы тросов имеют ограничители 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вертикальный судоподъемник | 1940 |
|
SU60785A1 |
| Причально-наводочное устройство для поперечного перемещения плавучих средств | 1980 |
|
SU894055A1 |
| Продольный слип | 1939 |
|
SU58935A1 |
| Плавучий задвижной затвор | 1939 |
|
SU59471A1 |
| Наклонный поперечный судоподъемник | 1985 |
|
SU1355672A1 |
| Наклонный судоподъемник | 1986 |
|
SU1350245A1 |
| ПОДВОДНЫЙ СУДОПОДЪЕМНИК | 1970 |
|
SU268278A1 |
| Гидротехническое сооружение | 1979 |
|
SU846636A1 |
| Отвесная наметка | 1949 |
|
SU81683A1 |
| Судоподъемник для судов | 1981 |
|
SU972002A1 |
фиг7
