Изобретение относится к автоматике и может быть использовано в системах автоматического контроля и управления вращающимися объектами, как устройство для преобразования скорости вращения в пропорциональньгй электрический (аналоговьш и цифровой) сигнал . и регулятор скорости.
Цель изобретения - расширение функциональных возможностей,
На чертеже представлена функциональная схема регулятора.
Регулятор содержит генератор 1 импульсов, реверсивный сдвигающий регистр 2, импульсный датчик 3 оборотов, элементы И-НЕ 4 и 5, прербра- зователь 6 напряжение - частота, элемент НЕ 7, элемент И-НЕ 8, элементы И 9 и 10, реверсивный счетчик 11 и цифроаналоговый преобразователь 12,
Управляющие входы реверсивного сдвигающего регистра 2 соединены с импульсным датчиком 3 через элемент НЕ 7 и элемент И-НЕ 8. Прямые выходы регистра 2 подключены к входам элемента И 9, а инверсные - к входам элемента И 10. Датчик 3 жестко свя- Ьан с контролируемым элементом. Первые входы элементов И-НЕ 4 и 5 объединены и соединены с вькодом генератора 1 импульсов. Вторые входы элементов И-НЕ 4 и 5 соответственно подключены If выходам элементов И 9 и 10. Вычитающий и суммирующий входы счетчика 11 соединены соответственно с выходами элементов И-НЕ 4 и 5, а выг ход счетчика 11 является цифровым
откроется элемент И 10 и соответст вующий ему элемент И-НЕ 5, пропуск импульсы на суммирующий вход счетч ка 11. Код на выходе счетчика 11 п ступает на входы преобразователя 1 Напряжение на выходе преобразовате 12 формируется на выходе преобразо вателя 6 напряжение - частота в ча тоту следования импульсов. Когда эта частота станет равна частоте им пульсов от датчика 3, то первый же лишний импульс запишет в регистр одну единицу и закроет,тем самым элемент И 10. На счетчике 11 и на 30 преобразователе 12 установятся зна чения, соответствующие частоте импульсов от датчика 3. Снижение угл вой скорости вала датчика 3 привед к тому, что частота преобразовател станет вьше частоты датчика 3, регистр 2 за полнится единицами, откр ются элементы И 9 и И-НЕ 4. Импуль от генератора поступят на вычитающ вход счетчика 11. В результате вьк
выходом регулятора и подключен к входу цифроаналогового преобразователя 12. W ной код на счетчике 11 и уровень
:на выходе преобразователя 12, т.е.
Выход преобразователя 12 является
аналоговым выходом устройства и соединен с входом преобразователя 6 напряжение - частота. Счетный вход ре- . гистра 2 подключен к выходу преобразователя 6. Входы сброса счетчика 11 и начальной установки регистра 2 объединены и являются входом регулятона аналоговом выходе регулятора на чнут убьшать до появления в регист 2 первого нуля, который закроет эл мент И 9 и элемент И-НЕ 4.
Регулятор скорости установится новое состояние динамического равн весия. Таким образом, выходные пар метры регулятора (код и уровень си нала) следят за изменением входног параметра - ч;астоты датчика 3, свя занного кинематически с валом двиг теля (не показан), который управля ся сигналами с элементов И 9, 10 «55 через ключи (не показаны).
ра для сигнала начальной установки при включении регулятора. Второй выход датчика 3 (выход напраапения) подключен к входу смешения преобразователя 12 и, одновременно, является третьим выходом устройства. Частота импульсов, снимаемых t генератора 1, выбирается заведомо большей максимально возможной частоты импульсов с выхода датчика 3.
Регулятор работает следующим образом.
При включении регулятора на объединенные входы сброса счетчика 11 и начальной установки регистра 2 поступает импульс. При этом обнуляется счетчик 11, а регистр 2 устанавливается в код -0. Элементы И-НЕ 4 и 5 закрыты.
При появлении импульсов от датчика 3 в сдвигающем регистре 2 происходит сдвиг назад логической 1. Когда в оба разряда регистра 2 окажутся записанными логические О,
откроется элемент И 10 и соответствующий ему элемент И-НЕ 5, пропуская импульсы на суммирующий вход счетчика 11. Код на выходе счетчика 11 поступает на входы преобразователя 12, Напряжение на выходе преобразователя 12 формируется на выходе преобразователя 6 напряжение - частота в частоту следования импульсов. Когда эта частота станет равна частоте импульсов от датчика 3, то первый же лишний импульс запишет в регистр 2 одну единицу и закроет,тем самым элемент И 10. На счетчике 11 и на преобразователе 12 установятся значения, соответствующие частоте импульсов от датчика 3. Снижение угловой скорости вала датчика 3 приведет к тому, что частота преобразователя 6 станет вьше частоты датчика 3, регистр 2 за полнится единицами, откроются элементы И 9 и И-НЕ 4. Импульсы от генератора поступят на вычитающий вход счетчика 11. В результате вькод
ной код на счетчике 11 и уровень
на аналоговом выходе регулятора начнут убьшать до появления в регистре 2 первого нуля, который закроет элемент И 9 и элемент И-НЕ 4.
Регулятор скорости установится в новое состояние динамического равновесия. Таким образом, выходные параметры регулятора (код и уровень сигнала) следят за изменением входного параметра - ч;астоты датчика 3, связанного кинематически с валом двигателя (не показан), который управляется сигналами с элементов И 9, 10 через ключи (не показаны).
Формула изобретения
Регулятор скорости, содержащий генератор импульсов, импульсный дат
чик оборотов, соединенньй первым выходом с первым входом первого элемента И-НЕ и входом элемента НЕ, реверсивный сдвигающий регистр, соединенный первым управляющим входом с выходом первого элемента И-НЕ, вторым Зтравляющим входом - с выходом элемента НЕ, прямыми вькодами с соответствующими входами первого элемента И, а инверсные выходами - с соответствующими входами второго элемента И, второй инверсный выход реверсивного сдвигающего ресистра соединен с вто10
регистра, вход начальной установки которого объединен с входом сброса реверсивного счетчика и соединен с шиной начальной установки, выход генератора импульсов соединен с первыми входами второго и третьего элементов И-НЕ, подключенных вторыми входами к выходам соответственно первого и второго элементов И, а выходами - соответственно к вычитающе- iNfy и суммирующему входам реверсивного счетчика, соединенного разрядными вькодами с соответствующими разряд. -„-.ui V- t-t/vJi ПС мчвуплдИМИ разряд-
рым входом первого элемента И-НЕ, при 15 ными входами цифроаналогового преоб ЧТПМ RhTVnTTt.l ncit-iT /-i-n/-. .,™-.
этом выходы первого и второго элементов И являются соответственно первым и вторым выходами регулятора, отличающийся тем, что, с целью расширения функциональных возможностей, в него введены второй и третий элементы И-НЕ, реверсивньй счетчик, цифроаналоговьй преобразователь и преобразователь напряжениеразователя, подключенного выходом к входу преобразователя напряжение-частота, причем второй вькод импульсного датчика соединен с входом смешения 20 цифроаналогового преобразователя и является выходом сигнала направления вращения, а выходы реверсивного счетчика и цифроаналогового преобразователя являются выхода соответствен- i.j-r-i.iiw -.л iJiJuxv cirari С-Ои 1 Мэс 1 L-TBGH
частота, соединенньй выходом со счет- 25 но цифрового и аналогового сигналов. ным входом реверсивного сдвигающего
1467537
регистра, вход начальной установки которого объединен с входом сброса реверсивного счетчика и соединен с шиной начальной установки, выход генератора импульсов соединен с первыми входами второго и третьего элементов И-НЕ, подключенных вторыми входами к выходам соответственно первого и второго элементов И, а выходами - соответственно к вычитающе- iNfy и суммирующему входам реверсивного счетчика, соединенного разрядными вькодами с соответствующими разряд. -„-.ui V- t-t/vJi ПС мчвуплдИМИ разряд-
ными входами цифроаналогового преобными входами цифроаналогового преоб
разователя, подключенного выходом к входу преобразователя напряжение-частота, причем второй вькод импульсного датчика соединен с входом смешения цифроаналогового преобразователя и является выходом сигнала направления вращения, а выходы реверсивного счетчика и цифроаналогового преобразователя являются выхода соответствен- i.j-r-i.iiw -.л iJiJuxv cirari С-Ои 1 Мэс 1 L-TBGH
но цифрового и аналогового сигналов. 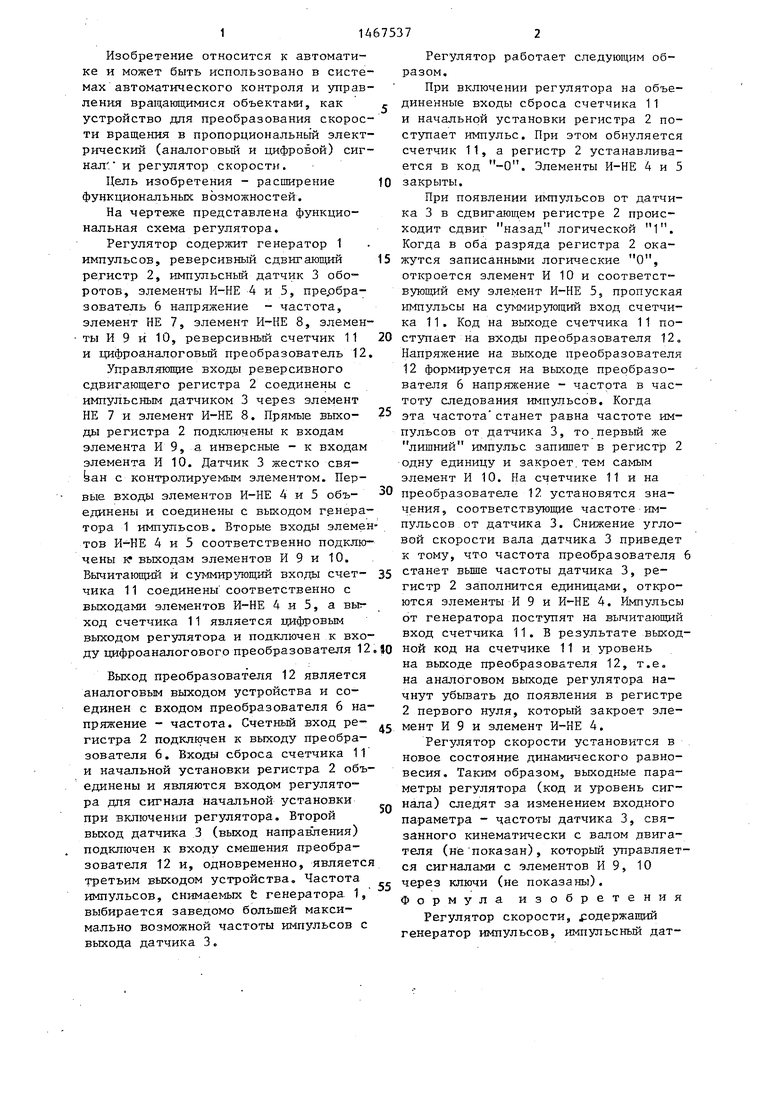
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Импульсный спектрометр ядерного магнитного резонанса | 1985 |
|
SU1318875A1 |
| Устройство для программного управления шаговым двигателем | 1983 |
|
SU1141378A1 |
| Устройство для регулирования компенсатора реактивной мощности | 1986 |
|
SU1372466A1 |
| Устройство для управления следящим приводом | 1987 |
|
SU1442975A1 |
| Устройство для воспроизведения функций | 1984 |
|
SU1164745A1 |
| Устройство для коррекции характеристик измерительных преобразователей | 1982 |
|
SU1100630A1 |
| Устройство для регулирования колебаний | 1986 |
|
SU1429093A2 |
| Устройство для электропунктуры | 1984 |
|
SU1217413A1 |
| Адаптивный регулятор для управляемых вентильных преобразователей /его варианты/ | 1983 |
|
SU1104629A1 |
Изобретение относится к автоматике и может быть использовано в сии,ифро6ой 8ы8од Ме чническая связь с.звеном Сигнал начальной установки. стемах автоматического контроля и управления вращающимися объектами как устройство для преобразования скорости вращения в пропорциональный электрический (аналоговьш и цифровой) сигнал и регулятор скорости. Цель изобретения - расширение функциональ- ьп- К возможностей. Для этого в регулятор скорости, содержащий генератор импульсов, импульсный датчик 3 оборотов, реверсивный сдвигающий регистр 2, элемент И-НЕ 8, элемент НЕ 7 и элементы И 9, 10, введены элементы И-НЕ 4,5, реверсивный счетчик 11 с цифровым выходом дифроаналоговьй преобразователь 12 с аналоговым выходом и преобразователь 6 напряжение - частота. 1 ил. fianpaS eHue Вращения Аналоговый t. бымд S (Л 4;; 05 ел со |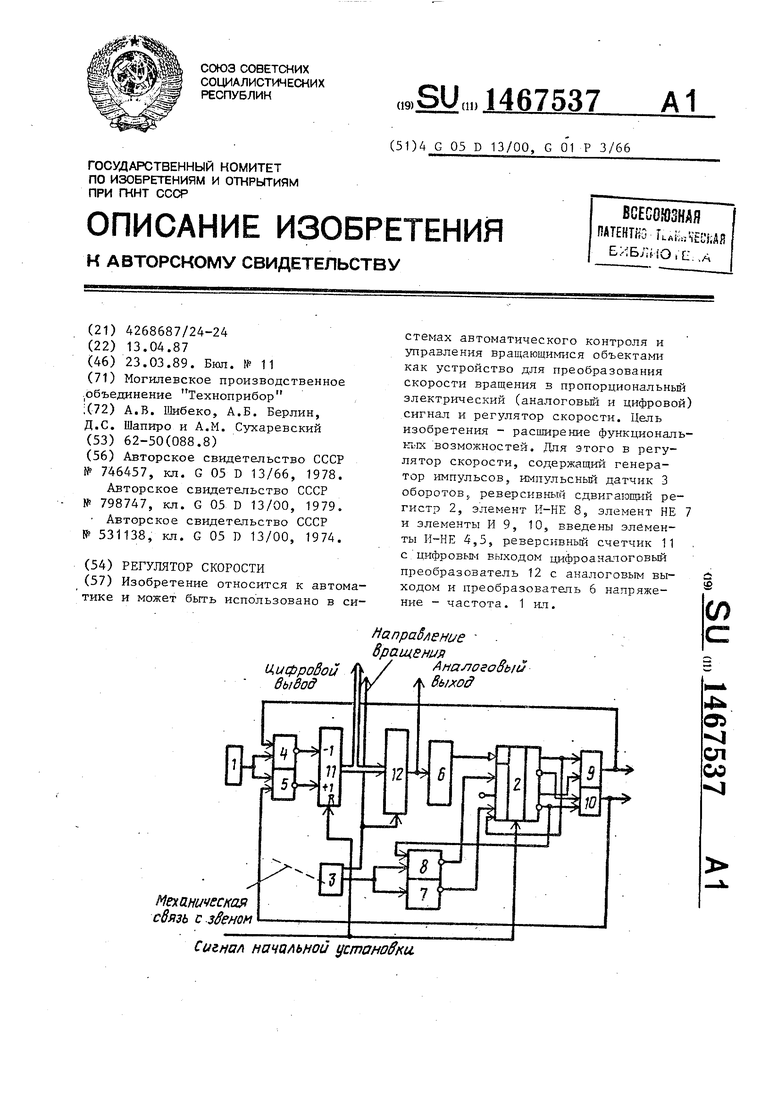
| Устройство для регулирования скорости вращения | 1978 |
|
SU746457A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для стабилизации скоростиэлЕКТРОпРиВОдА | 1979 |
|
SU798747A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Стабилизатор оборотов двигателя | 1974 |
|
SU531138A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
