4ib 1чЭ
СО
ы
ел
Изобретение относится к автоматическому управлению и может быть использовано в следящих системах управления приводами роботов, манипу- ляторов, а также в системах числового программного управления станками и при решении задач автоматизации технологических процессов, предпочтительно при управлении переме- щением исполнительных органов различных механизмов с абсолютным отсчетом величины перемещения.
Целью изобретения является улучшение эксплуатационных характеристик устройства для управления следящим приводом.
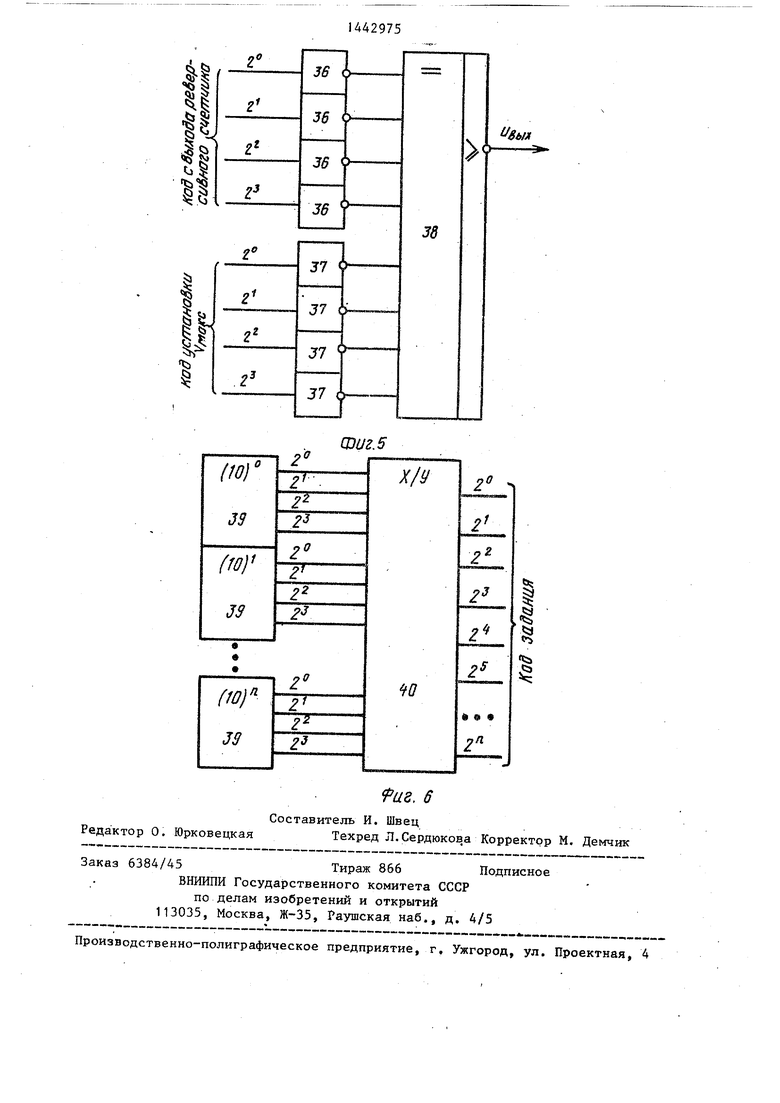
На фиг. изображена структурная схема предложенного устройства, на фиг. 2 - пример выполнения схемы генератора; на фиг. 3 - схема блока разгона-торможения; на фиг. 4 - структурная схема узла коррекции нуля датчика обратной связи с вторым сумматором; на фиг. 5 - схема блока уставки ; на фиг. 6 - схема формирователя сигналов задания.
Устройство для управления следящим приводом (фиг. I) содержит фор- мирователь 1 сигналов задания, датчик 2 обратной связи, привод 3, третий 4 и втарой 5 буферные регистры, первый сумматор 6, первый буферный регистр 7. генератор 8 импульсов, цифроаналоговый преобразователь (ЦАП 9, узел 10 сравнения кодов, блок П формирования сигнала разгона-торможения, блок 12 гальванических развязок, элементы И 13 и 14, ревер- сивный счетчик 15, блок 16 уставки максимальной скорости, узел 17 коррекции нуля датчика, второй сумматор I8 и исполнительный механизм 19.
Входы узла 17 коррекции подключе- ны к выходам датчика 2 обратной связ а выходы узла 17 коррекции - к соответствующим входам второго сумматора 18, выходы которого подключены к информационным входам второго буферного регистра 5.
В качестве датчика 2 обратной связи в устройстве может быть использован любой датчик абсолютного отсче- .та, имеющий на выходе параллельный двоичный код с числом разрядов, равным числу разрядов двоичного кода на выходе формирователя сигналов задания, на пример преобразователь пере
5
0 5
,{) Q
с
0
5
мещений кодовый ППК-15. Можно использовать любой фотоэлектрический датчик, но при этом необходимо между датчиком и вторым буферньи регистром 5 включить счетчик-накопитель, который формирует абсолютный двоичный код положения исполнительного механизма, (На фиг. 1 показаны связи применительно к датчику 1ШК-15).
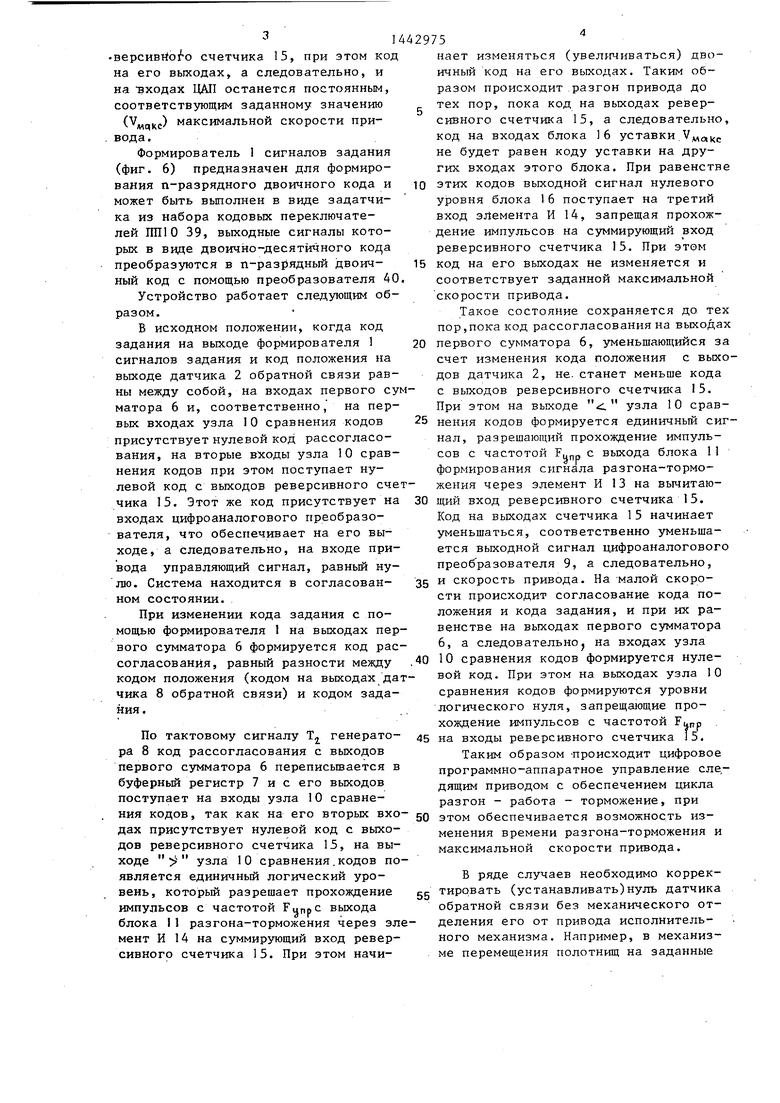
Генератор 8 (фиг. 2) может быть выполнен на базе кварцевого резонатора G, элементов НЕ 20-22, счетчика 23, дешифратора 24 и счетчика 25.
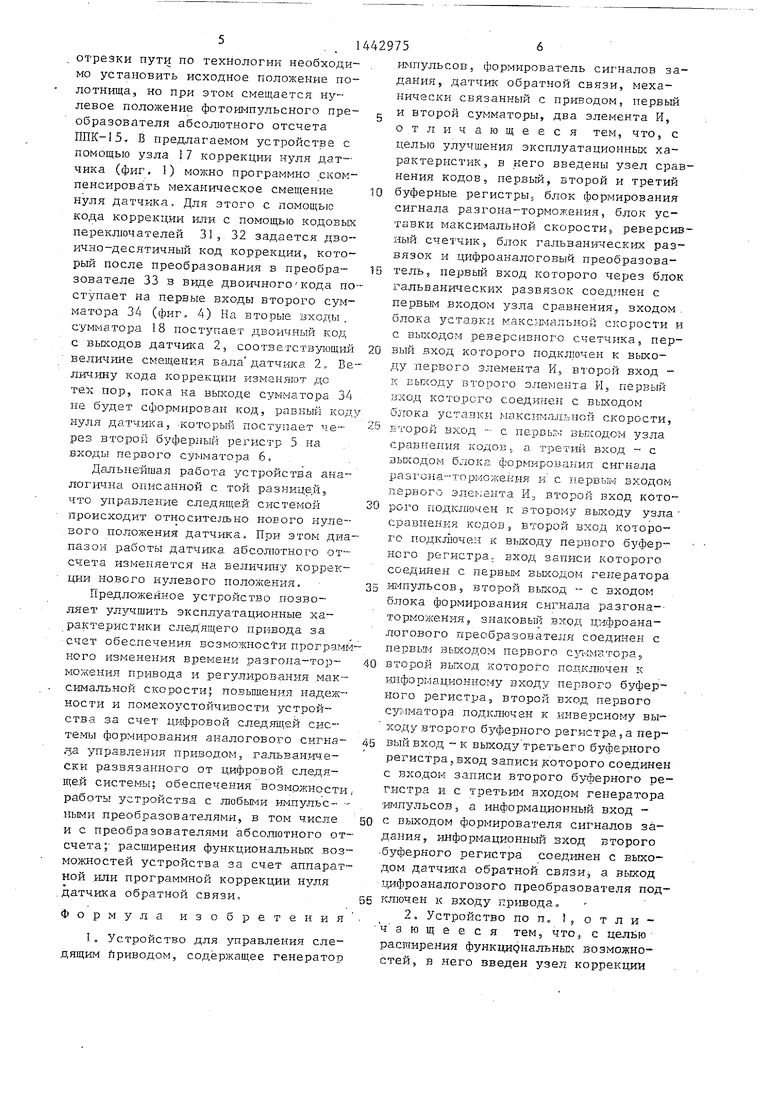
Блок i I формирования сигнала разгона-торможения выполнен на базе инверторов 26-29 и счетчика 30 с переменным коэффициентом деления. С помощью кода уставки можно изменить коэф- фицр1снт деления счетчика 30 и,соответственно, изменять частоту импульсов Fg(,jj,, поступающих на входы реверсивного счетчика 15 через элементы И 13 и 14. Код уставки может быть сформирован с помощью КОДОВР К переклю- чатвлей.ППЮ.
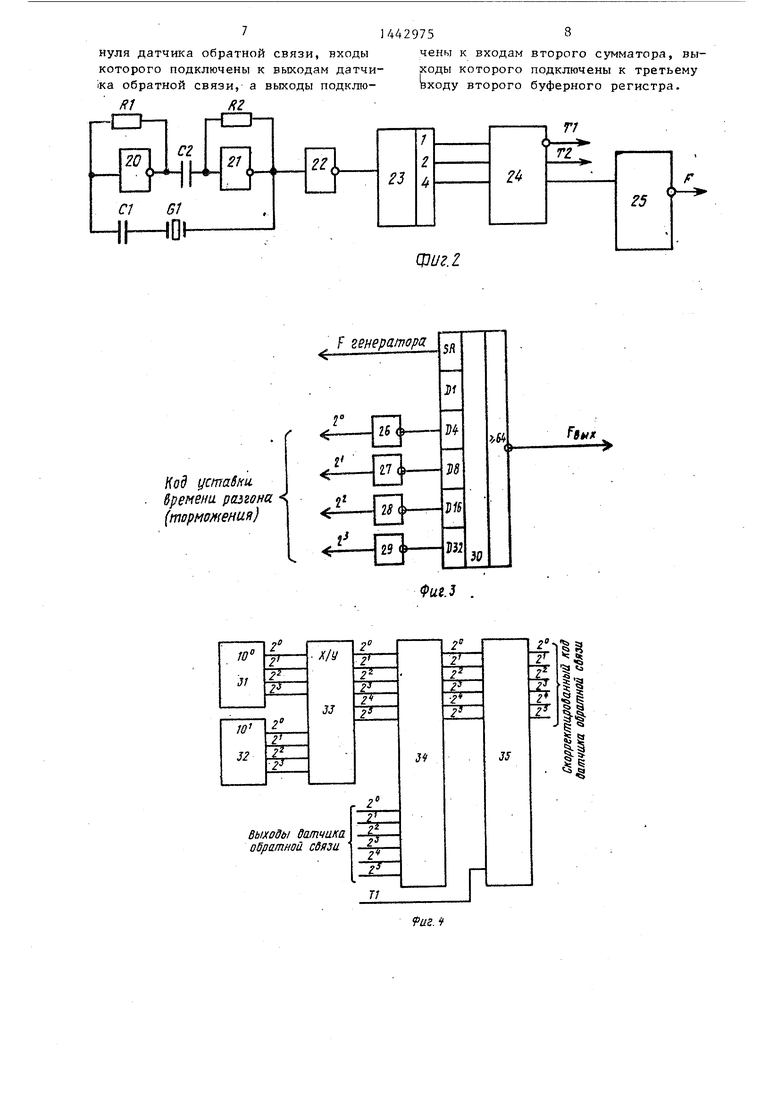
Коррекция нулевого состояния датчика 2 осуществляется с помощью корректирующего кода, который формируется с помощью кодовых переключателей 31 и 32; преобразователя 33 кода и сумматора 34 (фиг.4), Выходной скорректированный код датчика обратной связи с выходов второго сумматора поступает на входы регистра 35 и по тактовому сигналу Т вьщается на соответствующие входы первого сумматора 6. Узел коррекции совместно с вторым сумматором 18 позволяют смещать начало отсчета датчика обратной связи без изменения его положения относительно исполнительного механизма,.
Блок уставки максимальной скорости Привода (фиг. 5) содержит инверторы 36 и 37 и элемент 38 сравнения, проводит сравнение двух кодов, один из которых поступает с выходов реверсивного счетчика 15 через -инверторы 36, а другой код устаВКи может быть сформирован с помощью переключателей ПШО и преобразователей двоично-десятичного кода в двоичньй аналогично фиг. 4. Когда код уставки и код на выходах счетчика I5 равны между собой, выходной сигнал узла 10 сравнения кодов через элемент И 14 (фиг о- 1) запрещает, прохождение сигналов FUHB суммирующий вход реBepcHBriofo счетчика 15, при этом код на его выходах, а следовательно, и на зходах ЦА11 останется постоянным, соответствующим заданному значению (мчкс) максимальной скорости привода.
Формирователь 1 сигналов задания (фиг. 6) предназначен для формирования п-разрядного двоичного кода и может быть выполнен в виде задатчи- ка из набора кодовых переключателей ППЮ 39, выходные сигналы которых в виде двоично-десятичного кода преобразуются в п-раз1 ядный двоичный код с помощью преобразователя 40
Устройство работает следующим образом.
В исходном положении, когда код задания на выходе формирователя 1 сигналов задания и код положения на вькоде датчика 2 обратной связи равны между собой, на входах первого суматора 6 и, соответственно, на первых входах узла 10 сравнения кодов присутствует нулевой код рассогласования, на вторые входы узла 10 сравнения кодов при этом поступает нулевой код с выходов реверсивного сче
нает изменяться (увелргчиваться) двоичный код на его выходах. Таким образом происходит разгон привода до тех пор, пока код на выходах реверсивного счетчика 15, а следовательно, код на входах блока 16 уставки не будет равен коду уставки на других входах этого блока. При равенстве этих кодов выходной сигнал нулевого уровня блока t 6 поступает на третий вход элемента И 14, запрещая прохождение импульсов на суммирующий вход реверсивного счетчика 15. При этом код на его выходах не изменяется и соответствует заданной максимальной скорости привода.
Такое состояние сохраняется до тех пор,пока код рассогласования на выходах первого сумматора 6, уменьшающийся за счет изменения кода положения с выходов датчика 2, не. станет меньше кода с выходов реверсивного счетчика 15.
При этом на выходе
узла 1 О срав25 нения кодов формируется единичный сигнал, разрешающий прохождение импульсов с частотой Рипр с выхода блока 1 1 формирования сигнала разгона-торможения через элемент И 13 на вычитаю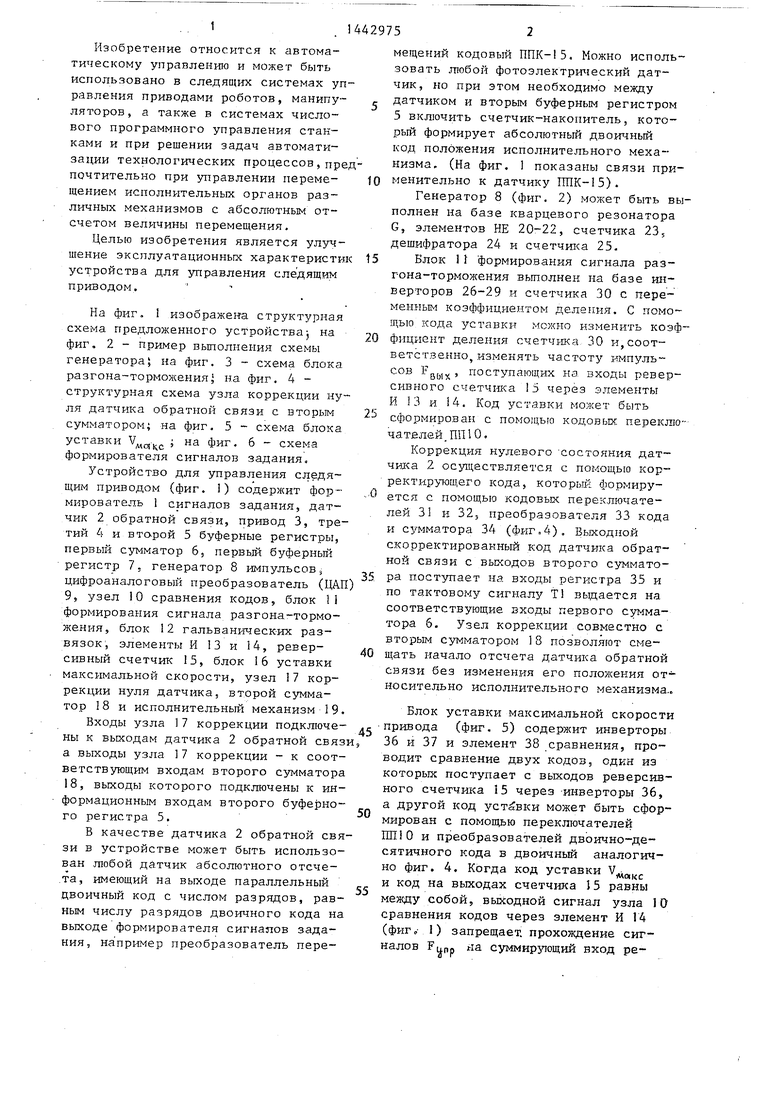
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое устройство для формирования и испытания химического источника тока | 1983 |
|
SU1112446A1 |
| Цифровой следящий привод | 1983 |
|
SU1151925A1 |
| Устройство для цифрового позиционного управления | 1982 |
|
SU1084740A1 |
| Многоканальное устройство для программного управления | 1978 |
|
SU748431A1 |
| Устройство для программного управления шаговым двигателем | 1983 |
|
SU1141378A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для программного управления позиционированием | 1984 |
|
SU1213466A1 |
| Система управления многоканальнымэлЕКТРОпРиВОдОМ РОбОТА | 1979 |
|
SU805246A1 |
| Цифровая система регулирования скорости центробежного аппарата | 1983 |
|
SU1176302A1 |
| Устройство управления позиционированием | 1987 |
|
SU1462248A1 |
Изобретение относится к автоматическому управлению и может быть использовано в следящих системах управления приводами роботов, манипуляторов , а также в системах числового программного управления станками. Целью изобретения является улучшение эксплуатационных характеристик и расширение функциональньк возможностей. Устройство для управления, следящим приводом содержит формирователь сигналов задания 1, буферные регистры 4,5,7, датчик обратной связи 2, привод 3, сумматоры 6, 18, генератор импульсов 8, цифроаналоговый преобразователь 9, узел сравнения кодов 10, элементы И 13, 14, реверсивный счетчик 15, блок уставки максимальной скорости 16, блок формирования сигнала разгона-торможения 11, узел коррекции нуля датчика 17, блок гальванических развязок 12. Изобретение позволяет повысить надежность и помехоустойчивость устройства за счет цифровой следящей системы формирования аналогового сигнала управления приводом, гальванически развязанного от цифровой следящей системы, обеспечить возможность работы устройства с любьми импульсными преобразователями перемещений, расщи- рить функциональные возможности за счет аппаратной или программной коррекции нуля датчика обратной связи. 1 з.п. ф-лы, 6 ил. (Л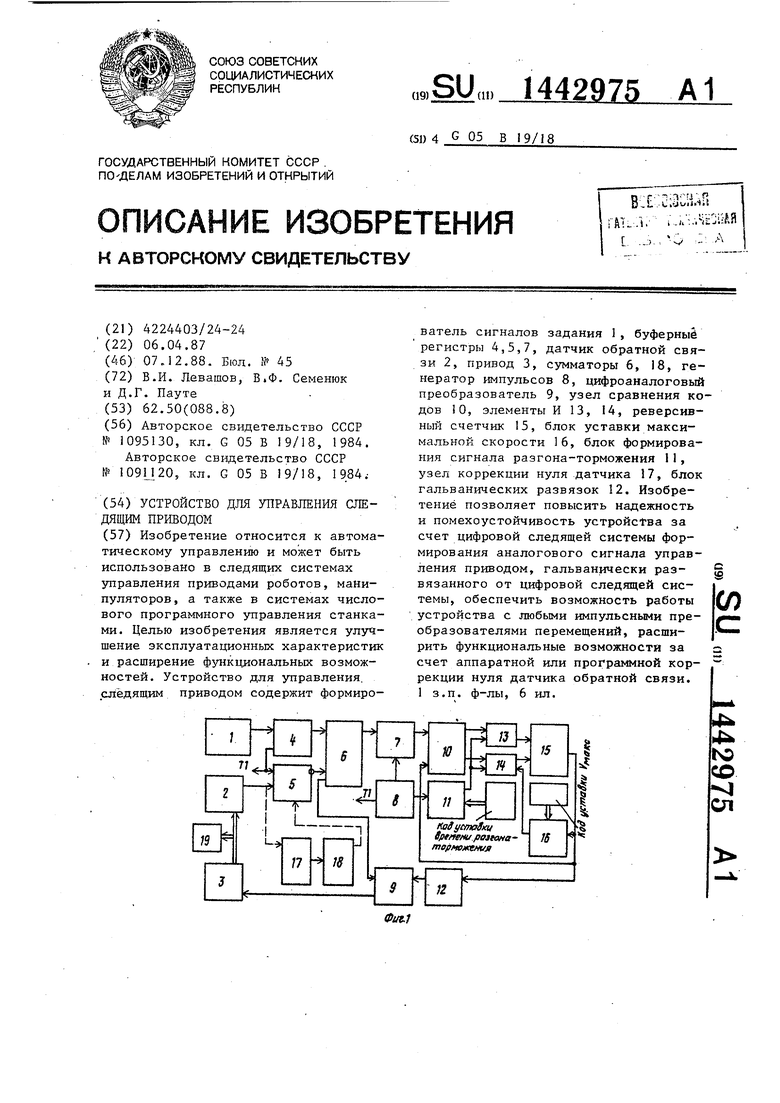
чика 15. Этот же код присутствует на 30 щий вход реверсивного счетчика 15.
входах цифроаналогового преобразователя, что обеспечивает на его выходе, а следовательно, на входе привода управляющий сигнал, равный нулю. Система находится в согласованном состоянии.
При изменении кода задания с помощью формирователя 1 на выходах первого сумматора 6 формируется код рассогласования, равный разности между кодом положения (кодом на выходах датчика 8 обратной связи) и кодом задания.
40 10 сравнения кодов формируется нулевой код. При этом на выходах узла 10 сравнения кодов формируются уровни логического нуля, запрещшощие прохождение импульсов с частотой
По тактовому сигналу Т генерато- 45 на входы реверсивного счетчика 15.
ра 8 код рассогласования с выходов первого сз мматора 6 переписьшается в буферньй регистр 7 и с его выходов поступает на входы узла 10 сравнения кодов, так как на его вторых вхо- go этом обеспечивается возможность из- дах присутствует нулевой код с выхо- менения времени разгона-торможения и дов реверсивного счетчика 15, на вы- максимальной скорости привода. ходе узла 10 сравнения .кодов появляется единичный логический уровень, которьм разрешает прохождение импульсов с частотой FunpC выхода блока I1 разгона-торможения через элемент И 14 на суммирующий вход реверсивного счетчика 15. При этом начиТаким образом -происходит цифровое программно-аппаратное управление сле, дящим приводом с обеспечением цикла разгон - работа - торможение, при
В ряде случаев необходимо коррек- сс тировать (устанавливать)нуль датчика обратной связи без механического отделения его от привода исполнительного механизма. Например, в механизме перемещения полотнищ на заданные
Код на выходах счетчика 15 начинает уменьшаться, соответственно уменьшается выходной сигнал цифроаналогового преоб разователя 9, а следовательно,
и скорость привода. На малой скорости происходит согласование кода положения и кода задания, и при их равенстве на выходах первого сумматора 6, а следовательноJ на входах узла
10 сравнения кодов формируется нулевой код. При этом на выходах узла 10 сравнения кодов формируются уровни логического нуля, запрещшощие прохождение импульсов с частотой
на входы реверсивного счетчика 15.
этом обеспечивается возможность из- менения времени разгона-торможения и максимальной скорости привода.
Таким образом -происходит цифровое программно-аппаратное управление сле,- дящим приводом с обеспечением цикла разгон - работа - торможение, при
go этом обеспечивается возможность из- менения времени разгона-торможения и максимальной скорости привода.
В ряде случаев необходимо коррек- сс тировать (устанавливать)нуль датчика обратной связи без механического отделения его от привода исполнительного механизма. Например, в механизме перемещения полотнищ на заданные
отрезки пути по технологии необходимо установить исходное положение полотнища, но при этом смещается нулевое положение фотош пульсного преобразователя абсолютного отсчета ГШК-15, В предлагаемом устройстве с помощью узла I7 коррекции нуля дат- чика (фиг. I) можно программно скомпенсировать механическое смещение нуля датчика. Для этого с помощью кода коррекции i-ти с помощью кодовых переключателей 31, 32 задается двоично-десятичный код коррекции, который после преобразования в преобразователе 33 3 виде двоичного кода поступает на первые входы второго сумматора 34 (фиг, 4) На вторые входы, сумматора 18 поступает двоичный код с выходов датчшса 2, соответствующий величине смещения вала датчика 2„ Величину кода коррекции изменяют до тек пор, пока на выходе сумматора 34 не будет сформирован код, равный коду нуля датчика, который поступает через второй буферный регистр 5 на входь первого сумматора 6,
Дальнейшая работа устройства аналогична описанной с той разнице.й, что управление следящей системой происходит отиоситехгьно нового i-iyne- вого положения датчика. При этом дна- пазог работы датчика абсолютного отсчета изменяется на величину коррекции нового нулевого положения.
Предложенное устройство позволяет улучшить эксплуатационные характеристики следящего привода за счет обеспечения возможности программного изменения времени разгона-тор-- можения привода и регулирования максимальной скорости повьпдения надежности и помехоустойчивости устройства за счет цифровой следяхцей системы формирования аналогового сигна- да управления приводом, гальванич:е ОКИ развязанного от цифровой следящей системы; обеспечения возможности работь устройства с любыми импульс- ными преобразователями, в том числе и с преобразователями абсолютного отсчета; расширения функциональных воз можиостей устройства за счет аппаратной ,1-ши программной коррекции нуля .датчика обратной связи.
Формула изобретен ия
1 о Устройство для управления следящим Приводом, содержащее генератор
импульсов 5 формирователь сиг налов задания, датчик обратной связи, механически связанный с приводом, первый
и второй сумматоры, два элемента И, отличающееся тем, что, с целью улучшения эксплуатационньгх характеристик, в него введены узел сравнения кодов 5 первый, второй и третий буферные регистры; блок формирования сигнала разгона-тормолсения, блок уставки максимальной скорости, реверсив - ный счетчик, блок гальванических развязок и цифроаналоговы:й преобразователь, первый вход которого через блок гальванических развязок соединен с первым в}содом узла сравнения, входом , блока з стазки макошальной скорости и с вькодом реверсивного счетчика, первый вход которого подключен к выходу первого элемента И. второй вход - к выходу Bi oporo элемента И, первый вход которого соединен с выходом блока устазки максимальной скорости,
второй вход - с первым вькодом узла сравнения кодов,, а третий вход - с зькодом блока формирования сигнала разгона-тормо;-кения и с 1шрвь;м входом первого элег ;анта И, второй вход которого подключен к второму выходу узла сравнения кодовэ второй вход которо™ I o подктаочен к выходу первого буферного регистра., вход записи которого соединен с первьЕ вькодом генератора
.ш-тульсов, второй вькод -- с входом блока формирования сигнала разгона- торможения, знаковьп вход цифроана- логового преобразователя соединен с nepBbit f выходом первого с -гматора,
второй выход которого подключен к илфорг.зационному входу первого буферного регистра, второй вход первого сумматора подключен к инверсному вы- ходу второго б уферного регистра,а первый вход -к выходу третьего буферного регистра .вход записи .которого соединен с входом записи второго буферного регистра и с третьи - входом генератора Импульсов, а информационный вход с выходом формирователя сигналов задания, информационный вход второго буферного регистра соединен с выходом датчика обратной связи, а выход цифроаналогового преобразователя подключен к входу ,
2, Устройство по Пс 5 о т л и - ч а ю щ а е с я тем, что с целью расиирения функциднальнык возможно стей, в него введен узел коррекции
нуля датчика обратной связи, входы которого подключены к выходам датчика обратной связи, а выходы подклю/ / кг
Hod устаёки. бремени, разгона (тормтенир)
чены к входам второго сумматора, выходы которого подключены к третьему входу второго буферного регистра.
UZ.l
1 §1
i - ||
tj § Is
I
p
I
Фиг. 5
I I
| Устройство для управления манипулятором | 1983 |
|
SU1095130A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Шкив для канатной передачи | 1920 |
|
SU109A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
