Изобретение относится к средствам механизации погрузочно-разгрузочных работ, в частности к грузоподъемным устройствам, служащим для разгрузки или погрузки в транспортное средство контейнеров на колесах.
Цель изобретения - повышение безопасности работ при погрузке и разгрузке контейнеров увеличенной высоты и улучшение использования за счет этого грузового объема кузова транспортного средства.
На фиг. 1 изображен механизм, обший вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - схема расположения колес контейнеров; на фиг. 4 - вид А на фиг. 1; на фиг. 5 - разрез Б-Б на фиг. 2; на фиг. 6 - узел I на фиг. 2; на фиг. 7 - узел И на фиг. 2; на фиг. 8 - сечение В-В на фиг. 4; на фиг. 9 - разрез Г-Г на фиг. 6; на фиг. 10 - сечение Д-Д на фиг. 7; на фиг. 11 - вид Е на фиг. 7.
Грузоподъемный механизм, закрепленный в задней части кузова 1 транспортного средства 2 для перевозки увеличенных по высоте контейнеров 3 и выполненный в виде плоских пятизвенников, содержит опорную плош,адку 4, на которой закреплены направляющие 5 для контейнеров 3, снабженные стопорами 6.
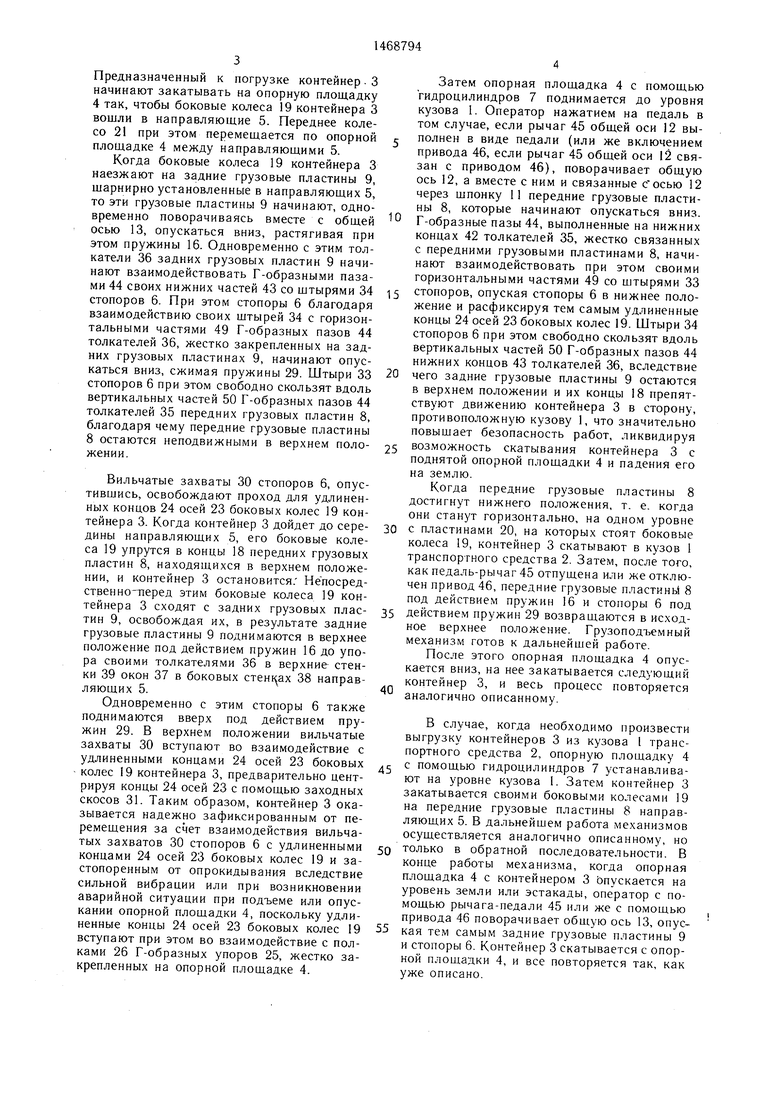
Привод механизма осуш,ествляется посредством гидроцилиндров 7, шарнирно закрепленных на раме кузова 1. Каждая направляющая 5 снабжена грузовыми пластинами, передними 8 и задними 9, симметрично расположенными относительно поперпечной оси О-О опорной площадки 4. Грузовые пластины 8 и 9 с помощью своих кронштейнов 10 установлены на шпонках 11 на осях 12 и 13, обших для соответственно передних 8 и задних 9 грузовых пластин обеих направляющих 5. Оси 12 и 13 размещены параллельно поперечной оси О-О опорной площадки 4 и установлены с возможностью поворота в опорах 14, жестко закрепленных на опорной площадке 4. От осевого смещения оси 12 и 13 зафиксированы пружинными кольцами 15.
Таким образом, грузовые пластины 8 и 9 шарнирно закреплены по концам направляющих 5, имеют возможность вертикального перемещения путем поворота на осях 12 и 13 и подпружинены в верхнем направлении посредством пружин 16, один конец которых связан с кронштейнами 10, а второй - с упорами 17, жестко установленными на опорной площадке 4.
Расстояние / между концами 18 грузовых пластин 8 и 9 выбирается таким, чтобы между ними разместилось одно из боковых колес 19 контейнера 3, а высота /г .концов 18 грузовых пластин 8 и 9 над уровнем жестко закрепленной пластины 20 направляющих 5 выбирается такой, чтобы при упоре бокового колеса 19 контейнера 3 в один из концов 18
0
5
0
5
0
5
0
5
0
5
грузовых пластин 8 или 9 оно стопорилось бу от дальнейшего перемещения в этом направлении и не подминало бы под себя ту грузовую пластину 8 или 9, с концом 18 которой боковое колесо 19 контейнера 3 взаимодействует.
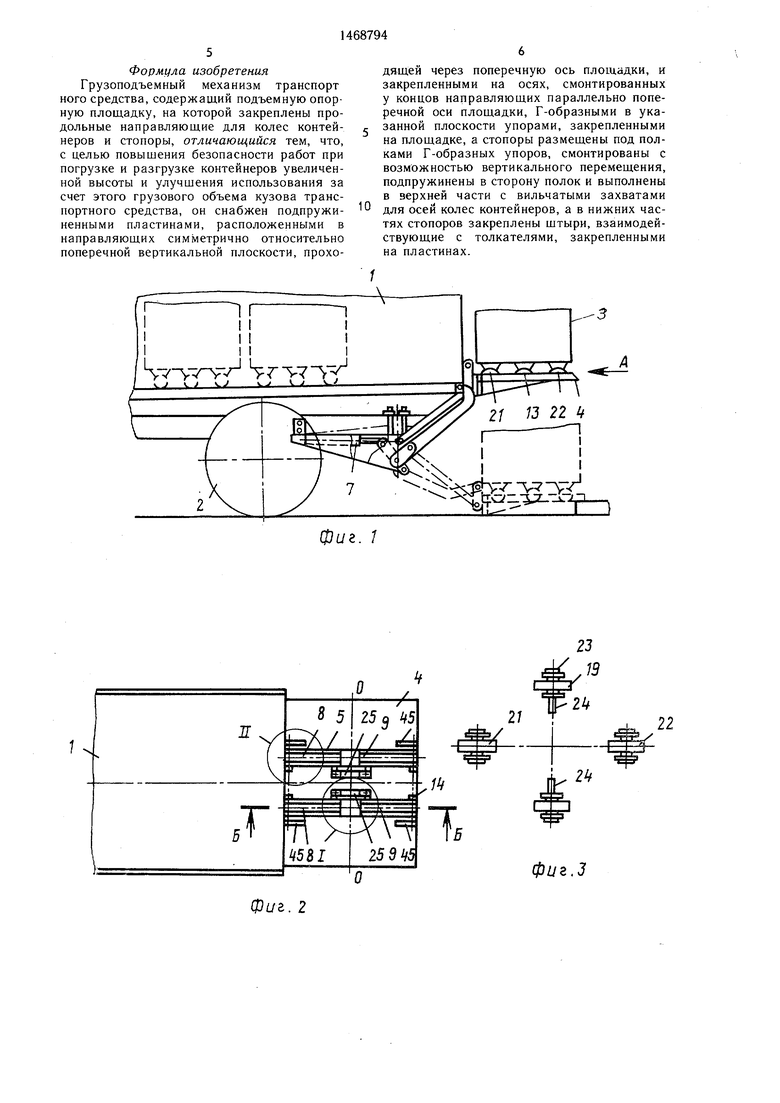
Боковые 19, переднее 21 и заднее 22 колеса контейнера 3 размещены в средней части сторон днища контейнера 3 (фиг. 3). Оси 23 боковых колес 19 контейнера 3 выполнены с удлиненными концами 24, направленными навстречу друг другу. Опорная площадка 4 снабжена Г-образными упорами 25, жестко закрепленными на ней между направляющими 5 симметрично относительно поперечной оси О-О. Стопоры 6 размещены под полками 26 Г-образных упоров 25 с возможностью вертикального перемещения во втулках 27, запрессованных в основаниях 28 Г-образных упоров 25. Стопоры 6 подпружинены в сторону полок 26 пружинами 29 и снабжены в верхней своей части вильчатыми захватами 30, снабженными заходны- ми скосами 31 и взаимодействующими при работе с удлиненными концами 24 осей 23 боковых колес 19 контейнеров 3. Кроме того, удлиненные концы 24 осей 23 имеют возможность при работе взаимодействовать с полками 26 Г-образных упоров 25. Противоположные концы 32 стопоров 6 снабжены жестко закрепленными на них штырями 33 и 34.
Грузовые пластины 8 и 9 снабжены жестко закрепленными на них толкателями 35 и 36, которые выходят за пределы направляющих 5 через окна 37 в стенках 38 направляющих 5. Верхние стенки 39 окон 37 играют роль упоров для толкателей 35 и 36, которые через пазы соответственно 40 и 41 проходят к нижним концам 32 стопоров 6. На нижних концах 42 и 43 соответственно толкателей 35 и 36 выполнены Г-образные. пазы 44, посредством которых толкатели 35 и 36 имеют возможность поочередного взаимодействия с соответствующими штырями 33 и 34 стопоров 6.
На концах общих осей 12 и 13 жестко установлены рычаги 45, служащие для поворота общих осей 12 или 13 совместно с грузовыми пластинами 8 или 9. Рычаги 45 могут быть выполнены в виде педалей, когда для удобства выполнения работ они могут быть установлены на всех четырех концах осей 12 и 13. Рычаги 45 могут быть также связаны с приводами 46, штоки 47 которых взаимодействуют с пазами 48 рычагов 45. Г-образные пазы 44 толкателей 35 и 36 содержат горизонтальные 49 и вертикальные 50 части.
Грузоподъемный механизм работает следующим образом.
Для того, чтобы осуществить загрузку кузова 1 транспортного средства 2 контейнерами 3, опускают опорную, площадку 4 грузоподъемного механизма с помощью гидроцилиндров 7 до уровня эстакады или земли, где располагаются контейнеры 3.
Предназначенный к погрузке контейнер. 3 начинают закатывать на опорную площадку 4 так, чтобы боковые колеса 19 контейнера 3 вошли в направляющие 5. Переднее колесо 21 при этом перемещается по опорной площадке 4 между направляющими 5.
Когда боковые колеса 19 контейнера 3 наезжают на задние грузовые пластины 9, шарнирно установленные в направляющих 5 то эти грузовые пластины 9 начинают, одновременно поворачиваясь вместе с общей осью 13, опускаться вниз, растягивая при этом пружины 16. Одновременно с этим толкатели 36 задних грузовых пластин 9 начинают взаимодействовать Г-образными пазами 44 своих нижних частей 43 со штырями 34 стопоров 6. При этом стопоры 6 благодаря взаимодействию своих штырей 34 с горизонтальными частями 49 Г-образных пазов 44 толкателей 36, жестко закрепленных на задних грузовых пластинах 9, начинают опускаться вниз, сжимая пружины 29. Штыри 33 стопоров 6 при этом свободно скользят вдоль вертикальных частей 50 Г-образных пазов 44 толкателей 35 передних грузовых пластин 8, благодаря чему передние грузовые пластины 8 остаются неподвижными в верхнем положении.
Вильчатые захваты 30 стопоров 6, опустившись, освобождают проход для удлинен- концов 24 осей 23 боковых колес 19 контейнера 3. Когда контейнер 3 дойдет до середины направляющих 5, его боковые колеса 19 упрутся в концы 18 передних грузовых пластин 8, находящихся в верхнем положении, и контейнер 3 остановится. Непосредствен нотеред этим боковые колеса 19 контейнера 3 сходят с задних грузовых пластин 9, освобождая их, в результате задние грузовые пластины 9 поднимаются в верхнее положение под действием пружин 16 до упора своими толкателями 36 в верхние стенки 39 окон 37 в боковых стенках 38 направляющих 5.
Одновременно с этим стопоры 6 также поднимаются вверх под действием пружин 29. В верхнем положении вильчатые захваты 30 вступают во взаимодействие с удлиненными концами 24 осей 23 боковых - колес 19 контейнера 3, предварительно центрируя концы 24 осей 23 с помощью заходных скосов 31. Таким образом, контейнер 3 оказывается надежно зафиксированным от перемещения за счет взаимодействия вильчатых захватов 30 стопоров 6 с удлиненными концами 24 осей 23 боковых колес 19 и застопоренным от опрокидывания вследствие сильной вибрации или при возникновении аварийной ситуации при подъеме или опускании опорной площадки 4, поскольку удлиненные концы 24 осей 23 боковых колес 19 вступают при этом во взаимодействие с полками 26 Г-образных упоров 25, жестко закрепленных на опорной площадке 4.
10
i 5
20
Затем опорная площадка 4 с помощью гидроцилиндров 7 поднимается до уровня кузова I. Оператор нажатием на педаль в том случае, если рычаг 45 общей оси 12 выполнен в виде педали (или же включением привода 46, если рычаг 45 общей оси 12 связан с приводом 46), поворачивает общую ось 12, а вместе с ним и связанные 12 через щпонку 11 передние грузовые пластины 8, которые начинают опускаться вниз. Г-образные пазы 44, выполненные на нижних концах 42 толкателей 35, жестко связанных с передними гру зовыми пластинами 8, начинают взаимодействовать при этом своими горизонтальными частями 49 со штырями 33 стопоров, опуская стопоры 6 в нижнее положение и расфиксируя тем самым удлиненные концы 24 осей 23 боковых колес 19. Штыри 34 стопоров 6 при этом свободно скользят вдоль вертикальных частей 50 Г-образных пазов 44 нижних концов 43 толкателей 36, вследствие чего задние грузовые пластины 9 остаются в верхнем положении и их концы 18 препятствуют движению контейнера 3 в сторону, противоположную кузову 1, что значительно повышает безопасность работ, ликвидируя возможность скатывания контейнера 3 с поднятой опорной плошадки 4 и падения его на землю.
Когда передние грузовые пластины 8 достигнут нижнего положения, т. е. когда они станут горизонтально, на одном уровне 30 с пластинами 20, на которых стоят боковые колеса 19, контейнер 3 скатывают в кузов 1 транспортного средства 2. Затем, после того, как педаль-рычаг 45 отпущена или жеотклю- чен привод 46, передние грузовые пластины 8 под действием пружин 16 и стопоры 6 под действием пружин 29 возвращаются в исходное верхнее положение. Грузоподъемный механизм готов к дальнейшей работе.
После этого опорная площадка 4 опускается вниз, на нее закатывается следующий контейнер 3, и весь процесс повторяется
25
5
0
аналогично описанному.
В случае, когда необходимо произвести выгрузку контейнеров 3 из кузова I транспортного средства 2, опорную площадку 4 5 с помощью гидроцилиндров 7 устанавливают на уровне кузова 1. Затем контейнер 3 закатывается своими боковыми колесами 19 на передние грузовые пластины 8 направляющих 5. В дальнейшем работа механизмов осуществляется аналогично описанному, но только в обратной последовательности . В конце работы механизма, когда опорная площадка 4 с контейнером 3 Ьпускается на уровень земли или эстакады, опе ратор с помощью рычага-педали 45 или же с помощью привода 46 поворачивает общую ось 13, опуская тем самым задние грузов ые пластины 9 и стопоры 6. Контейнер 3 скатывается с опорной площадки 4, и все повторяется так, как уже описано.
0
5
Фopмt лa изобретения Грузоподъемный механизм транспорт ного средства, содержащий подъемную опорную площадку, на которой закреплены продольные направляющие для колес контейнеров и стопоры, отличающийся тем, что, с целью повыщения безопасности работ при погрузке и разгрузке контейнеров увеличенной высоты и улучшения использования за счет этого грузового объема кузова транспортного средства, он снабжен подпружиненными пластинами, расположенными в направляющих симметрично относительно поперечной вертикальной плоскости, прохо
дящей через поперечную ось площадки, и закрепленными на осях, смонтированных у концов направляющих параллельно поперечной оси площадки, Г-образными в указанной плоскости упорами, закрепленными на площадке, а стопоры размещены под полками Г-образных упоров, смонтированы с возможностью вертикального перемещения, подпружинены в сторону полок и выполнены в верхней части с вильчатыми захватами для осей колес контейнеров, а в нижних частях стопоров закреплены штыри, взаимодействующие с толкателями, закрепленными на пластинах.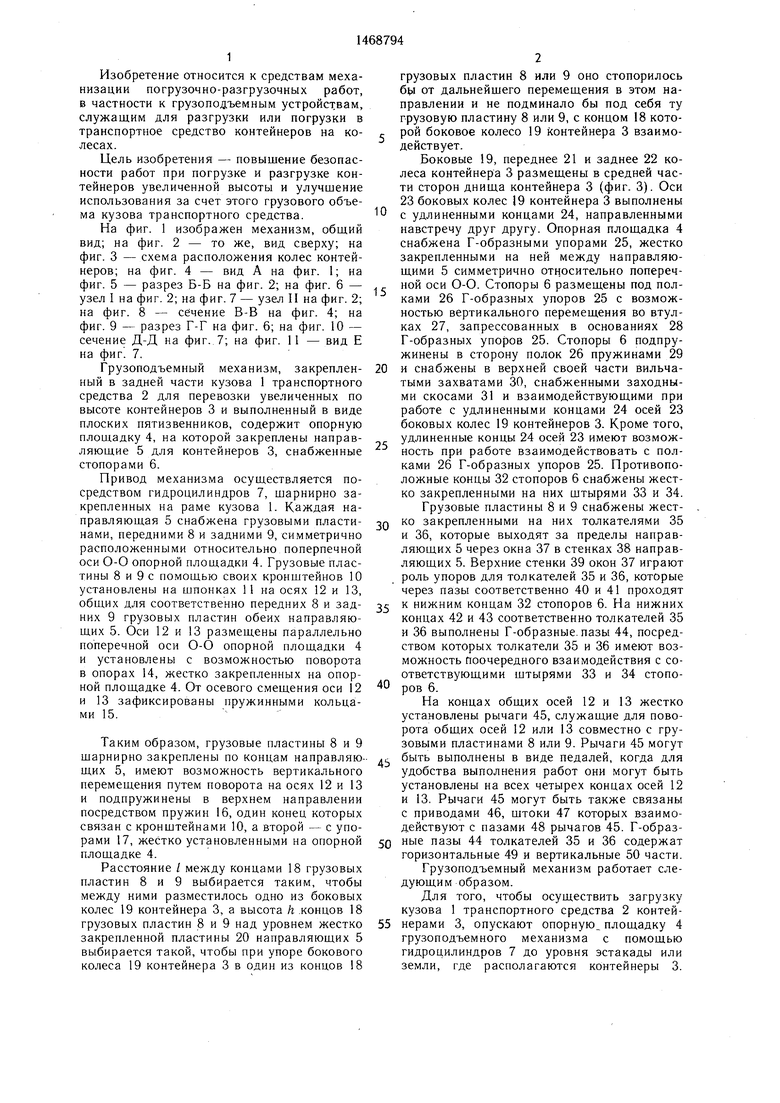
| название | год | авторы | номер документа |
|---|---|---|---|
| БОЛЬШЕГРУЗНЫЙ ТРАНСПОРТНЫЙ КОНТЕЙНЕР | 1994 |
|
RU2125532C1 |
| ПРИЦЕП К ЛЕГКОВОМУ АВТОМОБИЛЮ | 2014 |
|
RU2578653C1 |
| Транспортное средство для перевозки аварийных транспортных средств | 1991 |
|
SU1830014A3 |
| Складная эстакада для погрузки-разгрузки вагонов и фургонов | 2018 |
|
RU2691485C1 |
| ПЕРЕГРУЗЧИК | 1991 |
|
RU2020088C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ ШТУЧНЫХ ГРУЗОВ | 1990 |
|
RU2094252C1 |
| Погрузчик | 1982 |
|
SU1129180A1 |
| УСТРОЙСТВО ДЛЯ ВЫГРУЗКИ СЫПУЧИХ ГРУЗОВ ИЗ МЯГКИХ КОНТЕЙНЕРОВ ЧЕРЕЗ ИХ ГОРЛОВИНУ | 2005 |
|
RU2280006C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ): ЛЫЖА, ЛЫЖЕРОЛЛЕРЫ, ШАРНИРНОЕ ЛЫЖНОЕ КРЕПЛЕНИЕ, ЛЫЖНЫЕ БОТИНКИ И СПОСОБЫ ХОДА НА ТРАНСПОРТНОМ СРЕДСТВЕ | 2010 |
|
RU2414275C1 |

Изобретение относится .к средствам механизации погрузочно-разгрузочных работ. Целью изобретения является повышение безопасности работ при погрузке и разгрузке контейнеров увеличенной высоты и улучшение использования за счет этого грузового объема кузова транспортного средства. Для этого опорная плошадка 4 механизма снабжена направляюшими 5 для боковых колес 19 контейнера. По краям направляющих 5 шарнирно установлены на осях 12 и 13 соответственно передняя 8 и задняя 9 грузовые пластины. При наезде контейнера своими боковыми ко.чесами 19 на грузовые пластины. // W J8 1 например задние 9, они опускаются и взаимодействуют Г-образными пазами 44 своих толкателей 36 со штырями 34 стопоров 6, которые опускаются вниз вместе с концами 18 грузовых пластин 9. Когда колеса 19 доходят до упора в концы 18 передних грузовых пластин 8, то задние грузовые пластины 9 поднимаются вверх под действием пружин 16. Стопоры 6 при этом поднимаются под действием пружин и своими захватами 30 взаимодействуют с концами 24 удлиненных осей, фиксируя за счет этого контейнер от перемещения. За счет взаимодействия концов 24 осей с полками 26 Г-образных упоров 25 контейнер оказывается надежно зафиксирован от опрокидывания. После этого опорная площадка 4 поднимается до уровня кузова транспортного средства и нажатием на педаль оси 12 грузовые пластины 8 опускаются вниз, а за счет вза}1модей- ствия Г-образных пазов 44 своих толкателей 35 со штырями стопоров 6 последние опускаются, расфиксируя контейнер, который теперь легко скатывается в кузов транспортного средства. Д.ля разгрузки контейнеров все операции повторяются в последовательности, обратной описанному. 11 нл. S (Л с 4 a ос С 25 39, 9 38 ,flJ S
фиг. /
Фиг. 2
V V-f
Ч тд -фцг.З
Фиг. 6
Фиг. ii
5 9
Фиг. 7
В-В
50
Фиг. 8
5 /4
15
15 12
г.9
Вид Е
«7 4
Фиг. 11
| Патент США № 3451572, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
