Изобретение относится к манипуляторам, а более конкретно - к одноковшовым экскаваторам со сменными рабочими органами.
Цель изобретения - расширение эксплуатационных возможностей и повышение надежности.
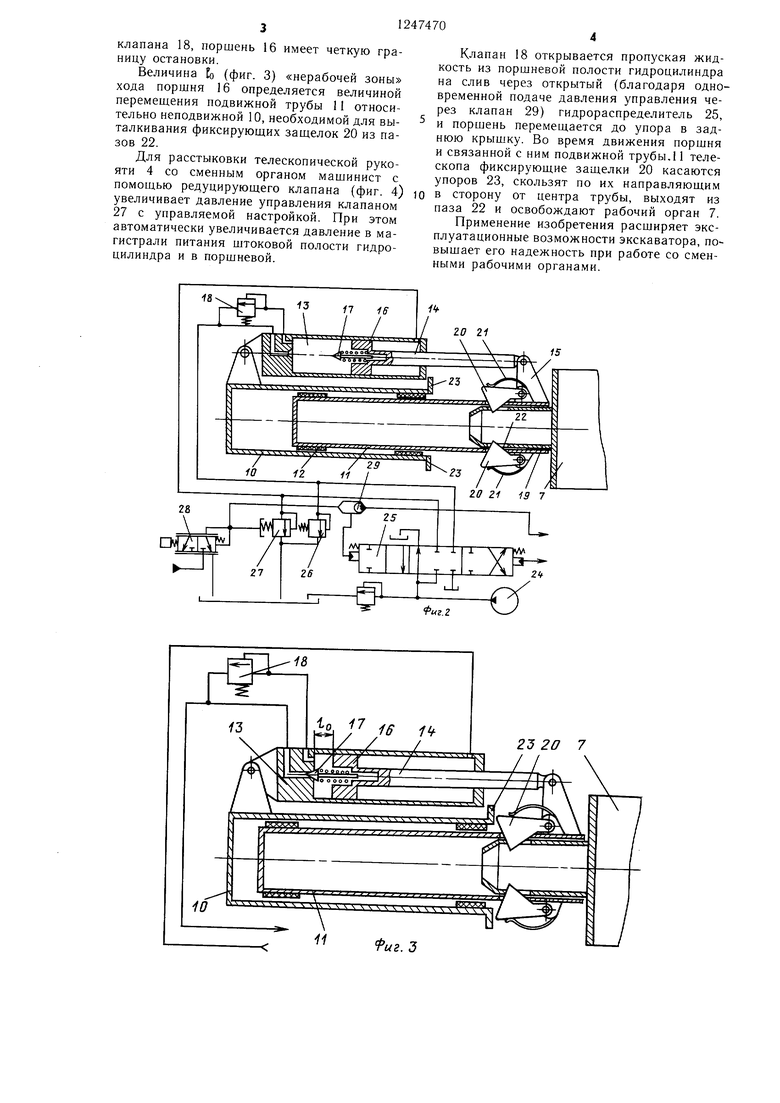
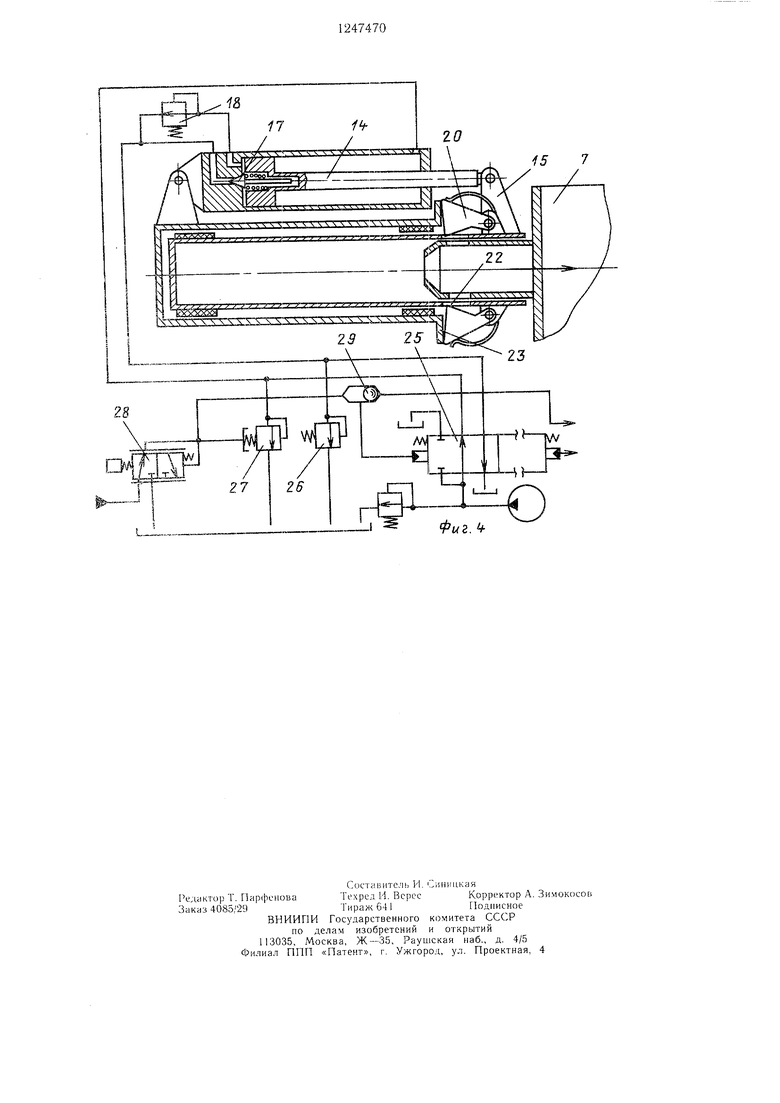
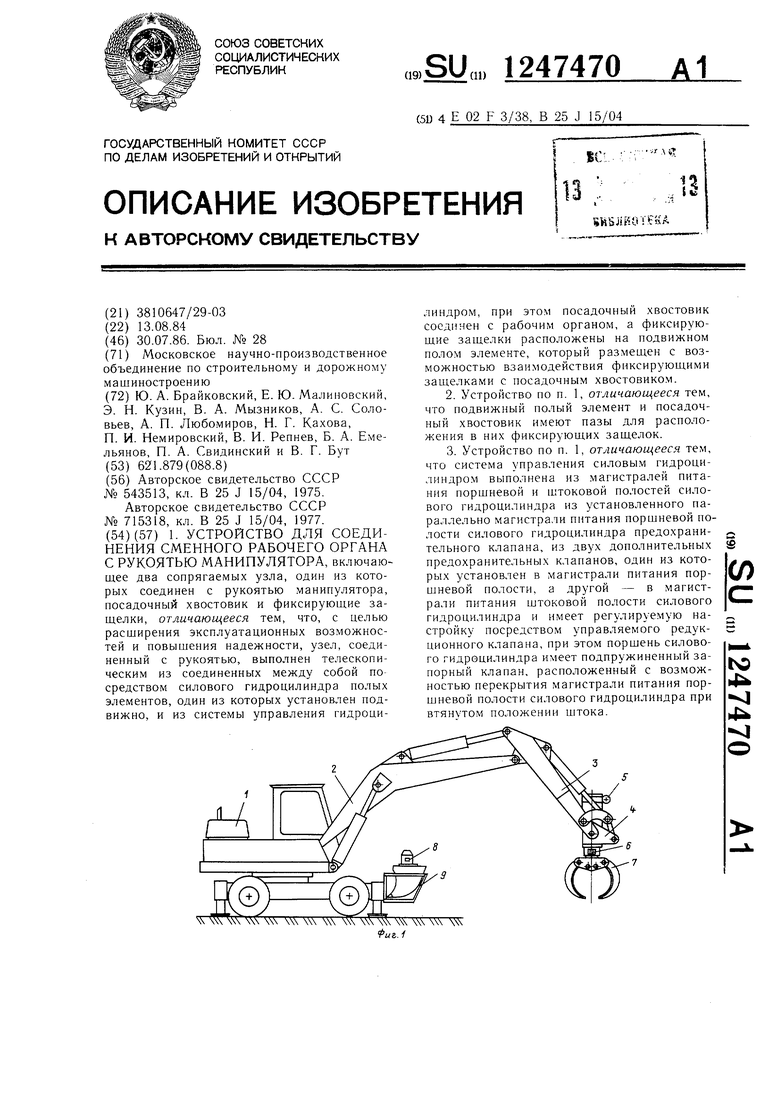
На фиг. 1 изображен экскаватор-манипулятор, вид сбоку; па фиг. 2 - устройство для соединения рабочего органа с рукоятью манипулятора и схема системы управления; на фиг. 3 - схема взаимодействия элементов устройства при втянутом штоке; на фиг. 4 - то же, при отсоединении рабочего органа от устройства.
Экскаватор-манипулятор (фиг. 1) содержит базовую машину 1, стрелу 2, рукоять 3 вилочного типа, внутри которой на цапфах установлена телескопическая рукоять 4 с механизмом вращения вокруг продольной оси 5, стыковочным устройством б для неподвижного соединения со сменными рабочими органами, например грейфером 7, ковшом 8 или другими органами.
На ходовой раме машины 1 расположены кассеты 9 для храпения сменных рабочих органов, которыми могут быть схваты для круглых или плоских изделий, ножницы для обрезки арматуры, трамбовки и другие органы.
Устройство 6 для стыковки (соединения) сменного рабочего органа является частью телескопической рукояти 4 (фиг. 2), неподвижная труба 10 которого крепится в рукояти 3, а подвижная труба 11 (например, квадратного сечения) имеет возможность выдвигаться на скользунах 12 с помощью силового гидроцилиндра,закрепленного корпусом 13 на неподвижной трубе 10, шток 14 которого соединен с проушиной 15 подвижной трубы 11. Поршень 16 силового гидроцилиндра снабжен подпружиненным запорным клапаном 17, который во втянутом положении штока 14 перекрывает сливную магистраль поршневой полости, имеющую параллельную ветвь и установленный на ней предохранительный клапан 18. На торце рабочих органов 7, 8 и других имеется посадочный хвостовик 19 с конической заход- ной частью для соединения с подвижной трубой 11.
Четкость и надежность фиксации обеспечивается фиксирующими заш.елками 20, которые установлены у наружного торца подвижной трубы 11, и вводится пружинами 21 в прорези 22, выполненные на поверхности посадочного хвостовика 19 и подвижной трубы П. Нрофиль зашелок 20 и координаты осей их крепления обеспечивают при действии растягивающих усилий самозакли- ниваиие защелок в прорезях 22. Для размыкания защелок служат упоры 23 (буртики) по торцовой поверхности неподвижной трубы 10.
Для поступательного перемещения рабочего органа силовой гидроцилиндр 13 телескопической рукояти 4 подключен к насосу 24 через трехпозиционный гидрораспределитель 25, например, с дистанционным гидравлическим управлением. Для ограничения ве. личины усилия, действующего па шток 14
во время работы, в магистрали питания включены предохранительные клапаны 26 и 27, причем клапан 27 выполнен с управляе- .JЙ (от редуцирующего клапана 28) настройкой. Нри этом мап ияист включает
клапан 28 педальным рычагом управления. С помощью клапана 29 осуществляется подключение распределителя 25 к блоку управления или к редуцирующему клапану 28 Клапан с управляемой настройкой 27 имеет первоначальную настройку, меньшую или
равную настройке клапана 18, а максимальную - при включении редуцирующего клапана управления 28 - (U - 1,2) K,;FJ, где К(г - отно;пение площадей порцп)евой и штоковой полостей силового
0 гидроцилипдра; Pi - давление настройки клапана 18.
Устройство работает следующим образом. Перемещение элементов рабочего оборудования (стрелы 2, рукояти 3, телескопической рукояти 4) мащинист располагает
5 подвижную трубу 11 телескопического механизма над хвостовиком 19 сменного рабочего органа, расположенного в кассете 9 или па грунте.
С помощью гидроцилиндра 13 подачей жидкости в поршневую по;1ость осущест вляется выдвижение штока 14 и вместе с ним подвижной трубы 11, которая центрирует посредством скосов хвостовика 19 продольную ось стыкуемого рабочего органа. По мере выдвижения трубы 11 фиксирую- П1ие защелки расходятся и в момент сов падения прорезей 22 хвостовика и подвижной трубы с выступами защелок 20 пружины 21 перемещают защелки вовнутрь прорезей. Происходит фиксация рабочего орг-апа на рукояти 4 манипулятора. Положение пор0 П1НЯ кожет бытЕз произвольным.
В процессе вьп1О.лнения рабочих операций при движении 14 силового гидроцилиндра осуществляется поступательное пере.мсицение рабочего органа в пределах хода пc)pIПFlя 16. Ход поршня с одной сто5 роны определяется упором в переднюю крышку силового гидроцилипдра, а с другой - момепт{)м перекрытия запорпы.м клапапо.м 17 (фиг. 3) магистрали питания (слива) поршневой полости, подк. иочеиной к зад.чей
крышке 1-идроцилиндра. 0
В полости гидроцилиндра, расположенной между задней крышкой и nopnjHCM 16, во время рабочих движений после перекрытия клапаном 17 сливного отверстия при подключенной к насосу магистрали питапия 5 цггоковой полости появляется давлепие, определяемое первоначальной настройкой клапана 27, а поскольку оно по |)инятым условиям работы меньше давлепия настройки
клапана 18, поршень 16 имеет четкую границу остановки.
Величина fo (фиг. 3) «нерабочей зоны хода поршня 16 определяется величиной перемеш,ения подвижной трубы 11 относительно неподвижной 10, необходимой для выталкивания фиксирующих защелок 20 из пазов 22.
Для расстыковки телескопической рукояти 4 со сменным органом машинист с помощью редуцирующего клапана {фиг. 4) увеличивает давление управления клапаном 27 с управляемой настройкой. При этом автоматически увеличивается давление в магистрали питания штоковой полости гидроцилиндра и в поршневой.
Клапан 18 открывается пропуская жидкость из поршневой полости гидроцилиндра на слив через открытый (благодаря одновременной подаче давления управления через клапан 29) гидрораспределитель 25, и порщень перемещается до упора в заднюю крышку. Во время движения поршня и связанной с ним подвижной трубы,11 телескопа фиксирующие защелки 20 касаются упоров 23, скользят по их направляющим в сторону от центра трубы, выходят из паза 22 и освобождают рабочий орган 7.
Применение изобретения расщиряет эксплуатационные возможности экскаватора, повышает его надежность при работе со сменными рабочими органами.
15
Фиг.г
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод рабочего оборудования одноковшового экскаватора | 1986 |
|
SU1313979A1 |
| Гидравлический привод рабочего оборудования одноковшового экскаватора | 1980 |
|
SU949091A1 |
| ГИДРОПРИВОД УПРАВЛЕНИЯ РАБОЧИМИ ОРГАНАМИ МАНИПУЛЯТОРА | 1992 |
|
RU2039172C1 |
| ГРУЗОПОДЪЁМНАЯ СТРЕЛА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2240973C2 |
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |
| Рабочее оборудование одноковшового гидравлического экскаватора | 1986 |
|
SU1399402A1 |
| МОЛОТ МАА ДЛЯ РАЗРУШЕНИЯ НЕГАБАРИТОВ ГОРНЫХ ПОРОД | 2002 |
|
RU2237808C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| ГИДРОСИСТЕМА | 2014 |
|
RU2591373C2 |
| Гидропривод землеройной машины | 1980 |
|
SU1036862A1 |
Фиг.
| Стыковочное устройство | 1975 |
|
SU543513A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для стыковки сменного инструмента с кистью исполнительного органа манипулятора | 1977 |
|
SU715318A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
