1
Изобретение относится к манипуля торам и может быть использовано в лесной промышленности на заготовке леса.
Известны манипуляторы, включающие колонну, на которой шарнирно смонтированы поворотные стрела и рукоять с рабочим органом, две шарнирно-сочлененные тяги, соединяющие стрелу с рукоятью, и гидропривод с гидроцилиндрами поворота стрелы, рукояти и рабочего органа l.
Недостатком данного манипулятора является то, что при его работе необходимо управлять несколькими гидроцилиндрами одновременно. Например, при наводке рабочего органа управляют гидроцилиндрами стрелы, рукояти и рабочего органа. Кроме того такие манипуляторы испытывают большие динамические нагрузки при пакетировании деревьев.
Известен также манипулятор, включаиощий колонну, на которой шарнирно
смонтированы поворотные стрела и рукоять с рабочим органом, две шарнирно-сочлененные тяги, соединяющие стрелу с рукоятью, и гидропривод с. гидроцилиндром поворота стрелы, гидроцилиндром поворота рукояти, шток которого соединен с осью шарнирного соединения тяг, и гидродилиндром поворота рабочего органа 2.
Однако такой манипулятор сложен в управлении и испытывает большие динамические нагрузки при пакетировании падающего дерева, так как в начальный период пакетирования, когда дерево не имеет больших углов и угловой скорости поворота от вертикали, производится ускоренный подьем с одновременным подтаскиванием значительной части массы дерева; Вследствие сложности управления снижается возможность автоматизации работы манипулятора.
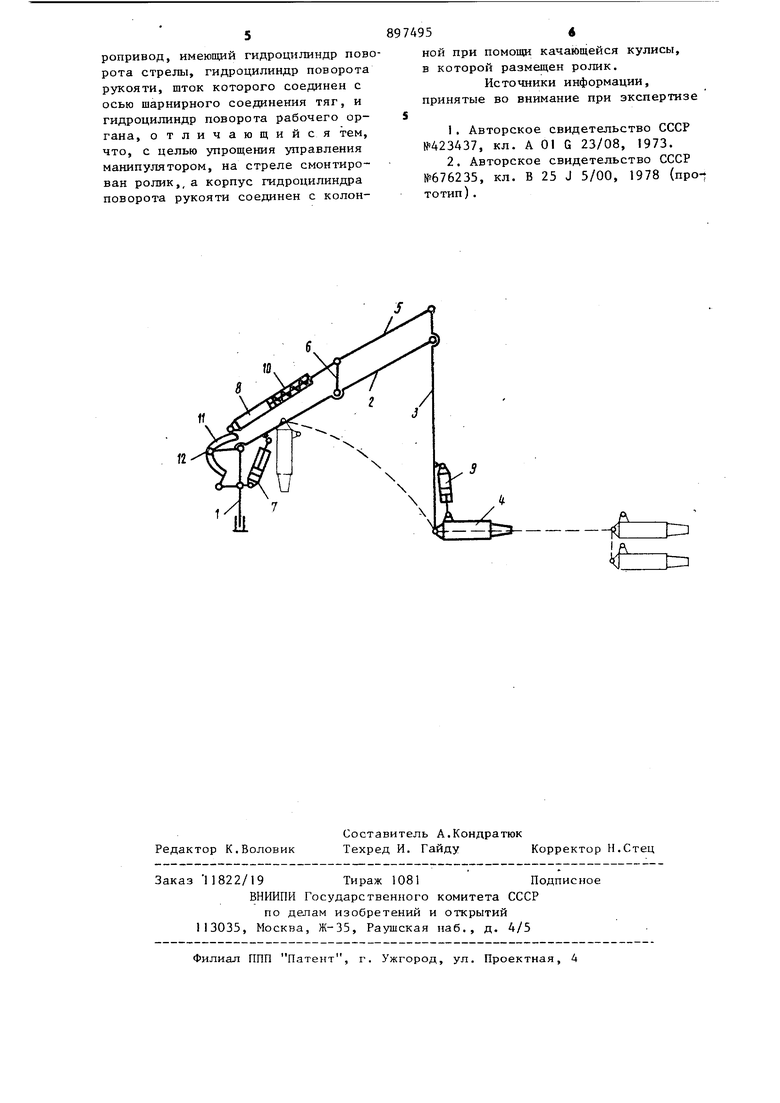
Цель изобретения - упрощение управления манипулятором. Цель достигается тем, что на стреле смонтирован ролик, а корпус гидроцилиндра поворота рукояти соединен с колонной при помощи качающейся кулисы, в которой размещен ролик. На чертеже изображена кинематическая схема манипулятора. Манипулятор содержит колонну 1, на которой шарнирно смонтированы поворотные стрела 2, рукоять 3 с рабочим органом 4, две шарнирно-со члененные тяги 5 и 6, соединяющие стрелу с рукоятью, и гидропривод с гидродилиндром 7 поворота стрелы, гидроцилиндром 8 поворота рукояти .и гидроцилиндром 9 поворота рабочего органа. Шток гидроцилиндра 8 поворота РУ1СОЯТИ подпружинен относительно его корпуса при помощи пружины 10, усилие сжатия которой рассчитано на удержание максимального дерева и соединен с осью шарнирного соединения тяг 5 и 6. Корпус гид роцилиндра 8 поворота рукояти соеди нен с колонной 1 при помощи качающейся кулисы , в которой установлен ролик 12, смонтировалный на стреле 2. Манипулятор работает следуюащм образом. Включением штоковой полости гидроцилиндра 7 при плавающем положени гидроцилиндра 8, производится поворот стрелы 2 и опускание рукояти 3 с рабочим органом 4. В начале поворота стрелы 2 ролик 12 перемещается по круговой части кулисы 11, которая остается неподвижной и через рычажную систему, состоящую из гидроцилиндра 8, тяг 5 и 6 и ру кояти 3, заставляет перемещаться рабочий орган 4 по круговой траекто рии до некоторой высоты над поверх ностью земли. В этот момент ролик 12 перемещается по криволинейной части кулисы 11, которая поворачивается и при повороте заставляет рабочий орган 4 перемещаться над поверхностью земли на постоянной вы соте, за счет конфигурации криволи нейной части кулисы. Одновременно включением гидроцилиндра 9 устанав ливается в горизонтальное положени рабочий орган 4, который после упора в захватываемый объект, например дерево, охватывает его без зажима. 4 При дальнейшем повороте стрелы 2. и кулисы 11 пружина 10 сжимается, а рабочий орган 4 скользит по стволу дерева вниз до упора. Сжатая пружина 10 создает направленный натяг ствола дерева. После отделения ствола дерева от пня включением поршневой полости гидроцилиндра 7 производится перемещение комлевой части ствола в направлении, обратном направлению наводки, в приемное устройство машины. Одновременно гидроцилиндр 9 переводят в плаваю- . щее положение для обеспечения свободного падения дерева в направлении натяга его ствола пружиной 1.0. В начале падения дерева, когда его угол и угловая скорость поворота от вертикали небольшие, комлевая часть дерева перемещается параллельно поверхности земли, а в конце падения, когда угол и угловая скорость поворота дерева от вертикали достигают значительных величин, по круговой траектории комлевой части, т.е. производится подъем с одновременным подтаскиванием комлевой части дерева. Такое перемещение комлевой части дерева позволяет значительно снизить динамические нагрузки на манипулятор. Кроме того, упрощается управление процессом пакетирования дерева, так как при этом не включается гидроцилиндр 8 поворота рукояти, который используется для установки манипулятора в транспортное положение и на других работах, например, для сбора поваленных деревьев. Эффективность предлагаемого манипулятора состоит в снижении динамических нагрузок на манипулятор, упрощении управления процессом пакетирования деревьев и обеспечении возможности автоматизации этого процесса. Использование предлагаемого манипулятора позволяет повысить производительность и уменьшить металлоемкость манипулятора. Формула изобретения Манипулятор, включаю1ций колонну, на которой шарнирно смонтированы стрела и рукоять с рабочим органом, две шарнирно-сочлененные тяги, соединяющие стрелу с рукоятью, и гидропривод, имеющий гидроцнлиндр поврота стрелы, гидроцилиндр поворота рукояти, шток которого соединен с осью шарнирного соединения тяг, и гидроцилиндр поворота рабочего органа, о тличающийся тем, что, с целью упрощения управления манипулятором, на стреле смонтирован ролик,, а корпус гидроцилиндра поворота рукояти соединен с колон974954
ной при помощи качающейся кулисы, в которой размещен ролик.
Источники информации, принятые во внимание при экспертизе S
1.Авторское свидетельство СССР №423А37, кл. А 01 G 23/08, 1973.
2.Авторское свидетельство СССР №676235, кл. В 25 J 5/00, 1978 (прототип) .

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления манипулятором | 1980 |
|
SU884997A1 |
| Система управления манипулятором | 1981 |
|
SU990503A2 |
| Манипулятор лесозаготовительной машины | 1979 |
|
SU791517A1 |
| Манипулятор лесозаготовительной машины | 1978 |
|
SU676235A1 |
| МАНИПУЛЯТОР МАШИНЫ ДЛЯ ОБРАБОТКИ ДЕРЕВЬЕВ | 2003 |
|
RU2242115C2 |
| Лесозаготовительная машина | 1987 |
|
SU1442134A1 |
| Стволовая буропогрузочная машина | 1982 |
|
SU1078078A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
| МАНИПУЛЯТОР МАШИНЫ ДЛЯ ОБРАБОТКИ ДЕРЕВЬЕВ | 2003 |
|
RU2251479C2 |
| МАНИПУЛЯТОР | 2005 |
|
RU2296042C2 |
W
