Изобретение относится к области автоматики и измерительной техники.
Известны схемы электромеханических устройств для выработки модуля и аргумента вектора но его составляющим, содержащие следящие системы выработки аргумента и модуля, выполненные в виде трансформаторов, подключенных через соответствующие усилители к исполнительным двигателям, роторы которых кинематически связаны с роторами трансформаторов и шкалами аргумента и модуля.
В этих устройствах добротность следящс системы аргумента зависит от величины модуля. Если модуль вектора меияегся в широки.х пределах, то при малых значениях модуля добротность следящей системы а pry.мента понижается настолько, что следянхая система становится «вялой и значительно увеличивается ошибка измереиия аргумента.
Для автоматической регулировки добротности следящей системы аргумента известна автоматическая регулировка усиления (АРУ) усилителя, входящего в эту следящую систему. Однако АРУ усложняет усилитель, делает его менее надежным. Кроме того, наличие в одном устройстве разных усилителей неудобно или невыгодно.
сти следящей системы аргумента, позволяющего унифицировать усилители следящих систем модуля и аргумента.
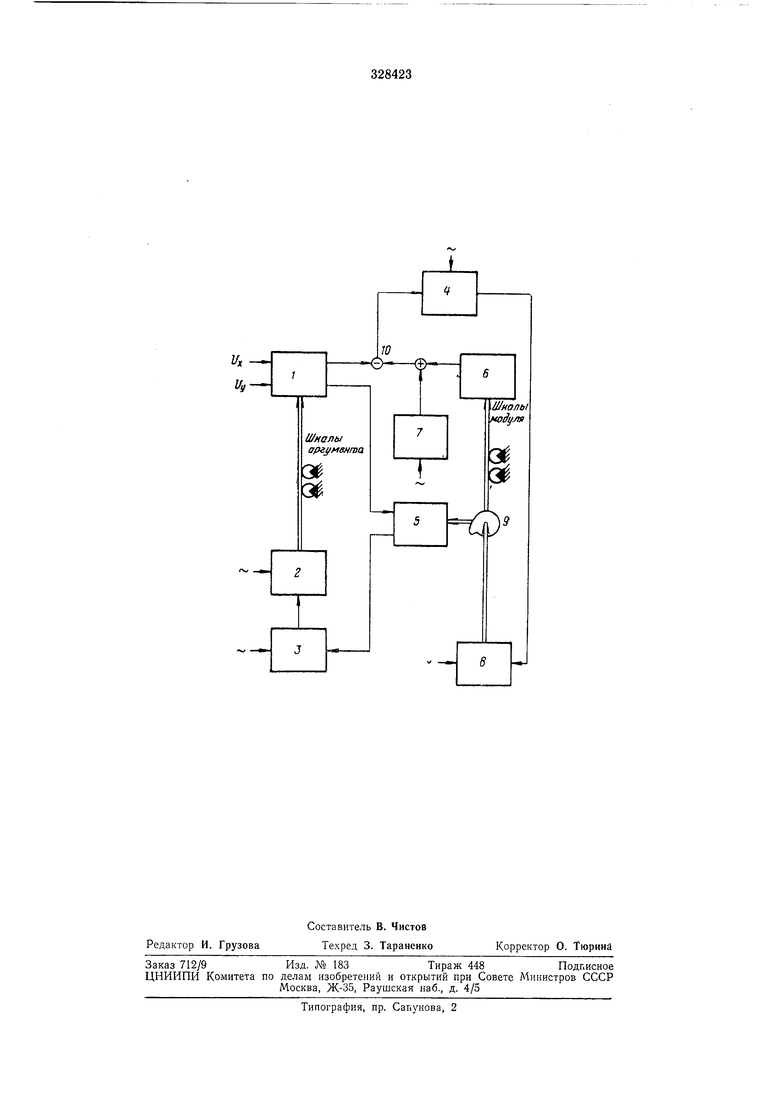
Это достигается тем, что в контур следящей системы аргумента введен элемент автоматической регулировки добротности, например вращающийся трансформатор или потенциометр, связанный с валом отработки следящей системы модуля через эксцентриковый механизм, причем вход элемента автоматической регулировки добротности подключен к выходу сипуспо-косинусиого трансформатора, а выход - к усилителю следяиюй системы выработки аргумеига.
При повороте вала следян1ей системы модуля па угол, пропорциональный величине модуля, этот вранхающийся трансформатор иоворачивается на такой угол, что его передаточный коэфф щиепт становится обратно нроиорциопальным величине модуля.
Во многих случаях можно обойтись и без эксцеитрика, связывая вращающийся трансформатор обычной передачей со следящей системой модуля, если использовать участок косинусной зависимости выходного сигнала ВТ, в той или иной стеиенн нрнближающейся к гиперболе, или профильный нотенциометр. Схема содержит: сиаусно-косинусиый вращающийся трансформатор 1, раЬотающии в режиме лостронтеля вектора; исполнительный двигатель 2 следящей системы выработки аргумента; усилитель 3 следящей системы выработки аргумента; усилитель 4 следящей системы выраиотки модуля; элемент о автоматической регулировки добротности следящей системы выработки аргумеита, иаиример Ы; линейный вращающийся трансформатор Ь, яв.1яющийся элементом обратной связи следящей системы выработки модуля; смещающий трансформатор 7 для расщирения зоны линейности ЛБТ с 60 до исполнительный двигатель 6 следящей системы выработки модуля; кулачковый механизм У и схему W сравнения. Синусно-косинусный вращающийся трансформатор 1, работающий в режиме построителя вектора, электрически связан с устройством, выдающим напряжения, пропорциональные ортогональным составляющим некоторого вектора. Синусная обмотка трансформатора 1 через элемент 5 автоматической регулировки добротности подключена к в.ходу усилителя 3. Ьыход усилителя .;; подсоединен к обмотке управления двигателя 2, который через редуктор связан с ротором трансформатора 1. Сигнал с косинусной обмотки трансформатора 1 поступает в схему 10 сравнения с сигналом трансформатора 6. Разность напряжений с косинусной обмотки трансформатора 1 и с трансформатора о подается на вход усилителя 4. Выход усилителя 4 иодключен к обмотке управления двигателя 8, который механически связан с ротором трансформатора 6 и через кулачковый механизм 9 с элементом 5 автоматической регулировки добротности. Усилитель 3 и двигатель 2 образуют следящую систему выработки аргумента, а трансформатор 6 со смещающим трансформатором /, усилитель 4 и двигатель 8 - следящую систему выработки модуля. Устройство работает следующим образом. При подаче на векторный построитель напряжений Ux и С/у, иропорциональных составляющим вектора, в векторном построителе индуктируется магнитный ноток, величина которого определяется по формуле Ф /(Ф YUI + U,(1) где Кф - учитывает коэффициент трансформации трансформатора 1 и связь между размерностями напряжения и магнитного потока. Направление магнитного нотока определяется по формуле P :arctg-|:.(2) где /Си - учитывает связь между размерностями магнитного потока и напряжения;а - угол поворота ротора векторного построителя от нулевого положеФ - угол, определяющий направление магнитного потока в векторном построителе. При малых ф-а формулу (3) можно переписать в виде /1 С„-Ф(ср-а),(4) Подставляя в выражение (4) выражение (1) получим U, K, + Ul-(-a.).(5) Так как yfJ + y есть модуль вектора, передаточный коэффициент синусной обмотки векторного построителя - 1 -к- .1.Л/ „„rz- „.ф,/62 + 2(6) (р - апрямо пропорционален величине измеряемого модуля. Напряжение с синусной обмотки векторного построителя через элемент 5 автоматической регулировки добротности поступает на усилитель 3. С выхода усилителя напряжение прикладывается к обмотке управления двигателя 2. Двигатель 2 поворачивает ротор векторного построителя до тех пор, пока напряжение, индуктируемое в синусной обмотке, не станет равным нулю, т. е. пока синусная обмотка не встанет в положение, перпендикулярное направлению магнитного потока Ф(). При этом в косинусной обмотке векторного построителя, которая совпадает с направлением магнитного потока, индуктируется напряжениеи, + и1,(7) где Ят - коэффициент трансформации векторного построителя. Разность напряжения С/2 и напряжения с трансформатора 6 подается на усилитель 4, выход которого подключен к обмотке управления двигателя 8. Двигатель 8 вращает ротор трансформатора 6 до тех пор, пока напряжение, снимаемое с него, не станет равным напряжению t/2. А так как связь между выходным напряжением трансформатора 6 и углом поворота его вала линейная, вал поворачивается на угол, пропорциональный модулю вектора. Элемент 5 автоматической регулировки добротности связан с двигателем 8 через эксцентрик, профиль которого рассчитан таким образом, что при повороте вала двигателя на угол, пропорциональный модулю вектора, ротор трансформатора поворачивается на угол, обратно пропорциональный модулю
l/ZJf+7 О или /f/2 + близко к нулю, так как при этом угол поворота должен стремиться к бесконечности. Для этих случаев профиль эксцентрика отклоняется от закона обратной пропорциональности.
Таким образом, при повороте вала двигателя 8 на угол, пропорциональный / з ,
у эле мента автоматической регулировки добротности передаточный коэффициент обратно
пропорционален контуре следящей системы аргумента одно звено (синусная обмотка векторного построителя) имеет передаточный коэффициент, пропорциональный /U -}-Uy, другое звено элемент автоматической регулировки добротности - передаточный коэффициент, обратно пропорциональный к л + У других звеньев этого контура (усилитель 3, двигатель 2) передаточные коэффициенты не зависят . Следовательно, добротность этой следящей системы в определенном диапазоне изменения модуля не зависит от его величины.
Предмет изобретения
Электромеханическое устройство для выработки модуля и аргумента вектора, содержащее следящие системы выработки аргумента и модуля, выполненные соответственно в виде синусно-косинусного вращающегося трансформатора и линейного вращающегося трансформатора, подключенных через соответствующие
усилители к исполнительным двигателям, роторы которых кинематически связаны соответственно с роторами вращающихся трансформаторов и шкалами аргумента и модуля, отличающееся тем, что, с целью повышения точности работы устройства, оно содержит элемент автоматической регулировки добротности, например вращающийся трансформатор, механически связанный через эксцентриковый механизм с валом двигателя следящей системы выработки модуля, причем вход элемента автоматической регулировки добротности подключен к выходу синусно-косинусного трансформатора, а выход - к усилителю следящей системы выработки аргумента.