
| название | год | авторы | номер документа |
|---|---|---|---|
| Имитационный стенд линейных ускорений | 1990 |
|
SU1720024A1 |
| МЕХАНИЗМ (ВАРИАНТЫ) | 1996 |
|
RU2121093C1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820105A1 |
| СПОСОБ ОБРАЗОВАНИЯ МАХОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ МАШУЩЕГО ВИНТА | 2010 |
|
RU2482010C2 |
| Роторная машина | 1990 |
|
SU1751407A1 |
| ПЛАНЕТАРНЫЙ РЕДУКТОР С ДВУМЯ СООСНЫМИ ВЫХОДНЫМИ ВАЛАМИ ПРОТИВОПОЛОЖНОГО ВРАЩЕНИЯ | 2016 |
|
RU2729324C2 |
| УДВОИТЕЛЬ ЧАСТОТЫ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2002 |
|
RU2238154C2 |
| Металлорежущий станок | 1977 |
|
SU704756A1 |
| НЕФРИКЦИОННАЯ ЗУБЧАТО-ЭКСЦЕНТРИКОВАЯ ОБГОННАЯ МУФТА | 2022 |
|
RU2782057C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ШАШКИНА С РЕГУЛИРОВАНИЕМ СКОРОСТИ ВРАЩЕНИЯ | 1996 |
|
RU2115808C1 |
Изобретение относится к аппаратуре испытаний и калибровки приборов, измеряющих ускорение, и может быть использовано для имитации линейных ускорений в системах моделирования. Целью изобретения является увеличение диапазона имитируемого вектора ускорений. Имитационный стенд линейных ускорений содержит вращающуюся платформу 1 с приводом 2 поворотного стола 3. На столе размещен испытуемый акселерометр 10. На платформе 1 соосно водилу 5 закреплена шестерня 6, связанная зубчатой передачей с передаточным отношением 2 сателлитом 7. При повороте водила 5 приводом 2 на некоторый угол относительно платформы 1 против часовой стрелки стол 3 с акселерометром 10 поворачивается на некоторый угол. При этом горизонтальная ось стола при любых его положениях пересекает ось вращения платформы. В стенде вертикальные оси вращения стола и платформы находятся на равном расстоянии от вертикальной оси вращения водила. 2 ил.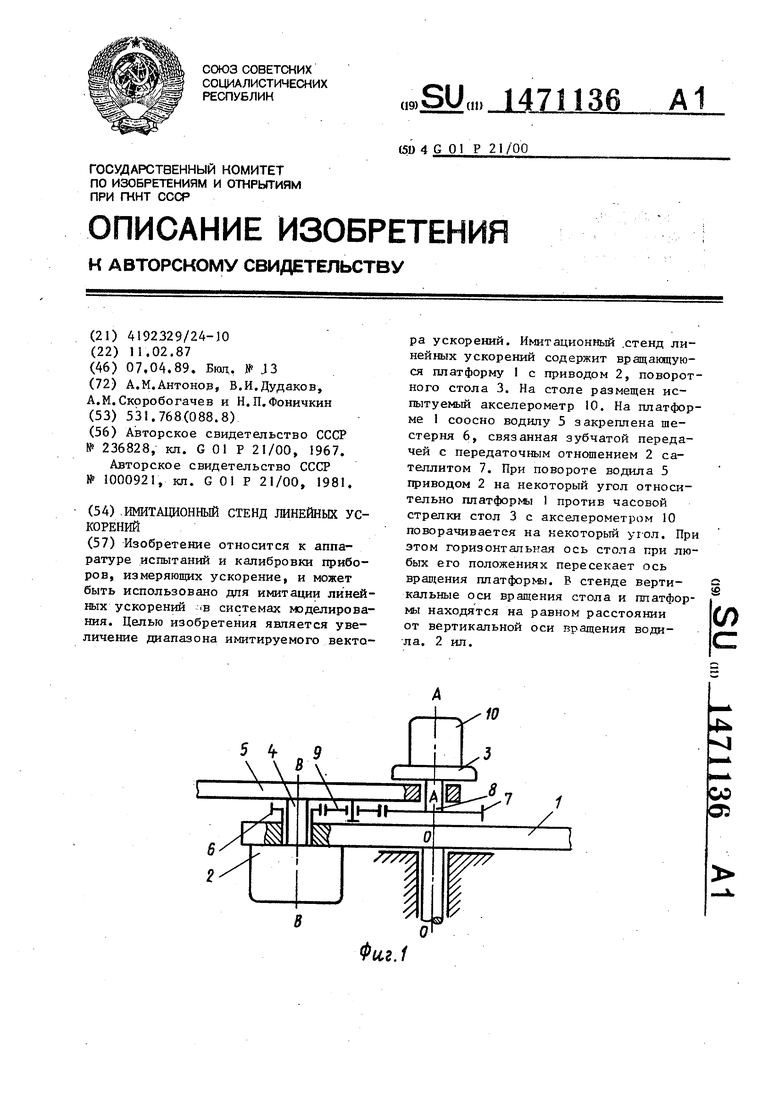
00
а:
Фи.г.1
114
Ияобрете1те относится к аппаратуре испытаний и калибровки приборов и устройств, измеряющих ускорения, и южет быть использовано для имитации линейных ускорений в системах юдeлиpoвaниЯo
Цель изобретения - увеличение диапазона имитируемого вектора ускореН1-1Й,
На фиг, 1 и 2 показана упрощенная кинематическая схема предлагаемого стенда.
Стенд содержит вращагадуюся вокруг вертикальной оси платформу 1 (фиг.I) на которой устаношен привод 2 поворотного стола 3; с выходным валом 4 привода 2 жестко связано водило 5. На платформе I соосно водилу 5 закреплена шестерня б, на вОдиле 5 свободно установлен сателлит 7, жестко связанный валом 8 с поворотным столом 3. Сателлит 7 и шестерня б рнематически стзязапы между собой промежуточным зубчатым колесом 9, От ношение числа зубьев (Z(.) сателлита 7 к числу зубьев (Z, ) шестерни б рав
V
но 1 -- 2, Оси вращения 0-0 и А-А
ш соответственно 1шатс|юрмы 1 к стола 3
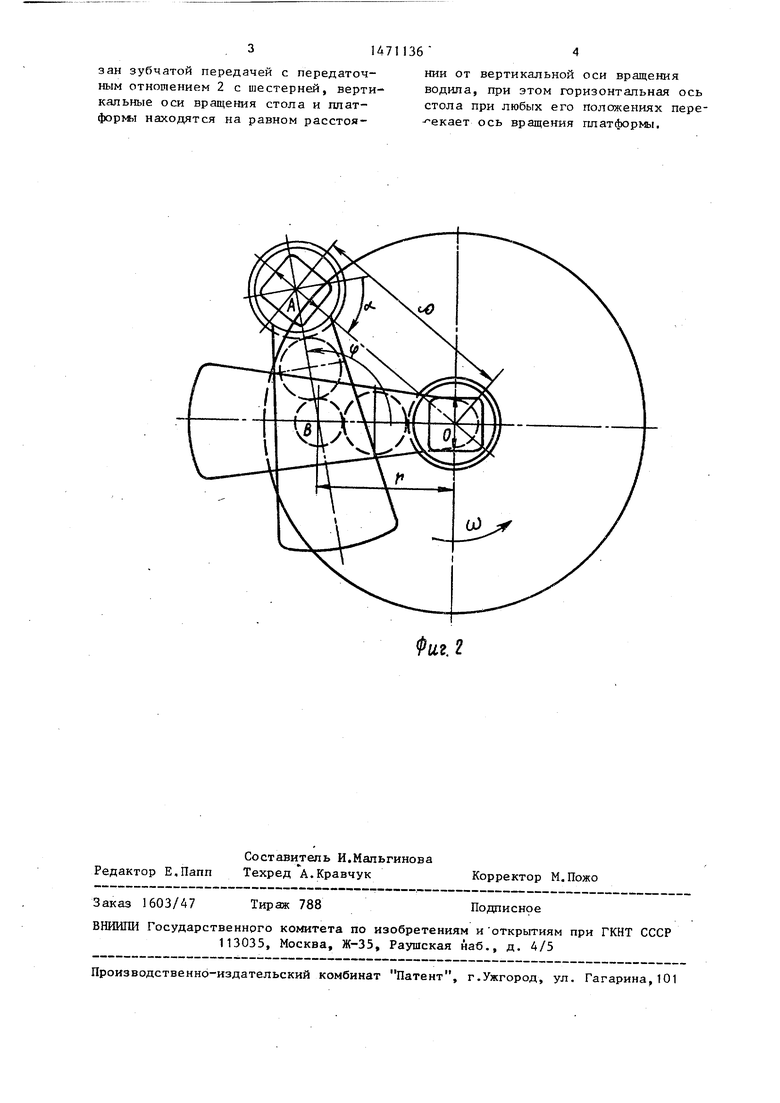
параллелым оси вращения В-В водшта 5 и равноудалены от нее, т,е. г (фиг, 2),
На поворотном столе 3 крепнтсус испытуемое изделие, например акселерометр 10,так5 что центр массы его чувствительного элемента совпадает с осью А-А, а ось чувствительности параллельна горизонтальной оси стола 3 и платформе 1 и в начальный исходный момент (когда А-А совпадает с 0-0) лерпендикулярна радиусу АВ (показана двойной стрелкой на фиг. 2),
При повороте воддпа 5 приводом 2 на угол, (ср) относительно платфортФ 1 против часовой cтpeJIки (показано тонкими лишшыи, фиг, 2) вследствие кинематической связи сателлита 7 с йшстерней б посредством проме хуточно го зубчатого колеса 9 стол 3 с аксел рометром ГО поворачивается на угол (сЬ) относительно водила 5 по часовой стрелке. Так как OB AE--rj то тре- уголытак ОБА будет равнобедренным, а
-1. Ze Р
так как г- - -2, то уголЫ. - и
ось чувствительности ((1зиг 2, двои - Haj стрелка, совпадающая с горизонтальной осью стола 3) акселерометра
d
5 0 5
о
г
5
5
0
0
362
Ю будет всегда направлена по основанию ОА треугольника ОБА,
Таким образом, при наличии вращения платформ, 1 с заданной угловой скоростью (о) акселерометр 10 измеряет полный модуль ускорения (фиг,2):
о22 (РпtP
) АБ2 sin | 2ur.sin| ,
и боковая составляющая ускорения отсутствует, так как ось чувствительности акселерометра 10 пересекает ось вращения .0-0 платформь 1.
В мехатшзме привода стола отсутствуют встречно движущиеся узлы, поэто- ьгу водд-шо 5 может поворачиваться как против, так и по часовой стрелке относительно щ-левого положения (фиг.2), с1юрмируя при этом центростремительные , во 3 дей ст ву ющи е н а и спыт уе мо е изделие, разных знаков, что обеспечивает рааиирение полного д aпaзoнa
имитируе№ х ускоренргй от sin ™
2
до -20 г sin - 5 где Q o - максимальный угол поворота водила 5.
Стенд имеет простую конструкцию, так как на платформе 1 установлены только три подвижных узла: водило 5; стол 3 с сателлитом 7 и промежуточное зубчатое колесо 9, А так как перемеи енке узлов относительно ллат- 4юрмь и друг друга только вращательное, то они легко балансиру1отся при сборке стенда; поэтому в процессе его работы при любой угловой скорости платформы 1 и любом положении стола. 3 разбалансировки платфор№1 1 не происходит и момент от центробежных сил узлов, приведенный к валу 4 двигателя нрнвода 2, всегда равен нулю.
Формула изобретения
Имитационньй стенд линейных ус- корешда, содержащий вращающуюся щгат- ф/орму с приводом и с размещенным на ней с возможностью вращения стол с иcпытye s,м изделием, о т л и ч а- ю вд и и с я тем, что, с целью увеличения диапазона имитируемого вектора ускорений, в него введен механизм двойного поворота стола относительно платформы, выполненный в- виде водила, сателлита и шестерни, причем.шестерня закреплена на платформе соосно водилу, сателлит установлен на водила соосно столу и связан зубчатой передачей с передаточным отношением 2 с шестерней, вертикальные оси вращения стола и ллат- находятся на равном расстоянии от вертикальной оси вращения водила, при этом горизонтальная ось стола при любых его положениях пере- - екает ось вращения платформы.
Фиг, 2
| 0 |
|
SU236828A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Центробежный стенд | 1981 |
|
SU1000921A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
