Изобретение относится к системам гидроавтоматики и может быть использовано в механическом оборудовании гидросооружений.
Целью изобретения является уменьшение динамических нагрузок и повышение эффективности привода в работе.
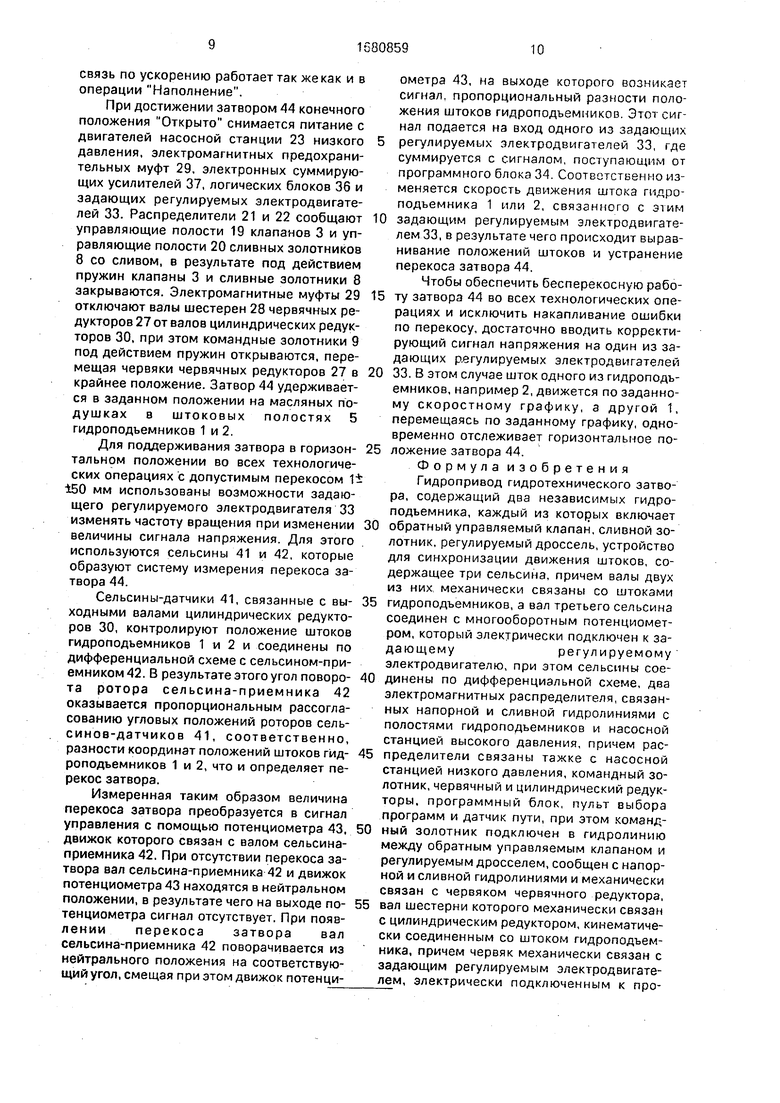
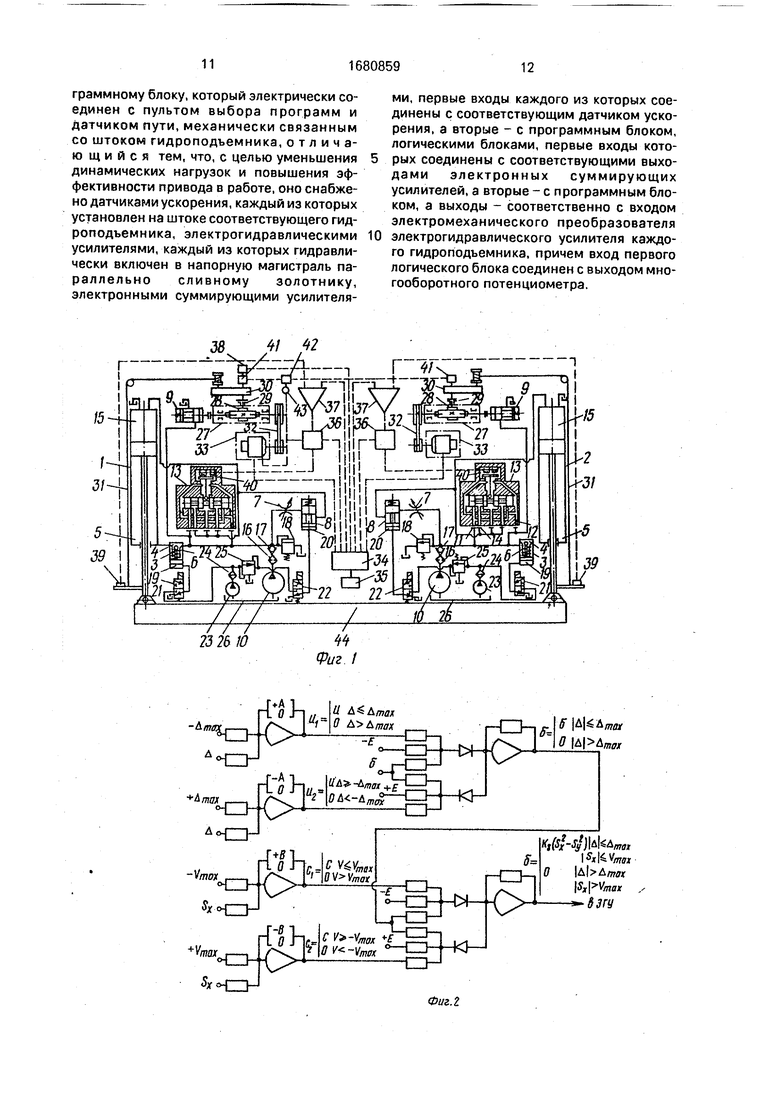
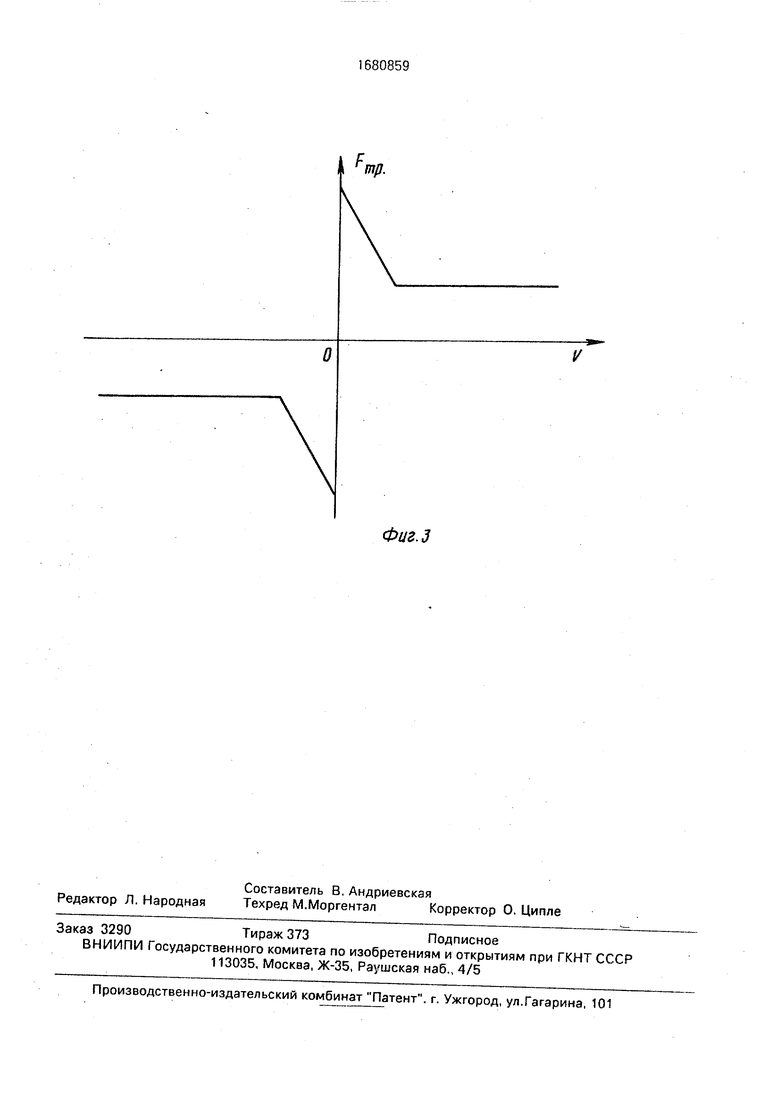
На фиг.1 дана принципиальная электрогидравлическая схема гидропривода гидротехнического затвора; на фиг.2 - схема логического блока; на фиг.З - падающая характеристика суммарной силы трения.
Гидропривод гидротехнического затвора включает два независимых гидроподъемника 1 и 2, каждый из которых содержит обратный управляемый клапан 3, нэдклапанная полость 4 которого гидравлически соединена со штоковой полостью 5 гидроподъемников. Подклапанная полость 6 клапана 3 гидравлически соединена с регулируемым дросселем 7, сливным золотником 8, командным золотником 9, насосной станцией 10 высокого давления и полостями питания 11 и управления 12 электрогидравлического усилителя 13, три сливные полости 14 которого объединены и через поршневую полость 15 гидроподъемников соединены со сливом.
В насосную станцию 10 высокого давления включены фильтр 16, обратный клапан 17 и предохранительный клапан 18. Управляющая полость 19 обратного управляемого
ОС
клапана 13 и управляющая полость 20 сливного золотника 8 подключены гидравлически к электромагнитным распределителям 21 и 22, к которым подводится рабочая жидкость от насосной станции 23 низкого давления, к которой подключены фильтр 24 и напорный золотник 25, поддерживающий установленное давление рабочей жидкости. Питание насосных станций 10 и 23 осуществляется от баков 26. Шток командного золотника 9 соединен с червяком червячного редуктора 27, вал шестерни 28 которого механически соединен через электромагнитную предохранительную муфту 29 с выходным залом цилиндрического редуктора 30, связанного троссовой передачей 31 со штоком гидроподъемников 1 и 2.
Червяк червячного редуктора 27 посредством механической передачи 32 связан с валом задающего регулируемого Электродвигателя 33, который электрически подключен к программному блоку 34, электрически связанному с пультом 35 выбора программ, с первыми входами логических блоков ЗЬ и электронных суммирующих усилителей 37 и датчиком 38 пути,
Вторые входы электронных суммирующих усилителей 37 электрически соединены С датчиками 39 ускорения, установленными на штоках гидроподъемников 1 и 2, а выход - со вторыми входами логических блоков 36, выходы последних соединены с электромеханическими преобразователями 40 электрогидравлических усилителей 13.
В схему также включены два сельсина- датчика 41, валы которых механически связаны с выходными валами цилиндрических редукторов 30. Сельсины-датчики 41 электрически по дифференциальной схеме соединены с сельсином-приемником 42, вал которого соединен механически с движком потенциометра 43, который подключен к одному из задающих регулируемых электродвигателей 33 и одному из логических блоков 36.
Штоки гидроподъемников 1 и 2 шарнир- но соединены с затвором 44, поршневые полости 15 fидроподъемников - со сливом.
Гидропривод гидротехнического затвора работает следующим образом.
При шлюзовании судов гидропривод гидротехнического затвора выполняет следующие технологические операции: подъем затвора в положение Наполнение, подъем затвора в положение Закрыть ; опускание затвора в положение Открыть.
Подъем затвора в положение Наполнение.
8 гидромеханизмах шлюзов требуется осуществлять медленные технологические
перемещения рабочего органа - затвора 44 (например, в технологической операции подъем затвора в положение Наполнение скорость движения может устанавливаться
от 0,2 до 0,8 м/мин), При этом имеет место трение скольжения, а характеристика силы трения FTp - падающая (см. фиг.З). Как показали экспериментальные исследования, проведенные на Киевском шлюзе, в указан0 ном режиме возникают релаксационные ав- 1 околебания, т.е. периодическое чередование этапов движений с остановками (скачки).
Отношение максимальной скорости
5 /макс скачка к заданной скорости /3 движения затвора составляет 3-6, при этом перегрузки на каждом штоке гидроподъемника составляют 3 000-5 000 кГс.
Эта операция осуществляется по одно0 му оптимальному скоростному графику (программе).
При повороте ключа, соответствующего определенному графику наполнения, а количество графиков и законы перемещения
5 затвора 44 для разных шлюзов выбираются исходя из конкретных условий (на пульте управления 35), подается питание на электродвигатели насосных станций Ю.электро- магнитные предохранители муфты 29, электрон0 ные суммирующие усилители 37 и логические блоки 36. Рабочая жидкость от насосных станций 10 подается в напорную магистраль и через открытые командные золотники 9 - на слив (в бак 26). С выдержкой времени 2-3
5 с (время необходимое для разворота насосов станций 10) подается питание на задающие регулируемые электродвигатели 33, которые приводят во вращение с заданной скоростью червяки червячных редукторов
0 27, которые, вворачиваясь в зубья неподвижных шестерен 28, сдвигаются в продольном направлении и прикрывают командные золотники 9. Слив рабочей жидкости через золотники 9 уменьшается, и рабочая жид5 кость-из напорной магистрали поступает через обратные управляемые клапаны 3, которые под воздействием давления жидкости открываются в штоковые полости 5 гидроподъемников 1 и 2, приводя в движение
0 затвор 44, Одновременно жидкость из напорной гидролинии поступает в полости пита н. и я 11 и управления 12 электрогидравлических усилителей 13, удерживая их золотники в среднем положе5 нии.
По мере движения затвора 44 валы шестерен 28 червячных редукторов 27 начнут вращаться посредством цилиндрических редукторов 30, связанных со штоками гидроподъемников 1 и 2 тросовой передачей
31. Если скорость движения затвора соответствует скорости вращения задающих регулируемых электродвигателей 33 командные золотники 9 будут находиться в определенном положении, при этом в редукторах 27 будет происходить обкатывание зубьев шестерен 28 и червяков червячных редукторов 27.
При изменении скорости затвора 44 по отношению к заданной червяки червячных редукторов 27 будут перемещаться вдоль продольных осей, изменяя при этом положение командных золотников 9. Если скорость затвора станет меньше заданной, скорости вращения валов шестерен 28 редукторов 27 также уменьшатся и червяки червячных редукторов 27 будут перемещаться на прикрытие золотников 9. Если скорость затвора 44 увеличится по отношению к заданной, соответственно увеличатся и обороты валов шестерен 28 червячных редукторов 27, которые переместят червяки червячных редукторов 27 на открытие золотников командных 9.
Одновременно по мере движения затвора 44 с программного блока 34 сигнал напряжения S2x поступает на входы электронных суммирующих усилителей 37, как сигнал заданного ускорения перемещения затвора 44, где алгебраически суммируется с сигналом S у, поступающим от датчиков 39 ускорения. С электронных суммирующих усилителей 37 результирующий сигнал напряжения 6 - Ks (Sx2-Sy ) поступает на первый вход логического блока 36, на второй вход которого поступает сигнал от программного блока 34 задающей скорости Sx, а на третий вход логического блока 36 гидроподъемника 1 - сигнал разности координат штоков гидроподъемников 1 и 2 A от многооборотного потенциометра 46. На третий вход логического блока 36 гидроподъемника 2 подается опорное напряжение, которое имитирует условие I AI Дмакс и не препятствует прохождению сигнала б на электромеханические преобразователи 40 электрогидравлических усилителей 13 при выполнении условия ISXI VMSKC.
Гидроподъемник 2 не принимает участия в выравнивании перекоса затвора 44 и Д поэтому все время равно 0, а это условие будет всегда запирать логический блок 36 и будет помехой для прохождения сигнала д , поэтому и выдается опорное напряжение, имитирующее условие I Л Дмакс на третий вход логического блока 36 гидроподъемника 2.
При УСЛОВИИ |Д| Дмакс И |Sx| VMaKc
сигнал д Ks(Sx2-Sy2), подавляющий релаксационные автоколебания, проходит через логический блок 36 и поступает на злектро- 5 механические преобразователи 40 электрогидравлических усилителей 13, золотник которого, открываясь, отводит часть жидкости из напорной магистрали через полости питания 11 и слива 14 и 15 на слив, умень- 0 шая при этом ускорение затвора 44 в каждой фазе движения.
В начале каждой фазы движения (скачка) ускорение, а следовательно, и динамическая перегрузка наштоке
5 гидроподъемников максимальная. В этот момент разница (S2x-S2y) заданного и фактического ускорений является максимальной. Сигнал Ks (Sx S у) подается на вход суммирующего усилителя 37, а затем с соот0 ветствующей полярностью через логические блоки 36 - на электромеханические преобразователи 40 злектрогидравличе- ских усилителей 13 так, что слив части подачи насосов 10 увеличивается, в
5 гидроподъемники 1 и 2 поступает меньшая подача, давление в штоковой полости 5 гидроподъемников уменьшается, т.е. уменьшается усилие на поршне, а следовательно, и ускорение штока и присоединенного к нему
0 затвора 44.
Интенсивность скачка (максимальная амплитуда скорости) в каждом этапе существенно уменьшается. При оптимальном подборе параметров явление релаксацион5 ных автоколебаний полностью сглаживается. Поскольку механическая система, образованная подвеской затвора шарнирно на штоках двух гидроподъемников, способствует независимости характеров движения
0 каждого штока друг от друга, наличие и параметры релаксационных автоколебаний при движении каждого из штоков также практически независимы. Поэтому система обратной связи по ускорению, образован5 пая в изобретении, сочетанием предлагаемых устройств должна быть использована в приводе каждого гидроподъемника.
При достижении затвором 44 конечного положения Наполнение одновременно
0 снимается питание с электродвигателей насосов 10, задающих регулируемых электродвигателей 33, электромагнитных муфт 29, электронных суммирующих усилителей 37 и логических блоков 36. Обратные управляе5 мые клапаны 3 под действием пружин и давления рабочей жидкости в штоковых полостях 5 гидроподъемников 1 и 2 закрываются, командные золотники 9 под действием пружин открываются, смещая червяки
червячных редукторов 27 в продольном направлении, так как валы шестерен 28 червячных редукторов 27 отключаются Электромагнитными муфтами 29 от цилиндрических редукторов 30. Затвор 44 удерживается в заданном положении на масляных подушках в штоковых полостях 5 гидроподъемников.
Подъем затвора в положение Закрыть,
Эта операция осуществляется по одному оптимальному скоростному графику (программе),
На пульте управления 35 (см. фиг.1) включается ключ операции Закрыть. В дальнейшем принцип работы гидропривода гидротехнического затвора такой же, как и При технологической операции Наполнение, за тем исключением, что в работу включаются соответствующие насосы станции 10, обеспечивающие максимальную скорость движения затвора 44 в данной операции.
Опускание затвора в положение Открыть.
Эта операция осуществляется по одному оптимальному скоростному графику (программе).
При повороте ключа Открыть на пульте 35 управления (см. фиг.1) подается питание на электродвигатели насосных станций 23 низксГго давления, электромагнитные распределители 21 и 22, электромагнитные предохранительные муфты 29, электронные суммирующие усилители 37, логические блоки 36 и задающие регулируемые элект- р|эдвигатели 33, которые в этой операции реверсируются, т.к. направление вращения выходного вала цилиндрического редуктора 30 меняется. Рабочая жидкость от насосной станции 23 низкого давления через распределители 21 и 22 поступает к управляющим полостям 19 управляемых клапанов 3 и уп- рЈвляющим полостям 20 сливных золотников 8, которые открываются и рабочая жидкость из штоковых полостей 5 гидроподъемников вытесняется под действием силы тяжести затвора и проходит через клапаны 3, регулируемые дроссели 7, сливные золотники 8 в поршневые полости 15 гидроподъемников 1 и 2. Так как при опускании затвора 44 увеличивающийся объем жидкости в поршневых полостях 15 гидроподъемников больше, чем объем жидкости, вытесняемый из штоковых полостей 5, за счет объема занимаемого штоками, для полного заполнения поршневых полостей 15 к ним подключена гидролиния, по которой производится питание рабочей жидкостью из бака 26.
Дроссели 7 служат для предварительной установки вручную заданной скорости движения затвора 44, Точное поддержание заданной скорости движения затвора осуществляется автоматически командными золотниками 9, на которые воздействуют продольно перемещающиеся червяки червячных редукторов 27. Точная скорость затвору задается частотой вращения червяка
червячного редуктора 27, приводимого во вращение задающим регулируемым электродвигателем 33. Если скорость движения затвора станет меньше заданной (например, увеличение вязкости рабочей жидкости
при понижении температуры наружного воздуха, уменьшение веса затвора по мере погружения его в воду и т.д.), соответственно уменьшится частота вращения валов шестерен 28 и червяки из червячных
редукторов 27, выворачиваясь из зубьев шестерен 28, приоткрывают командные золотники 9, увеличив слив рабочей жидкости из штоковых полостей 5 гидроподъемников, повысив тем самым скорость опускания затвора 44,
При увеличении скорости движения затвора по отношению к заданной шестерни 28 червячных редукторов 27 сместят вдоль продольной оси червяки, уменьшив слив рабочей жидкости через золотники 9, в результате скорость движения затвора уменьшится. Если скорость движения затвора будет соответствовать заданной, в червячных редукторах 27 будет происходить
обкатывание зубьев шестерен и червяков и червяки будут находиться в неподвижном положении, неподвижными будут и командные золотники 9.
Во время опускания затвора 44 насоспая станция 23 низкого давления находится в работе для удержания обратных управляемых клапанов 3 и сливных золотников 8. Так как объем управляющих полостей 19 клапанов 3 и управляющих полостей 20
5 сливных золотников 8 ограничен и после прекращения перемещения их подвижных частей увеличиваться не будет, для предотвращения разрушения насосов, трубопроводов и гидроэлементов в напорной
0 магистрали установлен напорный золотник 25, предназначенный для поддержания установленного давления рабочей жидкости в системе и слив расхода насосной станции 23 в бак 26.
5 Операция Открыть осуществляется со скоростями, при которых отсутствуют релаксационные автоколебания, однако в случае снижения скорости до появления релаксационных автоколебаний обратная
связь по ускорению работает так же как и в операции Наполнение.
При достижении затвором 44 конечного положения Открыто снимается питание с двигателей насосной станции 23 низкого давления, электромагнитных предохранительных муфт 29, электронных суммирующих усилителей 37, логических блоков 36 и задающих регулируемых электродвигателей 33. Распределители 21 и 22 сообщают управляющие полости 19 клапанов 3 и управляющие полости 20 сливных золотников 8 со сливом, в результате под действием пружин клапаны 3 и сливные золотники 8 закрываются. Электромагнитные муфты 29 отключают валы шестерен 28 червячных редукторов 27 от валов цилиндрических редукторов 30, при этом командные золотники 9 под действием пружин открываются, перемещая червяки червячных редукторов 27 в крайнее положение. Затвор 44 удерживается в заданном положении на масляных подушках в штоковых полостях 5 гидроподъемников 1 и 2.
Для поддерживания затвора в горизон- тальном положении во всех технологических операциях с допустимым перекосом 1t 150 мм использованы возможности задающего регулируемого электродвигателя 33 изменять частоту вращения при изменении величины сигнала напряжения. Для этого используются сельсины 41 и 42, которые образуют систему измерения перекоса затвора 44.
Сельсины-датчики 41, связанные с вы- ходными валами цилиндрических редукторов 30, контролируют положение штоков гидроподьемников 1 и 2 и соединены по дифференциальной схеме с сельсином-приемником 42. В результате этого угол поворо- та ротора сельсина-приемника 42 оказывается пропорциональным рассогласованию угловых положений роторов сельсинов-датчиков 41, соответственно, разности координат положений штоков гид- роподьемников 1 и 2, что и определяет перекос затвора.
Измеренная таким образом величина перекоса затвора преобразуется в сигнал управления с помощью потенциометра 43, движок которого связан с валом сельсина- приемника 42. При отсутствии перекоса затвора вал сельсина-приемника 42 и движок потенциометра 43 находятся в нейтральном положении, в результате чего на выходе по- тенциометра сигнал отсутствует. При появлении перекоса затвора вал сельсина-приемника 42 поворачивается из нейтрального положения на соответствующий угол, смещая при этом движок потенциометра 43, на выходе которого возникает сигнал, пропорциональный разности положения штоков гидроподъемников. Этот сигнал подается на вход одного из задающих регулируемых электродвигателей 33, где суммируется с сигналом, поступающим от программного блока 34. Соответственно изменяется скорость движения штока гидроподъемника 1 или 2, связанного с этим задающим регулируемым электродвигателем 33, в результате чего происходит выравнивание положений штоков и устранение перекоса затвора 44.
Чтобы обеспечить бесперекосную работу затвора 44 во всех технологических операциях и исключить накапливание ошибки по перекосу, достаточно вводить корректирующий сигнал напряжения на один из задающих регулируемых электродвигателей 33. В этом случае шток одного из гидроподъемников, например 2, движется по заданному скоростному графику, а другой 1, перемещаясь по заданному графику, одновременно отслеживает горизонтальное положение затвора 44.
Формула изобретения Гидропривод гидротехнического затвора, содержащий два независимых гидроподъемника, каждый из которых включает обратный управляемый клапан, сливной золотник, регулируемый дроссель, устройство для синхронизации движения штоков, содержащее три сельсина, причем валы двух из них, механически связаны со штоками гидроподъемников, а вал третьего сельсина соединен с многооборотным потенциометром, который электрически подключен к задающемурегулируемомуэлектродвигателю, при этом сельсины соединены по дифференциальной схеме, два электромагнитных распределителя, связанных напорной и сливной гидролиниями с полостями гидроподъемников и насосной станцией высокого давления, причем распределители связаны тажке с насосной станцией низкого давления, командный золотник, червячный и цилиндрический редукторы, программный блок, пульт выбора программ и датчик пути, при этом командный золотник подключен в гидролинию между обратным управляемым клапаном и регулируемым дросселем, сообщен с напорной и сливной гидролиниями и механически связан с червяком червячного редуктора, вал шестерни которого механически связан с цилиндрическим редуктором, кинематически соединенным со штоком гидроподъемника, причем червяк механически связан с задающим регулируемым электродвигателем, электрически подключенным к программному блоку, который электрически соединен с пультом выбора программ и датчиком пути, механически связанным со штоком гидроподъемника, отличающийся тем, что, с целью уменьшения динамических нагрузок и повышения эффективности привода в работе, оно снабжено датчиками ускорения, каждый из которых установлен на штоке соответствующего гидроподъемника, электрогидравлическими усилителями, каждый из которых гидравлически включен в напорную магистраль параллельно сливному золотнику, электронными суммирующими усилителя0
ми, первые входы каждого из которых соединены с соответствующим датчиком ускорения, а вторые - с программным блоком, логическими блоками, первые входы которых соединены с соответствующими выходами электронных суммирующих усилителей, а вторые - с программным блоком, а выходы - соответственно с входом электромеханического преобразователя электрогидравлического усилителя каждого гидроподъемника, причем вход первого логического блока соединен с выходом многооборотного потенциометра.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод гидротехнического затвора | 1988 |
|
SU1631114A1 |
| Способ управления и синхронизации движения гидротехнического затвора и устройство для его осуществления | 1988 |
|
SU1617086A1 |
| Гидропривод гидротехнического затвора | 1984 |
|
SU1236208A1 |
| Гидропривод гидротехнического затвора | 1988 |
|
SU1574719A1 |
| Устройство управления гидроприводом затвора шлюза | 1985 |
|
SU1282081A1 |
| Устройство управления гидроприводом затвора шлюза | 1988 |
|
SU1647074A1 |
| Сегментный затвор с системой гидроприводов | 2023 |
|
RU2830615C2 |
| Гидропривод гидротехнического затвора | 1989 |
|
SU1749361A1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1991 |
|
SU1775527A1 |
| Гидропривод гидротехнического затвора | 1984 |
|
SU1234515A1 |
Изобретение относится к системам гидроавтоматики и может быть использовано в механическом оборудовании гидросооружений. Целью изобретения является уменьшение динамических нагрузок и повышение эффективности привода в работе. Устройство содержит два независимых гидроподъемника I и 2, включающих управляемый клапан 3, подклапанная полость 6 которого соединена с регулируемым дросселем 7, насосной станцией 10 и полостью 12 управления электрогидравлического усилителя 13 Управляющие полости 19 и 20 подключены гидравлически к электромагнитным распределителям 21 и 22. Гидропривод также содержит электродвигателе 33, программный блок 34, пульт 35 выбора программ, логические блоки 36 и электронные суммирующие усилители 37 При шлюзовании судов гидропривод выполняет следующие технологические операции: подъем затвора в положение Наполнение, подъем затвора в положение Закрыть, опускание затвора в положение Открыть, которые осуществляются по оптимальному скоростному графику 3 ил.
Г
41 42 ™ mzziiГ 4/
tf/Hjb - Ь 1 лбч зг
-Или J J ||||
&n S .ir.
ft
22 22
/
/ М Фиг /
д си Ллтот
U О
-V/nox
инн
/
Л 2Ь
f О
таи
K,() Wrnn
6 ЗГУ
Фиг.2
Фиг.З
| Гидропривод затвора шлюза | 1984 |
|
SU1208130A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
