t, 4mj и, (4) где ( - значение фазовых сдвигов, при которых напряжения, описываемые выражением (3), принимают максималь- f ные значения, причем и + U 2 +....+ U N 1,
„;. , .uj ЈDi
Важным достоинством метода моментов является простота вычисления л д по N косвенным отсчетам с точностными характеристиками(обратно пропорциональными корню квадратному из N
&,
Ч
CN
Ј Ч
VN
(5)
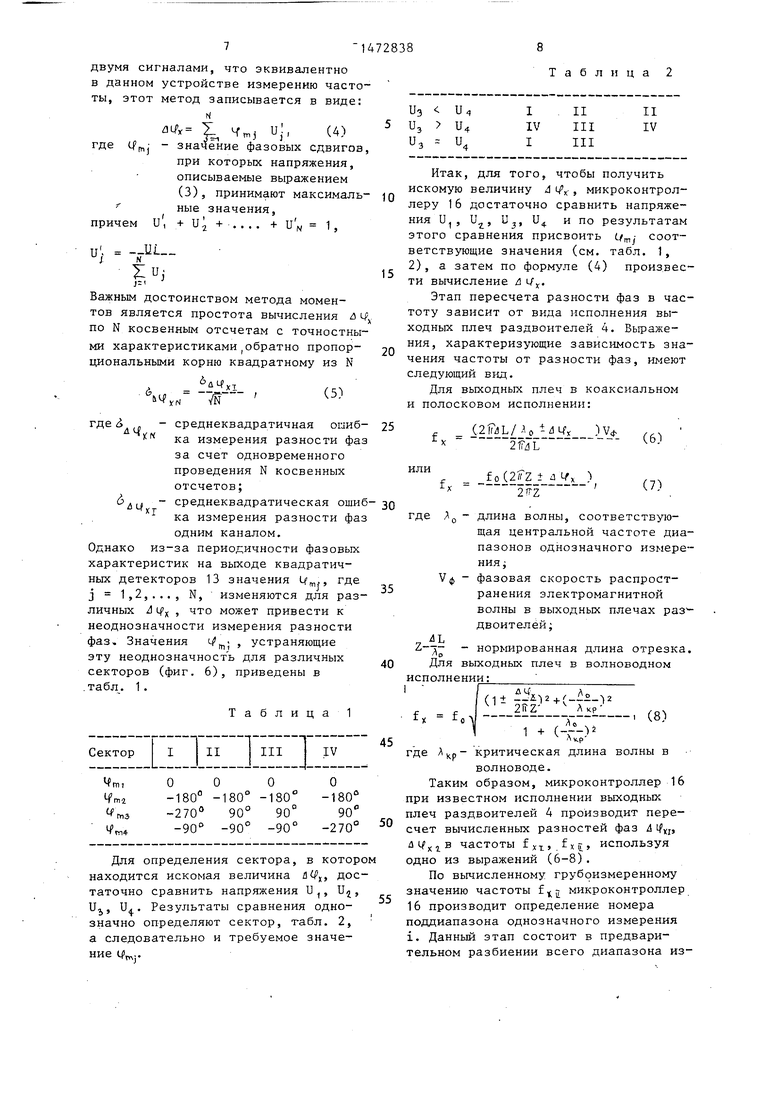
Итак, для того, чтобы получить искомую величину J |Д , микроконтроллеру 16 достаточно сравнить напряжения U1, Uz, U3, U4 и по результатам этого сравнения присвоить t/mj соответствующие значения (см. табл. 1, 2), а затем по формуле (4) произвести вычисление и Ух.
Этап пересчета разности фаз в частоту зависит от вида исполнения выходных плеч раздвоителей 4. Выражения, характеризующие зависимость значения частоты от разности фаз, имеют следующий вид.
Для выходных плеч в коаксиальном и полосковом исполнении:



| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ НЕСУЩЕЙ ЧАСТОТЫ РАДИОСИГНАЛОВ | 1994 |
|
RU2094810C1 |
| Измеритель несущей частоты радиосигналов | 1984 |
|
SU1193596A1 |
| Многокоординатное устройство для управления | 1987 |
|
SU1522155A1 |
| Фазометр | 1985 |
|
SU1273837A1 |
| Способ определения сопротивления изоляции электрических сетей и устройство для его осуществления | 1986 |
|
SU1323984A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2013 |
|
RU2534971C1 |
| Устройство для измерения угловой скорости | 1989 |
|
SU1605776A2 |
| Многокоординатное устройство для управления | 1989 |
|
SU1777121A2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ЛЕЧЕНИЯ СЕРДЕЧНО-СОСУДИСТОЙ СИСТЕМЫ, ДАТЧИК ФАЗ ДЫХАНИЯ ДЛЯ УСТРОЙСТВА ТРЕНИРОВКИ И ЛЕЧЕНИЯ СЕРДЕЧНО-СОСУДИСТОЙ СИСТЕМЫ И СПОСОБ ТРЕНИРОВКИ И ЛЕЧЕНИЯ СЕРДЕЧНО-СОСУДИСТОЙ СИСТЕМЫ | 1992 |
|
RU2049425C1 |
| Устройство для определения среднеквадратического значения переменного сигнала | 1989 |
|
SU1781686A1 |
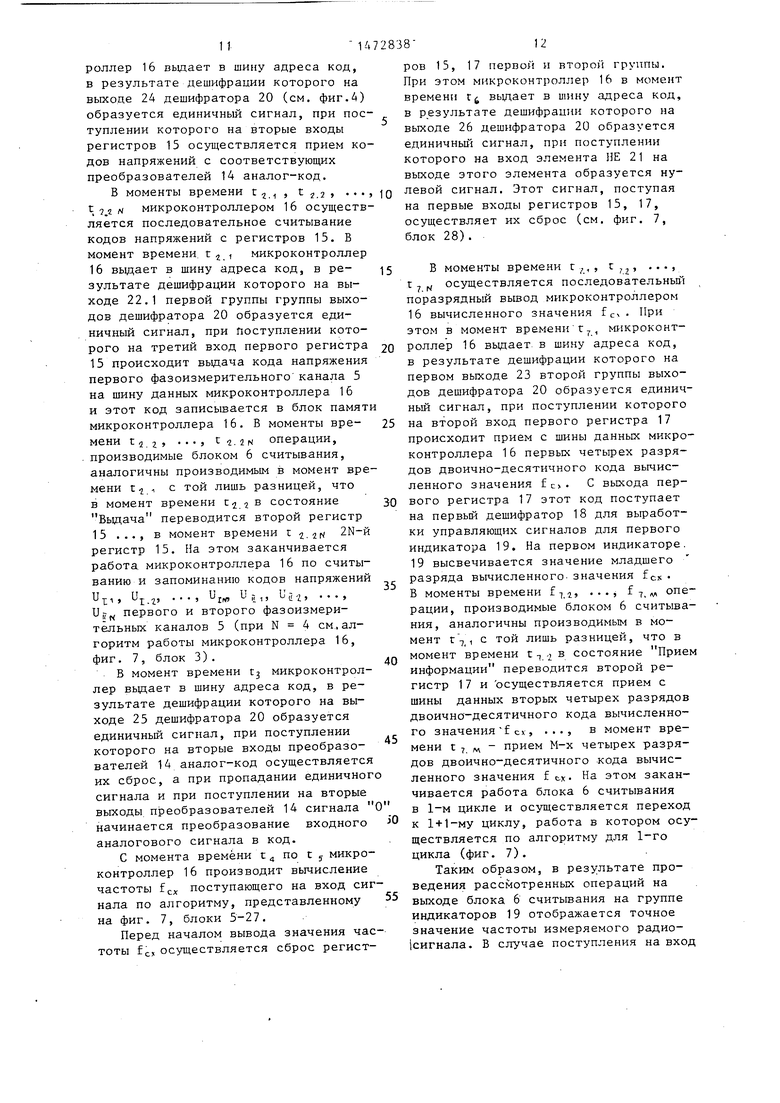
Изобретение относится к измерительной технике и является усовершенствованием изобретения по авт.св.N1193596. Цель изобретения - повышение точности измерения частоты радиосигналов малой мощности. После поступления измеряемого сигнала на вход 1 следящего фильтра 2 сигнал через разветвитель 3 и раздвоители 4 поступает на фазоизмерительные каналы 5, а через N выходов каждого фазоизмерительного канала 5 - на соответствующие входы блока 6 считывания. Следящий фильтр 2 содержит фазовый детектор 7, фильтр 8 нижних частот, управляющий элемент 9, подстраиваемый генератор 10. Каждый фазоизмерительный канал 5 содержит фазораспределитель 11, N двухвходовых сумматоров 12, N квадратичных детекторов. Блок 6 считывания включает в себя 2 N преобразователей 14 аналог - код, 2 N регистров 15, микроконтроллер 16, М регистров 17, М дешифраторов 18, где М - количество разрядов выводимого на индикацию десятичного числа, дешифратор 20, элемент НЕ 21. 2 з.п. ф-лы, 8 ил.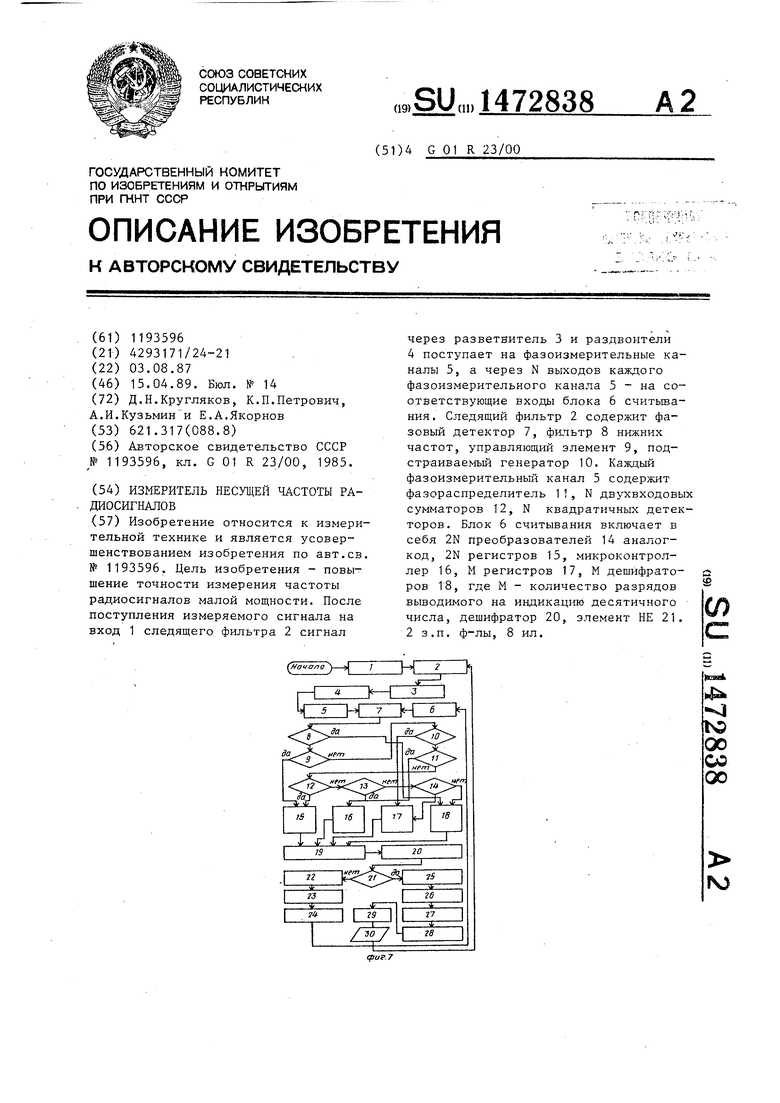
где &
Д Ч
KN
- среднеквадратичная ошиб-
ка измерения разности фаз за счет одновременного проведения N косвенных отсчетов;
&uli среднеквадратическая ошиб ка измерения разности фаз одним каналом.
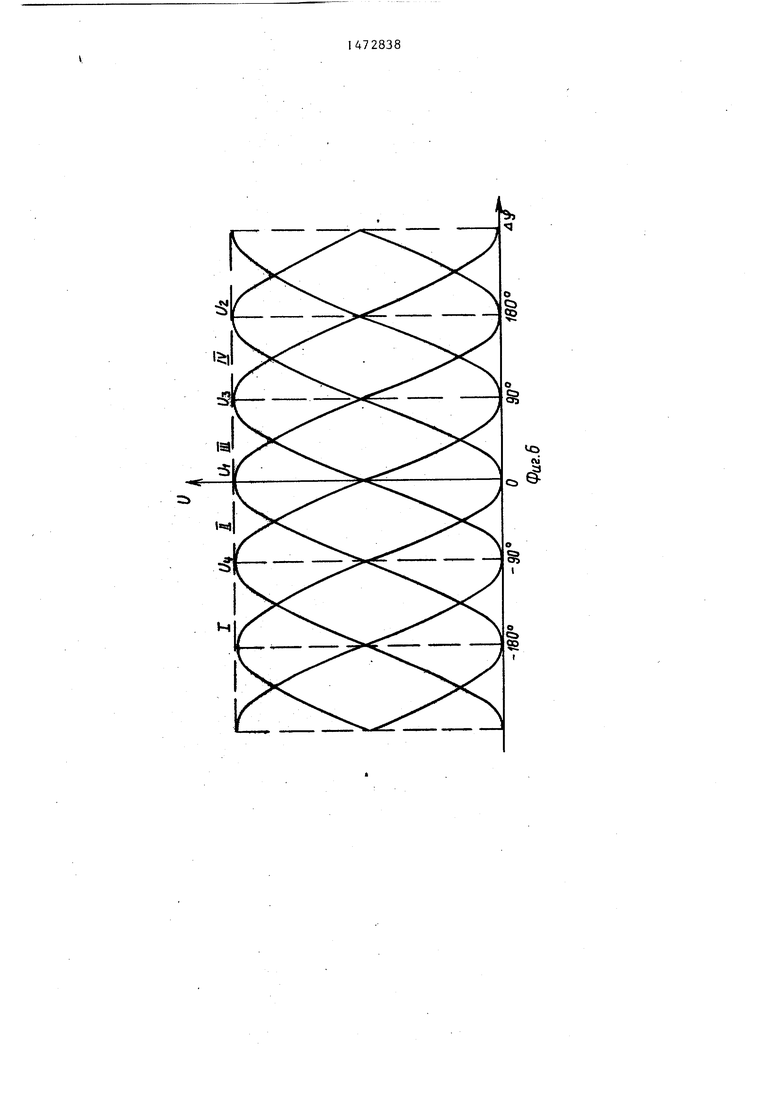
Однако из-за периодичности фазовых характеристик на выходе квадратичных детекторов 13 значения lfmf, где j 1,2,..., N, изменяются для различных Л ifx , что может привести к неоднозначности измерения разности
фаз. Значения м
mi
устраняющие
эту неоднозначность для различных секторов (фиг. 6), приведены в табл. 1.
Таблица 1
Для определения сектора, в котором находится искомая величина достаточно сравнить напряжения U,, Uj, Ui5 U,. Результаты сравнения однозначно определяют сектор, табл. 2, а следовательно и требуемое значение Ц1т..
f
или
fx
)
f о ( ) 2«i
где А0 - длина волны, соответствующая центральной частоте диапазонов однозначного измерения j
Уф - фазовая скорость распространения электромагнитной волны в выходных плечах раз1- двоителей;
7 AL
Z-т- - нормированная длина отрезка.
л о
Для выходных плеч в волноводном исполнении:
I
(8)
где АКр- критическая длина волны в волноводе.
Таким образом, микроконтроллер 16 при известном исполнении выходных плеч раздвоителей 4 производит пересчет вычисленных разностей фаз и Lfw, ДМ хгВ частоты fxx, fXj используя одно из выражений (6-8).
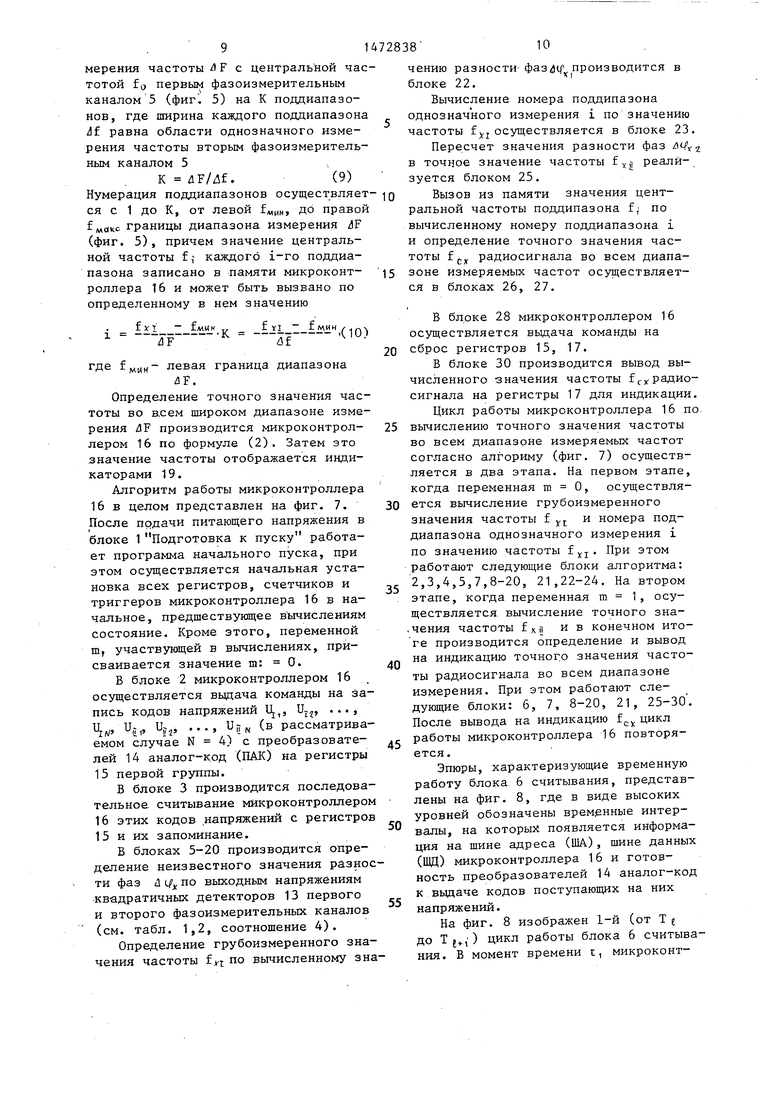
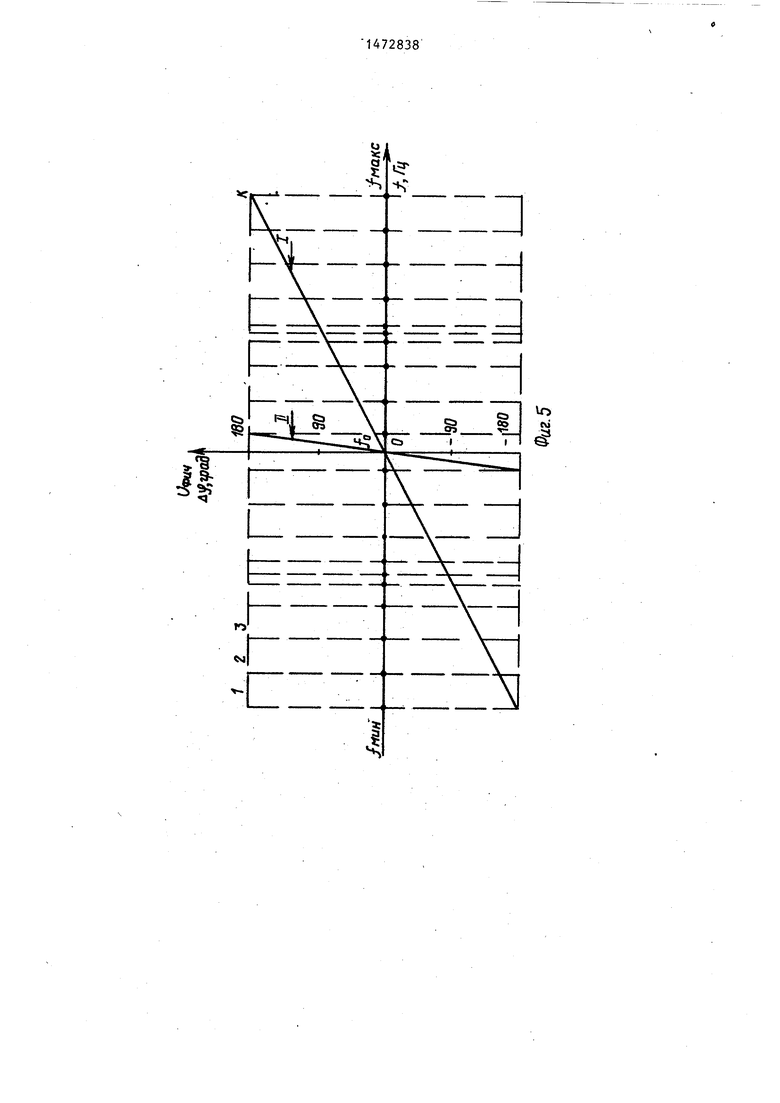
По вычисленному грубоизмеренному значению частоты ftj микроконтроллер 16 производит определение номера поддиапазона однозначного измерения i. Данный этап состоит в предварительном разбиении всего диапазона измерения частоты иF с центральной частотой ft, первым фазоизмерительным каналом 5 (фиг . 5) на К поддиапазонов, где ширина каждого поддиапазона Af равна области однозначного измерения частоты вторым фазоизмерительным каналом 5
К dF/Af.(9)
Нумерация поддиапазонов осуществляется с 1 до К, от левой f/икн, до правой fмакс границы диапазона измерения UF (фиг. 5), причем значение центральной частоты f , каждого 1-го поддиапазона записано в памяти микроконтроллера 16 и может быть вызвано по определенному в нем значению
Ј X I - fMMK „ fyl - f МИН х 1Г.-ч
1 ТЕ К йЈ U°где fMMW- левая граница диапазона 4F.
Определение точного значения частоты во в.сем широком диапазоне измерения /5F производится микроконтроллером 16 по формуле (2). Затем это значение частоты отображается индикаторами 19.
Алгоритм работы микроконтроллера 16 в целом представлен на фиг. 7. После подачи питающего напряжения в блоке 1 Подготовка к пуску работает программа начального пуска, при этом осуществляется начальная установка всех регистров, счетчиков и триггеров микроконтроллера 16 в начальное, предшествующее в гчислениям состояние. Кроме этого, переменной т, участвующей в вычислениях, присваивается значение т: 0.
В блоке 2 микроконтроллером 16 осуществляется выдача команды на запись кодов напряжений Ц,, Un, ,
Чщ U«i U«J U5 (в Рассматрива- емом случае N 4) с преобразователей 14 аналог-код (ПАК) на регистры
15первой группы.
В блоке 3 производится последовательное считывание микроконтроллером
16этих кодов напряжений с регистров 15 и их запоминание.
Б блоках 5-20 производится определение неизвестного значения разности фаз Л (Jx по выходным напряжениям квадратичных детекторов 13 первого и второго фазоизмерительных каналов (см. табл. 1,2, соотношение 4).
Определение грубоизмеренного значения частоты f п по вычисленному значению разности фаз производится в блоке 22.
Вычисление номера поддипазона однозначного измерения i по значению частоты fxi осуществляется в блоке 23. Пересчет значения разности фаз &Щг в точное значение частоты реализуется блоком 25.
Вызов из памяти значения центральной частоты поддипазона f, по вычисленному номеру поддиапазона i и определение точного значения частоты fcx радиосигнала во всем диапа5 зоне измеряемых частот осуществляется в блоках 26, 27.
В блоке 28 микроконтроллером 16 осуществляется выдача команды на
0 сброс регистров 15, 17.
В блоке 30 производится вывод вычисленного значения частоты fr rрадиосигнала на регистры 17 для индикации. Цикл работы микроконтроллера 16 по
5 вычислению точного значения частоты во всем диапазоне измеряемых частот согласно алгориму (фиг. 7) осуществляется в два этапа. На первом этапе, когда переменная m 0, осуществля0 ется вычисление грубоизмеренного значения частоты f Yt и номера поддиапазона однозначного измерения i по значению частоты fxi. При этом работают следующие блоки алгоритма:
5 2,3,4,5,7,8-20, 21,22-24. На втором этапе, когда переменная m 1, осуществляется вычисление точного зна- ,чения частоты fxц ив конечном итоге производится определение и вывод на индикацию точного значения часто0
5
ты радиосигнала во всем диапазоне измерения. При этом работают следующие блоки: 6, 7, 8-20, 21, 25-30. После вывода на индикацию fcx цикл работы микроконтроллера 16 повторяется.
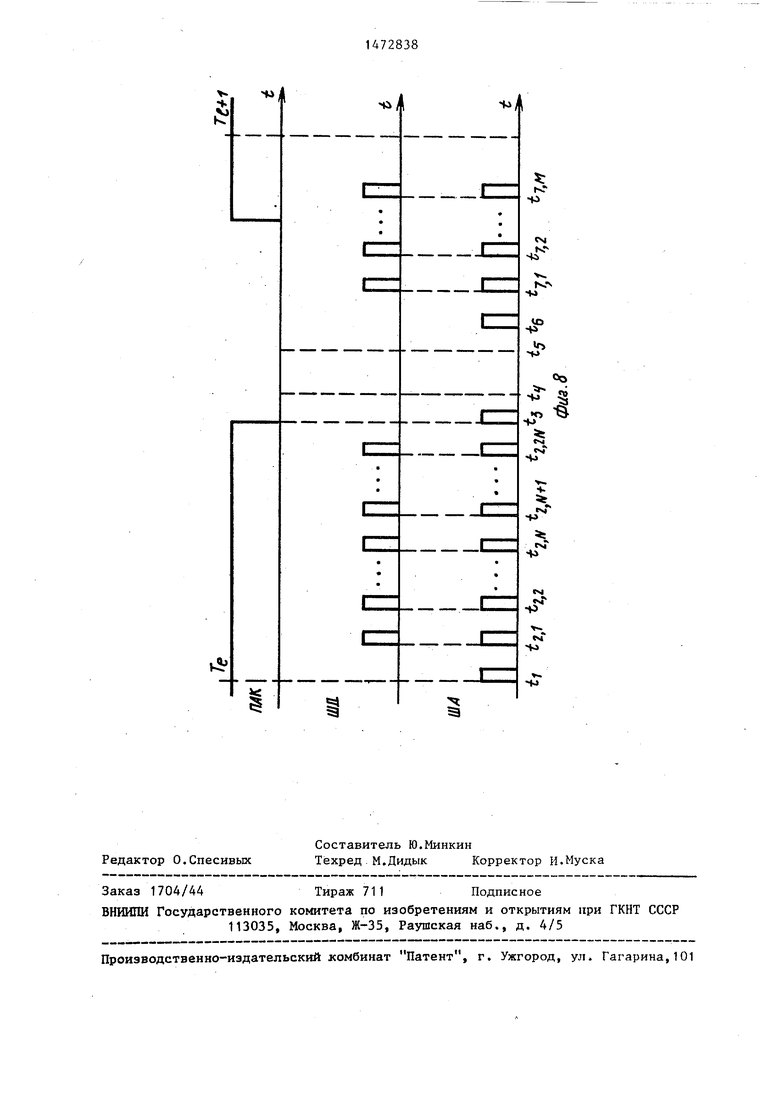
Эпюры, характеризующие временную работу блока 6 считывания, представлены на фиг. 8, где в виде высоких уровней обозначены временные интер- валы, на которых появляется информация на шине адреса (ША), шине данных (ШД) микроконтроллера 16 и готовность преобразователей 14 аналог-код к выдаче кодов поступающих на них напряжений.
На фиг. 8 изображен 1-й (от Т е до Т Ј,.,) цикл работы блока 6 считывания. В момент времени t, микроконт11 14
роллер 16 выдает в шину адреса код, в результате дешифрации которого на выходе 24 дешифратора 20 (см. фиг.4) образуется единичный сигнал, при поступлении которого на вторые входы регистров 15 осуществляется прием кодов напряжений с соответствующих преобразователей 14 аналог-код.
В моменты времени t гм , t г 2 tTJ ц микроконтроллером 16 осуществляется последовательное считывание кодов напряжений с регистров 15. В
16 выдает в шину адреса код, в ре- зультате дешифрации которого на выходе 22.1 первой группы группы выходов дешифратора 20 образуется единичный сигнал, при поступлении которого на третий вход первого регистра 15 происходит выдача кода напряжения первого фазоизмерительного канала 5 на шину данных микроконтроллера 16 и этот код записывается в блок памят микроконтроллера 16. В моменты вре- мени t з г , ..., t 2 2 N операции, производимые блоком 6 считывания, аналогичны производимым в момент времени t , с той лишь разницей, что в момент времени с2 г в состояние Выдача переводится второй регистр 15 ..., в момент времени t 2 art 2М-й регистр 15. На этом заканчивается работа микроконтроллера 16 по считыванию и запоминанию кодов напряжений
тн 1.2 п« ) Ьтц-г, ..., UjfN первого и второго фазоизмери- тельных каналов 5 (при N 4 см,алгоритм работы микроконтроллера 16, фиг. 7, блок 3) .
В момент времени t3 микроконтроллер выдает в шину адреса код, в результате дешифрации которого на выходе 25 дешифратора 20 образуется единичный сигнал, при поступлении которого на вторые входы преобразователей 14 аналог-код осуществляется их сброс, а при пропадании единичног сигнала и при поступлении на вторые выходы преобразователей 14 сигнала начинается преобразование входного аналогового сигнала в код.
С момента времени t4 no t 5 микроконтроллер 16 производит вычисление частоты fcx поступающего на вход сигнала по алгоритму, представленному на фиг. 7, блоки 5-27.
Перед началом вывода значения частоты fсх осуществляется сброс регист
0
12
ров 15, 17 первой и второй группы. При этом микроконтроллер 16 в момент времени г6 выдает в шину адреса код, в результате дешифрации которого на выходе 26 дешифратора 20 образуется единичный сигнал, при поступлении которого на вход элемента НЕ 21 на выходе этого элемента образуется нулевой сигнал. Этот сигнал, поступая на первые входы регистров 15, 17, осуществляет их сброс (см. фиг. 7, блок 28).
В моменты времени г
л
72
17 осуществляется последовательный поразрядный вывод микроконтроллером 16 вычисленного значения fC4. При этом в момент времени г7, микроконтроллер 16 выдает в шину адреса код, в результате дешифрации которого на первом выходе 23 второй группы выходов дешифратора 20 образуется единичный сигнал, при поступлении которого на второй вход первого регистра 17 происходит прием с шины данных микроконтроллера 16 первых четырех разрядов двоично-десятичного кода вычисленного значения fс. С выхода первого регистра 17 этот код поступает на первый дешифратор 18 для выработки управляющих сигналов для первого индикатора 19. На первом индикаторе 19 высвечивается значение младшего разряда вычисленного значения f сх. В моменты времени f1ti, , f 7. w операции, производимые блоком 6 считывания, аналогичны производимым в момент гг, с той лишь разницей, что в момент времени t -, 1 в состояние Прием информации переводится второй регистр 17 и осуществляется прием с шины данных вторых четырех разрядов двоично-десятичного кода вычисленного значения fсх, ..., в момент времени t 1 м - прием М-х четырех разрядов двоично-десятичного кода вычисленного значения f tx- На этом заканчивается работа блока 6 считывания в цикле и осуществляется переход к 1+1-му циклу, работа в котором осуществляется по алгоритму для 1-го цикла (фиг. 7).
Таким образом, в результате проведения рассмотренных операций на выходе блока 6 считывания на группе индикаторов 19 отображается точное значение частоты измеряемого радио- Сигнала. В случае поступления на вход
измерителя N сигналов с различными неизвестными частотами fc) , fc/i , ..., fC(V , амплитуды которых распределены . следующим образом I U , I IU г I ... dUNl, следящий фильтр 2, построенный на системе ФАПЧ, будет захватывать сигнал с fc, , имеющий наибольшую амплитуду U1.
Использование следящего фильтра на основе системы фазовой автоподстройки частоты позволяет повысить точность измерения сигналов, имеющих малое отношение сигнал/помеха.
Формула изобретения
и подстраиваемый генератор, первый выход которого является выходом следящего фильтра, а второй выход соединен с вторым входом фазового детектора, первый вход которого является входом следящего фильтра.
5
0
5
0
5
тывания содержит 2N преобразователей аналог-код, первую группу из 2N регистров, микроконтроллер, М индикаторов, где М - количество разрядов выводимого на индикацию десятичного числа, вторую групп из М регистров, группу из М дешифраторов, дешифратор, элемент НЕ, причем первые 2N входов преобразователей аналог -код, являются входами блока считывания, выходы 2N преобразователей аналог- код соединены с информационными входами соответствующих регистров первой группы, микроконтроллер подключен шиной данных к выходам регистров первой группы и к информационным входам регистров второй группы, а шиной адреса - к входу дешифратора, первая группа выходов которого соединена с третьими входами соответствующих регистров первой группы, вторая группа выходов дешифратора с вторыми входами соответствующих регистров второй группы, первьй выход дешифратора соединен с вторым входом регистров первой группы, второй выход дешифратора подключен к второму входу 2N преобразователей аналог - код, третий выход дешифратора соединен с входом элемента НЕ, выход которого соединен с первыми входами регистров первой и второй групп,выходы регистров второй группы соединены с входами одноименных дешифраторов группы, выходы которых подключены к входам соответствующих М индикаторов.
i
Фм2 МЧг),
Jin 5ц.
ж
14
гI fij/- 1X1 t
Ю-LIJ L
ш
Jti
р - qp
Фкг.З
Jti
qp
JL
tfttt.V
VO го
v
$
44
I
I
I
ft
to
I
5:
Ю
ti
«M
чГ
N,4 M
-F
00
J J
j
.
J5
4
4 Ц
4J
s
| Измеритель несущей частоты радиосигналов | 1984 |
|
SU1193596A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
