Изобретение относится к области управления процессами измельчения в мельницах и может быть использовано в цементной, горно-обогатительной, металлургической промышленности, а также в других отраслях, где применяется тонкое измельчение материалов.
и в блоке 15 вычитания из него вычитается усредненное значение дисперсии сигнала датчика степени загрузки. В блоке 16 деления на данную разность делят результат умножения, полученный в блоке 19 умножения предыдущего значения центрированного сигнала степени загрузки, поступающего Целью изобретения является повыше-ю с блока 10 задержки, на разность,
30
ние качества управления .
На чертеже представлена блок-схема системы автоматического управления загрузкой мельницы.
Система содержит мельницу 1, дат- 15 чик 2 степени загрузки, дозирующее устройство 3, регулятор 4, задатчик 5, фильтр 6, сумматор 7, блок 8 умножения, фильтр 9, блок 10 задержки, блок И умножения, фильтр 12, блок 20 13 деления, блок 14 умножения, блок 15 вычитания, блок 16 деления, блок 17 умножения, блок 18 вычитания, блок 19 умножения, пороговый блок 20, ключ 21, интегратор 22, ключ 23, 25 пороговый блок 24, ключи 25 и 26, инвертор 27.
Система работает следующим образом.
Сигнал датчика 2 степени загрузки мельницы 1 поступает на фильтр 6, где из сигнала выделяется его низкочастотная составляющая (среднее значение).
Выходной сигнал фильтра 6 подается на сумматор 7, где из него вычитается сигнал датчика 2 степени загрузки, в результате чего выходной сигнал сумматора 7 представляет собой центрированное значение сигнала степени загрузки. Данный сигнал поступает на блок 8 умножения, где рассчитывается дисперсия сигнала степени загрузки. В фильтре 9 текущее значение дисперсии усредняется. Выходной сигнал сумматора 7 подается также на блок 10 задержки и на блок 11 умножения, где рассчитывается текущее значение коэффициента корре- ляции между текущим и предыдущим значениями сигнала степени загрузки. Текущее значение коэффициента корреляции усредняется в фильтре 12. Усредненные значения дисперции и коэффициента корреляции поступают на блок 13 деления, где рассчитывается коэффициент авторегрессии процесса. В блоке 14 умножения коэффициент авторегрессии возводится в квадрат
35
40
45
50
55
получаемую в блоке 18 вычитания, текущего значения центрированного сигнала степени загрузки и его предыдущего значения, умноженного в блоке 17 умножения на коэффициент авторегрессии процесса.
Выходной сигнал блока 16 деления характеризует вероятность перехода от нормального состояния процесса к нарушению (разгрузке или перегрузке), причем при его отрицательных значениях эта вероятность близка к нулю, а при увеличении сигнала в области положительных значений - вероятность стремится к единице.
Поэтому для фррмирования в интеграторе 22 управляющего сигнала на регулятор 4, который должен быть пропорционален вероятности перехода нормального состояния к нарушению, т.е.должен учитывать только положительные значения выходного сигнала блока 16, в цепи передачи сигнала от блока 16 к интегратору 22 включен w-люч 21. Ключ 21 замыкает цепь путем воздействия на него сигнала пг порогового блока 20, который подключен к выходу блока 16 деления. Порог блока 20 настроен на границу разделения положительных и отрицательных значений.
Сброс интегратора 22 при появлении отрицательного сигнала с блока 16 производится путем замыкания цепи обратной связи интегратора 22 ключом 23, который срабатывает от сигнала порогового блока 20.
От интегратора 22 на регулятор 4 сигнал поступает либо по цепи с ключом 25, либо по цепи с инвертором 27 и ключом 26. Управление ключами 25 и 26 осуществляется пороговым элементом 24, который подключен к выходу сумматора 7 и реагирует на его знак. Производится это для того, чтобы определить знак приращения управляющего воздействия в сторону увеличения (сигнал проходит по цепи с ключом 25) или в сторону умень0
5 0 5
5
0
5
0
5
получаемую в блоке 18 вычитания, текущего значения центрированного сигнала степени загрузки и его предыдущего значения, умноженного в блоке 17 умножения на коэффициент авторегрессии процесса.
Выходной сигнал блока 16 деления характеризует вероятность перехода от нормального состояния процесса к нарушению (разгрузке или перегрузке), причем при его отрицательных значениях эта вероятность близка к нулю, а при увеличении сигнала в области положительных значений - вероятность стремится к единице.
Поэтому для фррмирования в интеграторе 22 управляющего сигнала на регулятор 4, который должен быть пропорционален вероятности перехода нормального состояния к нарушению, т.е.должен учитывать только положительные значения выходного сигнала блока 16, в цепи передачи сигнала от блока 16 к интегратору 22 включен w-люч 21. Ключ 21 замыкает цепь путем воздействия на него сигнала пг порогового блока 20, который подключен к выходу блока 16 деления. Порог блока 20 настроен на границу разделения положительных и отрицательных значений.
Сброс интегратора 22 при появлении отрицательного сигнала с блока 16 производится путем замыкания цепи обратной связи интегратора 22 ключом 23, который срабатывает от сигнала порогового блока 20.
От интегратора 22 на регулятор 4 сигнал поступает либо по цепи с ключом 25, либо по цепи с инвертором 27 и ключом 26. Управление ключами 25 и 26 осуществляется пороговым элементом 24, который подключен к выходу сумматора 7 и реагирует на его знак. Производится это для того, чтобы определить знак приращения управляющего воздействия в сторону увеличения (сигнал проходит по цепи с ключом 25) или в сторону умень314
шения (сигнал проходит по цепи с инвертором и ключом 26) расхода по отношению к сигналу задатчика 5 в зависимости от ситуации разгрузки или перегрузки. Ситуация определяется знаком выходного сигнала с сумматора 7.
Сформированный в регуляторе 4 сигнал подается на исполнительный механизм (не показан) дозирующего устройства 3.
Данная схема позволит повысить качество управления за счет снижения дисперсии выходного сигнала, так как уменьшается раскачка системы от сложных управляющих воздействий при незначительных отклонениях процесса от среднего уровня.
Формула изобретения
Система автоматического управлени загрузкой мельницы, содержащая датчик степени загрузки мельницы материалом, первый выход которого соединен с первым входом сумматора непосредственно, а второй выход датчика степени загрузки соединен с вторым входом сумматора через первый фильтр, регулятор с задатчиком, выход регулятора подключен к исполнительному механизму дозирующего устройства, отличающаяся тем, что, с целью повышения точности управления, она снабжена вторым и третьим фильтрами, двумя блоками вычитания, пятью блоками умножения, двумя блоками деления, интегратором, инвертором, двумя пороговыми блоками, четырьмя ключами и блоком задержки, причем выход сумматора соединен с первым входом первого блока вычитания, с первым входом блока задержки, с входами первого блока умножения, с первым входом второго блока умножения и с входом первого порогового
3850
0
5
0
5
0
5
0
5
блока, выход которого подключен к первым входам ..первого и второго ключей, выходы блока задержки соединены с вторым входом второго блока умножения, с первым входом третьего блока умножения и с первым входом четвертого блока умножения, выход которого соединен с первым входом первого блока деления, первый выход которого соединен с входом второго порогового блока, выход которого соединен с первым входом третьего ключа и с первым входом четвертого ключа, выход которого подключен к первому входу интегратора, выходы которого подключены к вторым входам первого, второго и четвертого ключей, выход второго ключа соединен с первым входом регулятора, выход второго блока умножения через второй фильтр соединен с первым входом второго блока деления, выход первого блока умно- ,жения подключен к входу третьего .фильтра, выходы которого соединены с первыми входами второго блока вычитания и пятого блока умножения и (с вторым входом второго блока деления, первый вход которого соединен с вторым входом пятого блока умножения, второй выход второго блока деления соединен с вторым входом третьего блока умножения, выход пятого блока умножения подключен к второму входу второго блока вычитания, выход которого соединен с вторым входом первого блока деления, выход которого соединен с вторым входом третьего ключа, выход которого соединен с вторым входом второго интегратора, выход первого ключа через инвертор подключен к второму входу регулятора, выход третьего блока умножения соединен с вторым входом, первого блока вычитания, выход которого соединен с вторым входом четвертого блока умножения.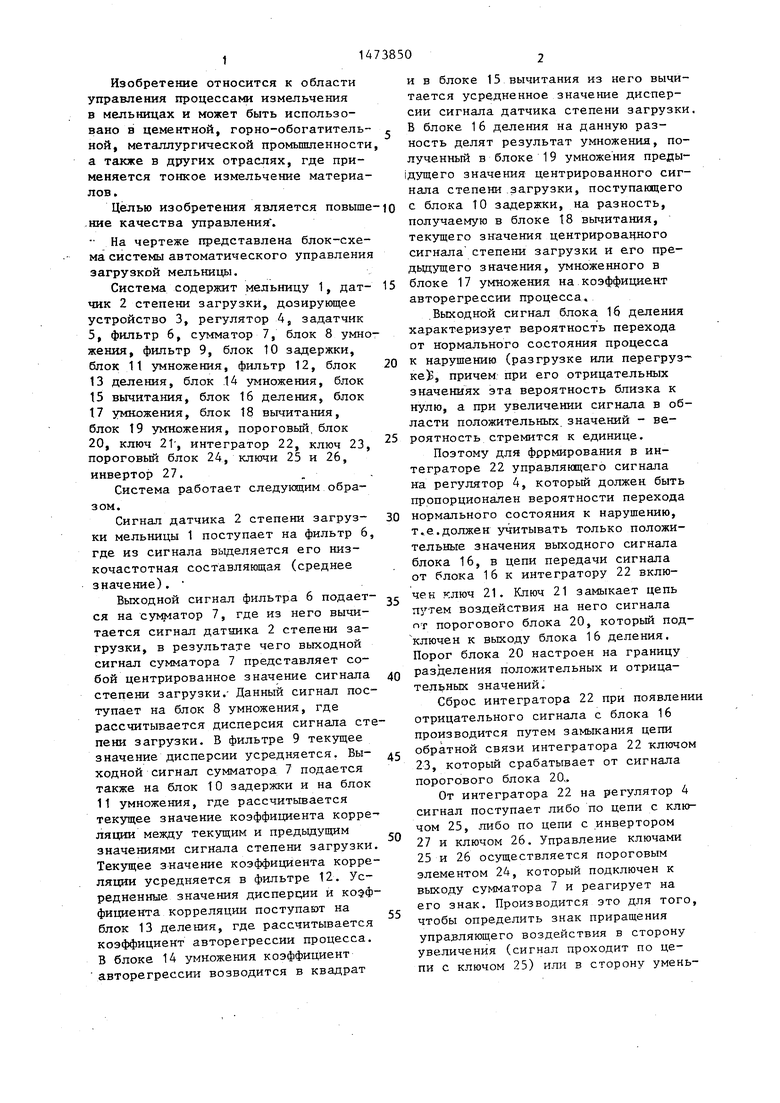
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная система управления рудовосстановительной электропечи | 1981 |
|
SU954770A1 |
| Устройство для определения характеристик фотографических систем | 1988 |
|
SU1566381A1 |
| Устройство для определения параметров динамического звена | 1987 |
|
SU1478194A1 |
| Система автоматического регулирования одностадийным циклом мокрого измельчения | 1982 |
|
SU1255208A1 |
| Система автоматического регулирования загрузки мельницы | 1981 |
|
SU1007729A1 |
| Устройство для определения параметров динамического звена | 1983 |
|
SU1160372A1 |
| Регулятор скорости движения транспортного средства | 1986 |
|
SU1498646A1 |
| Устройство для моделирования одноканальной системы передачи информации с импульсно-кодовой модуляцией | 1988 |
|
SU1578719A1 |
| Система автоматической стабилизации плотности пульпы в сливе классификатора при мокром процессе измельчения | 1984 |
|
SU1260022A1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ПОМЕХ | 1988 |
|
SU1841099A1 |
Изобретение относится к области управления процессами измельчения в шаровых мельницах, может быть использовано в цементной, горно-обогатительной, металлургической промышленности, и позволяет повысить точность управления. Оно содержит мельницу 1, датчик 2 степени загрузки, дозирующее устройство 3, регулятор 4, задатчик 5, фильтр 6, сумматор 7, блок 8 умножения, фильтр 9, блок 10 задержки, блок 11 умножения, блок 15 вычитания, блок 16 деления, блок 17 умножения, блок 18 вычитания, блок 19 умножения, пороговый блок 20, ключ 21, интегратор 22, ключ 23, пороговый блок 24, ключ 25, ключ 26, инвертор 27. 1 ил.
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления шаровой мельницей помола клинкера | 1981 |
|
SU967566A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
