Фиг Z
корпуса, и поворотный относительно оси С 3 элемент корпуса. Поворотный элемент выполнен в виде двух диаметрально расположенных относительно оси С 3 подвижных частей 5 и 6, имеющих фиксатор в виде крышки 7 для их стопорения относительно части 4. На частях 5, 6 смонтированы цилиндрические приемно-передающие стержни (ПС) 8, 9. Между собой ПС 8, 9 связаны направляющей (Н) 15, смонтированной на части 4. Внутри ПС 8, 9 и Н 15, выполненных в виде пустотелых цилиндров, свободно размещены отдельные шаровые элементы 16. При этом ПС 8, 9 и Н 15 имеют одинаковый диаметр и их сопряженные участки соединены гибкими обоймами 17. На концах ПС 8, 9 выполнены сквозные пазы 14 для прохождения пальцев, смонтированных на крайних элементах 16. На частях 5 и 6 ПС 8, 9 установлены шар- нирно с возможностью фиксации. После установки детали 1 на ПС 8 осуществляется поворот С 3. При подаче на ПС 9 следующей детали 1 она, взаимодействуя с пальцами, сдвигает элементы 16 внутри ПС 8, 9 и Н 15. Противоположными пальцами деталь 1 сталкивается с ПС 8. Для изменения направления потока деталей 1 освобождают крышку 7 и перемещают части 5 и 6 относительно оси С 3. Осуществляют сначала фиксацию частей 5 и 6 крышкой 7, а затем поворачивают ПС 8, 9 под необходимым углом в горизонтальной или вертикальной плоскостях и фиксируют их. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для межоперационной передачи деталей с отверстиями | 1989 |
|
SU1641746A1 |
| Устройство для межоперационной передачи деталей с отверстиями | 1985 |
|
SU1301750A1 |
| Устройство для межоперационной передачи деталей с отверстиями | 1983 |
|
SU1150186A1 |
| Устройство для межоперационной передачи деталей с отверстием | 1983 |
|
SU1081092A1 |
| Устройство для межоперационной передачи деталей с отверстиями | 1988 |
|
SU1579870A1 |
| УСТРОЙСТВО БЛОКИРОВКИ ПЕРЕМЕЩЕНИЯ ПОДВИЖНОГО УЗЛА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2017 |
|
RU2651381C1 |
| Устройство для межоперационной передачи деталей | 1975 |
|
SU575294A1 |
| Устройство для межоперационной передачи деталей с отверстиями | 1981 |
|
SU998256A1 |
| ШТАМП ДЛЯ РАЗДАЧИ ПОЛЫХ ЗАГОТОВОК | 1991 |
|
RU2083307C1 |
| МНОГОКАНАЛЬНЫЙ СКОЛЬЗЯЩИЙ ТОКОСЪЕМНИК | 2000 |
|
RU2193810C2 |
Изобретение относится к легкой и другим отраслям промышленности. Цель - расширение технологических возможностей путем обеспечения как углового, так и параллельного смещения грузопотоков. На основании установлена поворотная стойка (С)3, несущая неподвижную часть 4 корпуса и поворотный относительно оси С 3 элемент корпуса. Поворотный элемент выполнен в виде двух диаметрально расположенных относительно оси С3 подвижных частей 5 и 6, имеющих фиксатор в виде крышки 7 для их стопорения относительно части 4. На частях 5,6 смонтированы цилиндрические приемно-передающие стержни (ПС) 8,9. Между собой ПС 8,9 связаны направляющей (Н)15, смонтированной на части 4. Внутри ПС 8,9 и Н 15, выполненных в виде пустотелых цилиндров, свободно размещены отдельные шаровыеэлементы 16. При этом ПС 8,9 и Н 15 имеют одинаковый диаметр и их сопряженные участки соединены гибкими обоймами 17. На концах ПС 8,9 выполнены сквозные пазы 14 для прохождения пальцев, смонтированных на крайних элементах 16. На частях 5 и 6 ПС 8,9 установлены шарнирно с возможностью фиксации. После установки детали 1 на ПС 8 осуществляется поворот С 3. При подаче на ПС 9 следующей детали 1 она, взаимодействуя с пальцами, сдвигает элементы 16 внутри ПС 8,9 и Н 15. Противоположными пальцами деталь 1 сталкивается с ПС 8. Для изменения направления потока деталей 1 освобождают крышку 7 и перемещают части 5 и 6 относительно оси С 3. Осуществляют сначала фиксациючастей 5 и 6 крышкой 7, а затем поворачивают ПС 8,9 под необходимым углом в горизонтальной или вертикальной плоскостях и фиксируют их. 3 ил.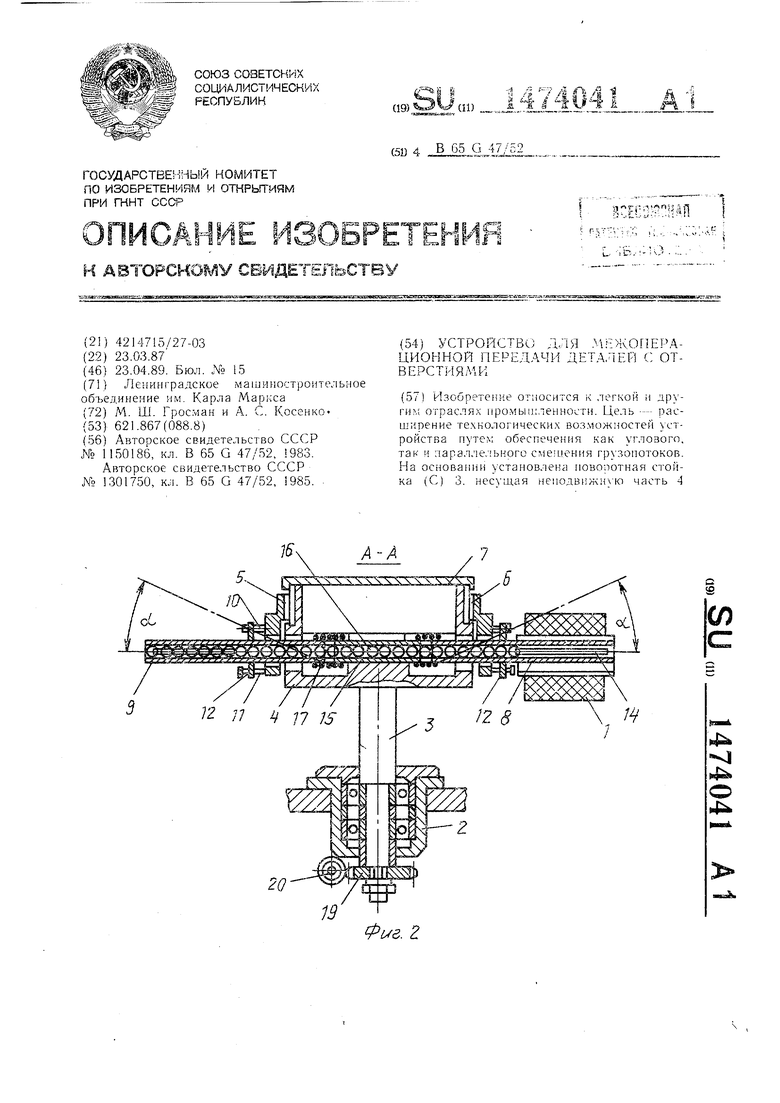
1
Изобретение относится к транспортированию деталей, точнее к устройствам для передачи деталей, имеющих отверстия, преимущественно паковок с машин формования химических волокон, и может быть использовано в легкой промышленности и других отраслях для передачи деталей с отверстиями по различным направлениям: при параллельном или угловом смещении грузопотока деталей в параллельных плоскостях или при изменении уровня грузопотока и его направления, причем взаимное расположение зон приема деталей и зоны их подачи может быть изменено, за счет изменения вертикального смещения и/или углов между подающим и отводящими потоками.
Цель изобретения - расширение технологических возможностей путем обеспечения как углового, так и параллельного смещения грузопотоков.
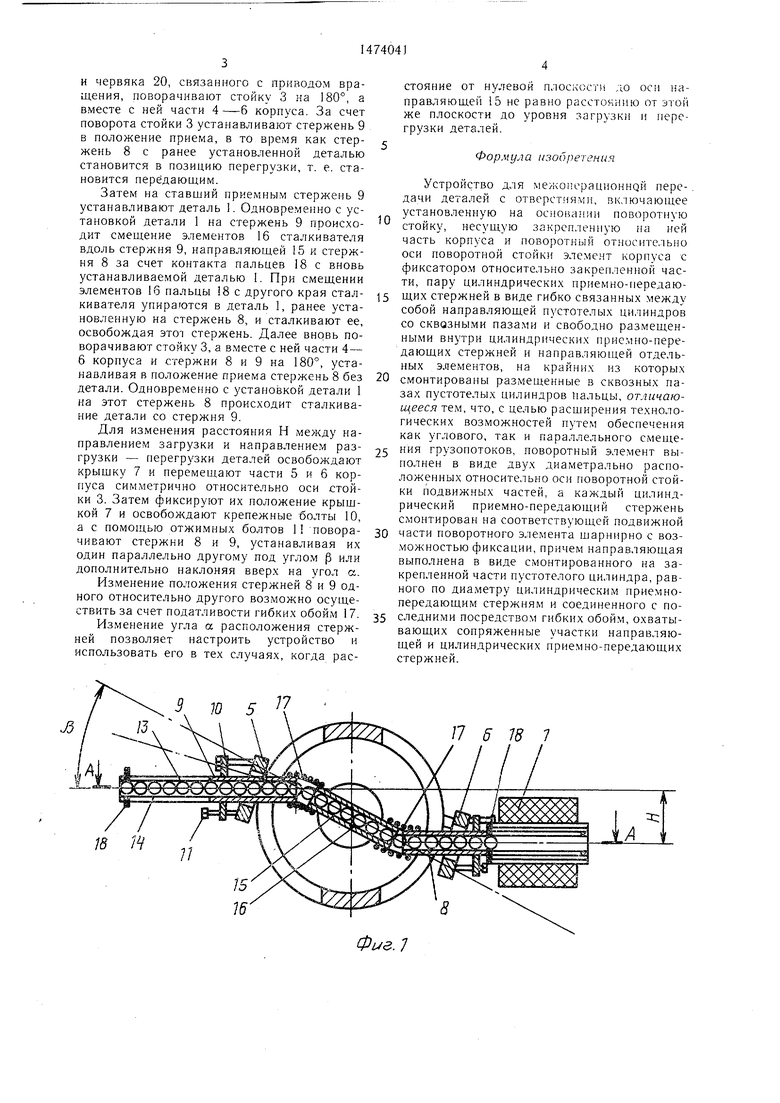
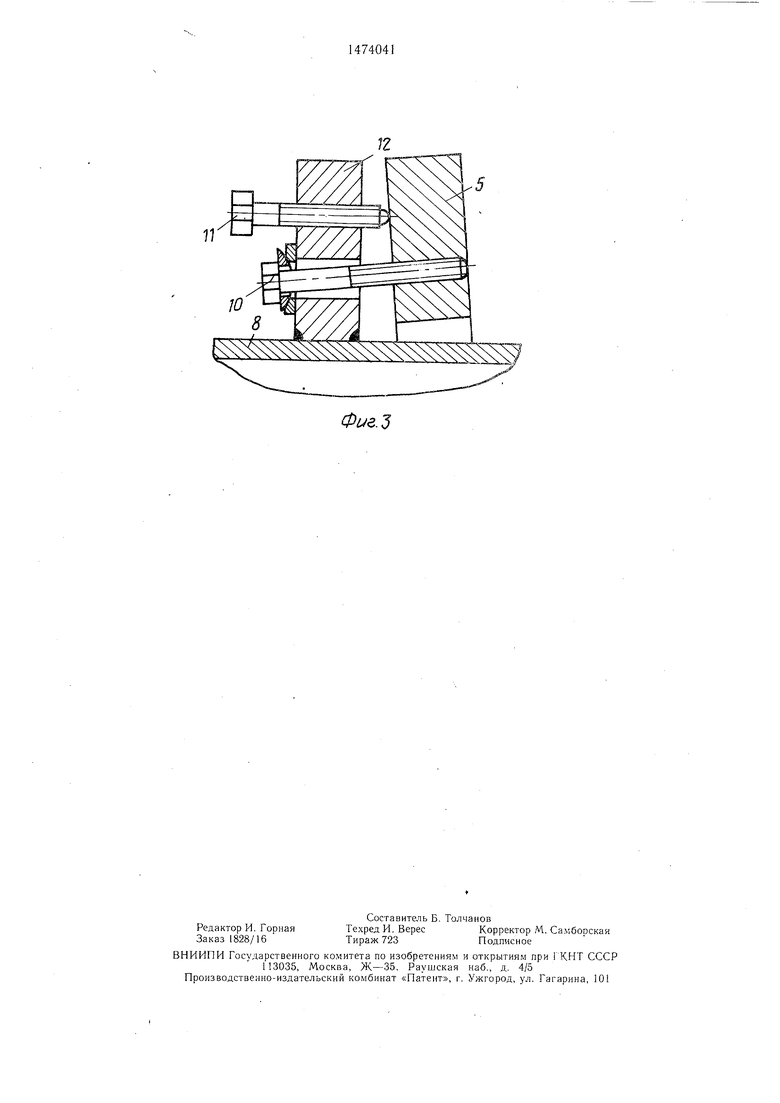
На фиг. 1 изображено предлагаемое устройство, план; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - узел соединения и фиксации приемно-передающих стержней относительно подвижных частей.
Устройство для межоперационной передачи деталей 1, имеющих отверстие, содержит установленную на основании 2 поворотную вокруг оси стойку 3. На торце стойки 3 закреплены неподвижно часть 4 составного корпуса и поворотный относительно оси стойки 3 элемент. Последний выполнен в виде диаметрально расположенных относительно оси поворотной стойки 3 двух подвижных частей 5 и 6 корпуса, установленных с возможностью поворота относительно части 4 и фиксации относительно ее посредством крышки 7, закрепленной болтами на части 4 и являющейся одновременно замковым элементом для частей 5 и 6 корпуса, предотвращающим выпадение этих
частей. В каждой подвижной части 5 и 6 корпуса установлены с возможностью изменения положения в пространстве и фиксации цилиндрические приемно-передающие стержни 8 и 9 соответственно.
Фиксация стержней 8 и 9, например, под углом ас. относительно соответствующих частей 5 и 6 корпуса может осуществляться любым известным способом, например посредством пространственного шарнира, со0 держащего ряд крепежных 10 и отжимных 11 болтов, размещенных на фланце 12 каждого стержня 8 и 9.
Стержни 8 и 9 представляют собой пустотелые цилиндры, в каждом из Которых выполнены диаметрально противоположные
- сквозные пазы 13 и 14. На части 4 корпуса неподвижно смонтирована направляющая 15 для сталкивания деталей в виде пустотелого цилиндра, имеющего диаметр, равный диаметру стержней 8 и 9. Сталкива0 тель деталей 1 представляет собой совокупность контактирующих один с другим отдельных шаровых элементов 16, свободно установленных внутри стержней 8 и 9 и направляющей 15. Концы стержней 8 и 9, обращенные к направляющей 15, связаны с
5 ней гибкими обоймами 17, выполненными в виде пружин с плотно прижатыми витками, охватывающими сопряженные участки направляющей 15 и стержней 8 и 9. Крайние шаровые элементы 16 снабжены пальцами 18, размещенными в пазах 13 и И
0 стержней 8 и 9.
Стойка 3 связана с приводом (не показан) через зубчатое колесо 19 и приводной червяк 20.
Устройство работает следующим образом.
Деталь 1, например паковку, устанавлн вают посредством толкателя (ке показам)
на стержень 8. Затем с помощью колеса 9
и червяка 20, связанного с приводом вращения, поворачивают стойку 3 на 180°, а вместе с ней части 4 --6 корпуса. За счет поворота стойки 3 устанавливают стержень 9 в положение приема, в то время как стержень 8 с ранее установленной деталью становится в позицию перегрузки, т. е. становится передающим.
Затем на ставший приемным стержень 9 устанавливают деталь 1. Одновременно с установкой детали 1 на стержень 9 происходит смещение элементов 16 сталкивателя вдоль стержня 9, направляющей 15 к стержня 8 за счет контакта пальцев 18 с вновь устанавливаемой деталью 1. При смещении элементов 16 пальцы 8 с другого края сталкивателя упираются в деталь 1, ранее установленную на стержень 8, и сталкивают ее, освобождая этот стержень. Далее вновь поворачивают стойку 3, а вместе с ней части 4- 6 корпуса и стержни 8 и 9 на 180°, устанавливая в положение приема стержень 8 без детали. Одновременно с установкой детали 1 на этот стержень 8 происходит сталкивание детали со стержня 9.
Для изменения расстояния Н между направлением загрузки и направлением разгрузки - перегрузки деталей освобождают крышку 7 и перемещают части 5 и б корпуса симметрично относительно оси стойки 3. Затем фиксируют их положение крышкой 7 и освобождают крепежные болты 10, а с помощью отжимных болтов 1 поворачивают стержни 8 и 9, устанавливая их один параллельно другому под углом (3 или дополнительно наклоняя вверх на угол а.
Изменение положения стержней 8 и 9 одного относительно другого возможно осуществить за счет податливости гибких обойм 17.
Изменение угла а расположения стержней позволяет настроить устройство и использовать его в тех случаях, когда рас18 W
0
0
5
0
5
стояние от нулевой плоскости до осп направляющей 15 не равно расстоянию от лой же плоскости до уровня загрузки и перс- грузки деталей.
Формула пзо6рв1енич
Устройство для межонерационной передачи деталей с отверстиями, включающее установленную на основании поворотную стойку, несущую закрепленную на ней часть корпуса и поворотный относительно оси поворотной стойки элемент корпуса с фиксатором относительно закрепленной части, пару цилиндрических приемно-передаю- щих стержней в виде гибко связанных между собой направляющей пустотелых цилиндров со сквозными пазами и свободно размещенными внутри цилиндрических присмно-пере- дающих стержней и направляющей отдельных элементов, на крайних из которых смонтированы размещенные в сквозных пазах пустотелых цилиндров пальцы, отличающееся тем, что, с целью расширения технологических возможностей путем обеспечения как углового, так и параллельного смещения грузопотоков, поворотный элемент выполнен в виде двух диаметрально расположенных относительно оси поворотной стойки подвижных частей, а каждый цилиндрический приемно-передающий стержень смонтирован на соответствующей подвижной части поворотного элемента шарнирно с возможностью фиксации, причем направляющая выполнена в виде смонтированного на закрепленной части пустотелого цилиндра, равного по диаметру цилиндрическим приемно- передающим стержням и соединенного с последними посредством гибких обойм, охватывающих сопряженные участки направляющей и цилиндрических приемно-передающих стержней.
/7 6 18 1
Фиг.1
Фиг.Ъ
