1
Изобретение относится к получению металлической полосы бесслитковым способом и может быть использовано для управления вытягивающими вал ками, которые являются основой вытягивающего механизма, входящего в установку непрерывного литья горизонтального типа для получения полос из сплавов на медной основе.
Цель изобретения - получение качественной полосы из сплавов метал- лов широкой номенклатуры.
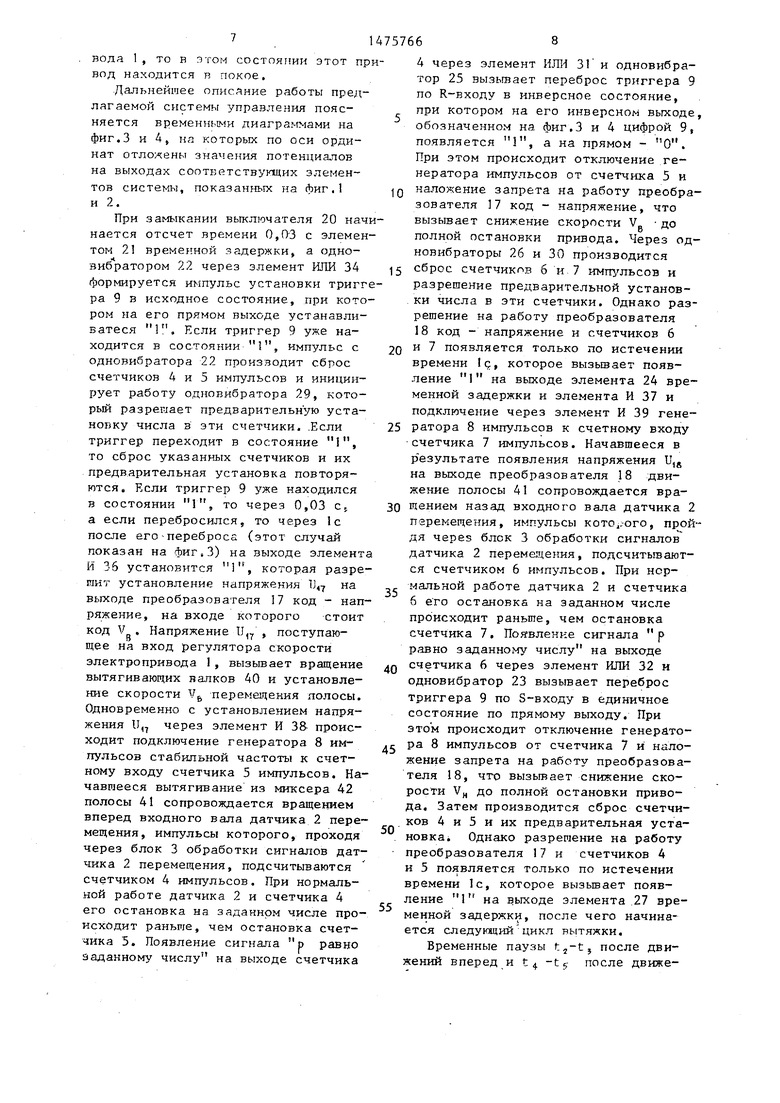
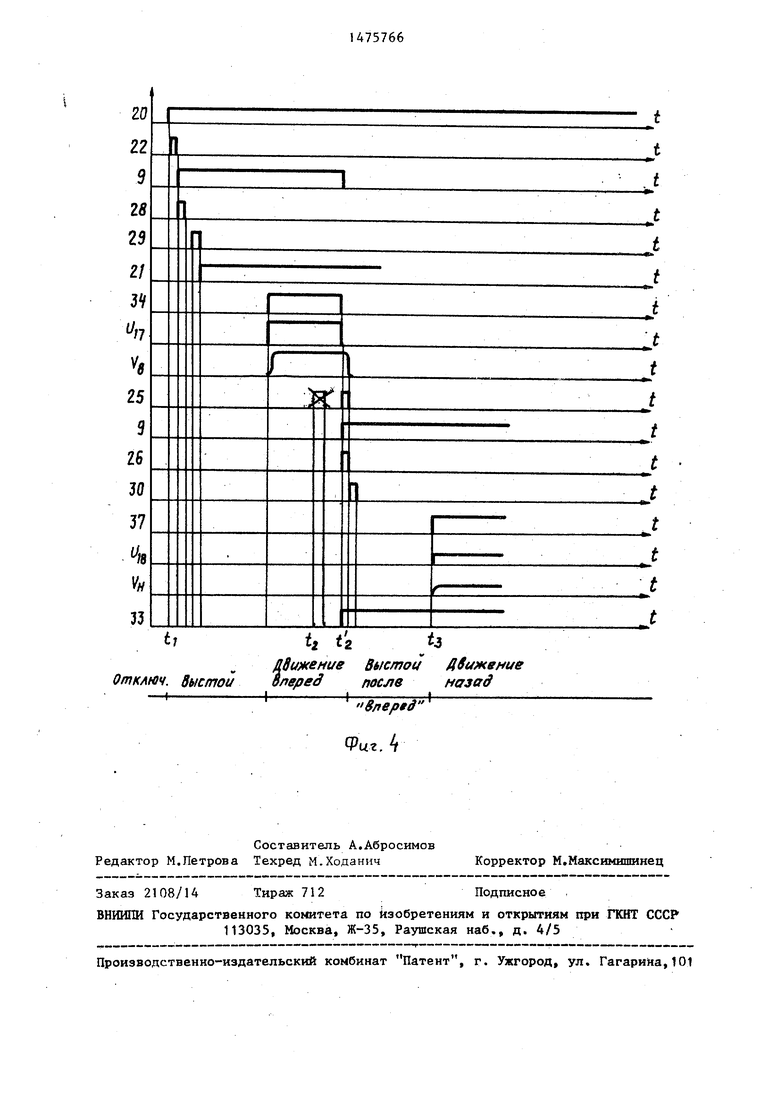
На фиг.1 показана функциональная схема предлагаемой системы управления вытягивающими валками установки непрерывного литья; на фиг.2 - функциональная схема логического устройства; на фиг.З - временные диаграммы работы элементов предлагаемой системы управления при нор- мальной работе датчика перемещения, блока обработки сигналов датчика перемещения и первого и-третьего счетчиков импульсов, т.е. тракта управления вытягиванием полосы по заданному перемещению; на фиг.4 - то же, при частичном отказе датчика перемещения, блока обработки сигналов датчика перемещения или первого счетчика импульсов.
Система управления вытягивающими валками установки непрерывного литья содержит (фиг.1) реверсивный электропривод 1 с регулятором скорости, импульсный датчик 2 перемещения, блок 3 обработки сигналов датчика 2 перемещения, входы которого подключены к выходам импульсного датчика 2 перемещения, четыре счетчика 4-7 импульсов, каждый из которых имеет выход р равно заданному числу, генератор 8 импульсов стабильной частоты, триггер 9 и элемент 10 сигнализации, причем один выход блока 3 о5- работки сигналов датчиков 2 перемещения подключен к счетному входу первого счетчика 4 импульсов, а другой - к счетному входу третьего счетчика S импульсов, четыре цифровых переключателя 11-14, два блока 15 и 16 памяти, два преобразователя 17 и 18
код - напряжение и логическое устройство 19. Выходы первого цифрового переключателя 11 подключены к входам предварительной установки числа первого счетчика 4 импульсов и одной час5 ти адресных входов первого блока 15 памяти} выходы второго цифрового переключателя 12 - к входам предварительной установки числа третьего счетчика б импульсов и одной части
0 адресных входов второго блока 16 памяти, выходы третьего цифрового переключателя 13 - к оставшейся части адресных входов первого блока 15 памяти и цифровым входам первого пре5 образователя 17 код - напряжение, выходы четвертого цифрового переключателя 14 - к оставшейся части адресных входов второго блока 16 памяти и цифровым входам второго преобразо0 вателя 18 код - напряжение, входы логического устройства 19 подключены к соответствующим выходам триггера 9, , р равно заданному числу каждого из счетчиков 4-7 и генератое ра 8 импульсов стабильности частоты, а выходы - к соответствующим входам сброса и разрешения предварительной установки числа каждого из счетчиков 4-7, счетным входам второго 5
0 и четвертого 7 счетчиков, входам разрешения работы преобразователей код - напряжение, триггера 9 и элемента 10 сигнализации, а выходы преобразователей 17 и 18 код - напряжение подключены к соответствующим входам реверсивного электропривода 1 с регулятором скорости.
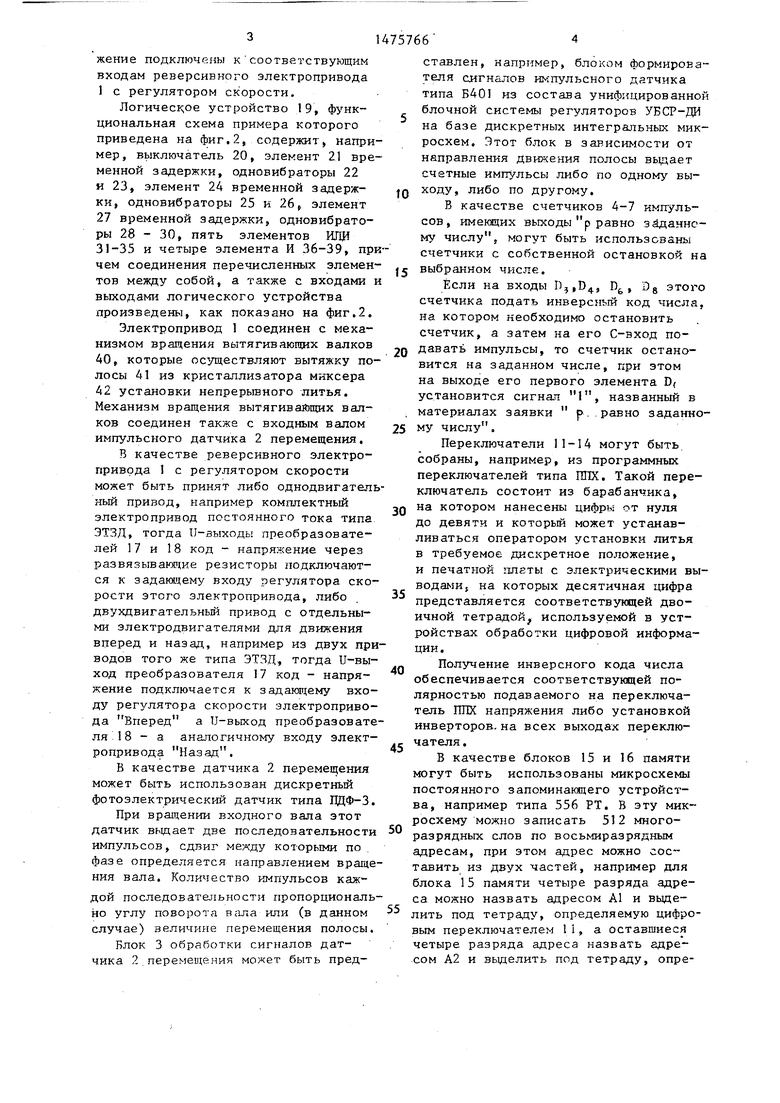
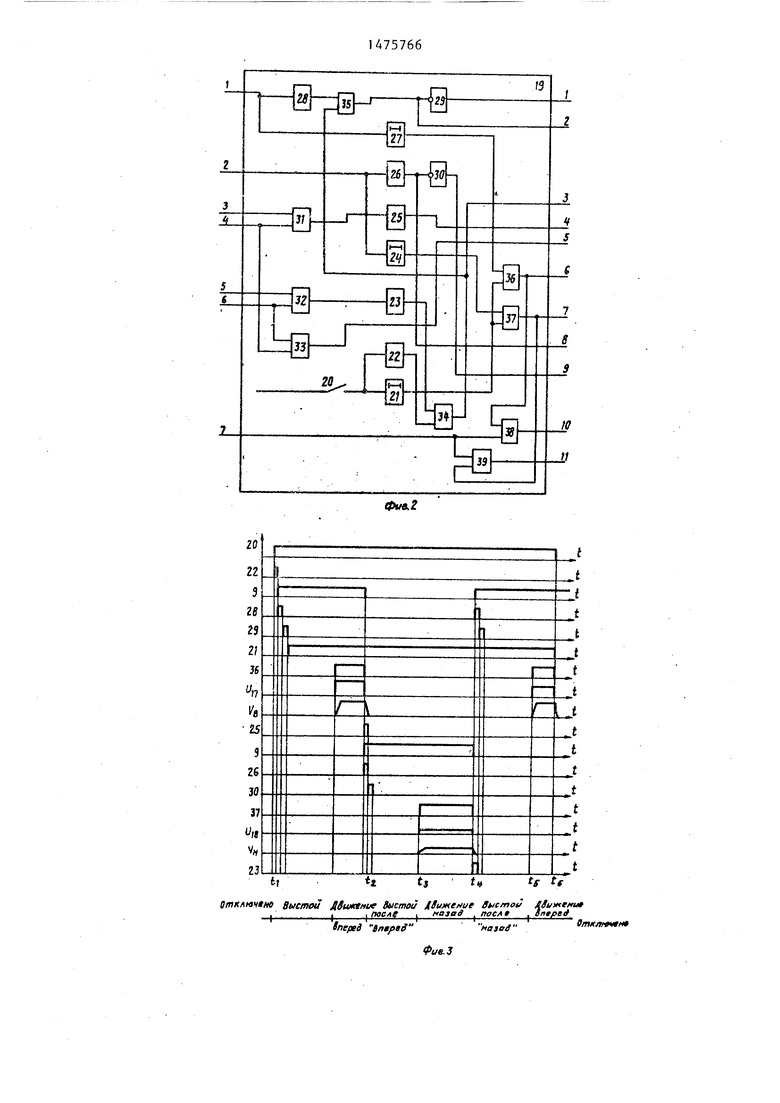
Логическое устройство 19, функциональная схема примера которого приведена на фиг.2, содержит, например, выключатель 20, элемент 21 временной задержки, одновибраторы 22 и 23, элемент 24 временной задержки, одновибраторы 25 и 26 f элемент 27 временной задержки, одновибраторы 28 - 30, пять элементов ИЛИ 31-35 и четыре элемента И 36-39, причем соединения перечисленных элементов между собой, а также с входами и выходами логического устройства произведены, как показано на фиг.2.
Электропривод 1 соединен с механизмом вращения вытягивающих валков 40, которые осуществляют вытяжку полосы 41 из кристаллизатора миксера 42 установки непрерывного литья. Механизм вращения вытягивающих валков соединен также с входным валом импульсного датчика 2 перемещения.
В качестве реверсивного электропривода 1 с регулятором скорости может быть принят либо однодвигатель ный привод, например комплектный электропривод постоянного тока типа ЭТЗД, тогда 11-зыходы преобразователей 17 и 18 код - напряжение через развязывающие резисторы подключаются к задающему входу регулятора скорости этого электропривода, либо двухдвигательный привод с отдельными электродвигателями для движения вперед и назад, например из двух приводов того же типа ЭТЗД, тогда U-выход преобразователя 17 код - напряжение подключается к задающему входу регулятора скорости электропривода Вперед а U-выход преобразователя 18 - а аналогичному входу электропривода Назад.
В качестве датчика 2 перемещения может быть использован дискретный фотоэлектрический датчик типа ЦЦФ-3.
При вращении входного вала этот датчик выдает две последовательности импульсов, сдвиг между которыми по фазе определяется направлением вращения вала. Количество импульсов каждой последовательности пропорционально углу поворота вала или (в данном случае) величине перемещения полосы.
Блок 3 обработки сигналов датчика 2 перемещения может быть пред5
ставлен, например, блоком формирователя сигналов импульсного датчика типа Б401 из состава унифицированной блочной системы регуляторов УБСР-ДИ на базе дискретных интегральных микросхем. Этот блок в зависимости от направления движения полосы выдает счетные импульсы либо по одному вы- Q ходу, либо по другому.
В качестве счетчиков 4-7 импульсов, имеющих выходы р равно заданному числу s могут быть использованы счетчики с собственной остановкой на j выбранном числе.
Если на входы Пэ,04, D6, J8 этого счетчика подать инверсный код числа, на котором необходимо остановить счетчик, а затем на его С-вход по- Q давать импульсы, то счетчик остановится на заданном числе, при этом на выходе его первого элемента D установится сигнал 1, названный в материалах заявки р равно заданному числу.
Переключатели 11-14 могут быть собраны, например, из программных переключателей типа ШГХ. Такой переключатель состоит из барабанчика, на котором нанесены цифрк т нуля до девяти и который может устанавливаться оператором установки литья в требуемое дискретное положение, и печатной платы с электрическими вывод aMHj на которых десятичная цифра представляется соответствующей двоичной тетрадой, используемой в устройствах обработки цифровой информации.
Получение инверсного кода числа обеспечивается соответствующей полярностью подаваемого на переключатель ППХ напряжения либо установкой инверторов, на всех выходах переключателя .
В качестве блоков 15 и 16 памяти могут быть использованы микросхемы постоянного запоминающего устройства, например типа 556 РТ. В эту микросхему можно записать 512 многоразрядных слов по восьмиразрядным адресам, при этом адрес можно составить из двух частей, например для блока 15 памяти четыре разряда адреса можно назвать адресом А1 и выделить под тетраду, определяемую цифровым переключателем 11, а оставшиеся четыре разряда адреса назвать адресом А2 и выделить под тетраду, опре0
5
0
5
0
5
деляемую цифровым переключателем 2. Аналогично можно поступить с адресными входами блока 16 памяти.
Если десятичное число состоит из нескольких цифр - тетрад, то можно использовать микросхемы типа 556 РТ с большей разрядностью адреса либо производить наращивание путем использования нескольких микросхем. I
В ячейки блока 15 памяти по адресам AI, А2 записывается ряд значений D предварительной установки числа счетчика 5, которые определяются следующим образом.
По результатам экспериментов по получению полосы из разных марок сплавов на данной установке технолог составляет таблицу данных: марка сплава, величина А1 перемещения вперед, величина А2 скорости движет- ния полосы вперед.
Затем для каждой марки сплава рассчитывают значения предварительной установки числа счетчика 5 по формуле
D
tp + t, +4t,
где t ,t,t,, ut - времена разгона
установившейся .скорости, замедления и запаса при перемещении привода на заданную величину с заданной скоростью вперед.
Число D для данной марки сплава есть расчетное время перемещения полосы вперед, представляющее собой приближенное частное от деления величины заданного перемещения вперед на величину уровня скорости движе- ния вперед.
В ячейки блока 16 памяти по адресам А1, А2 записывается ряд значений D предварительной установки числа счетчика 7, которые определяются аналогично (как для блока 15 памяти) но для перемещения полосы назад. Преобразователи 17 и 18 код - напряжение могут быть построены по схеме блока преобразователя код - напряжение типа Б501 из состава УБСР-ДИ, имеющего цифровой информационный вход D и управляющий вход F, который разрешает преобразование
либо удерживает выходное напряжение блока на нуле вне зависимости от входного кода на информационном входе блока.
Выключатель 20 представляет собой, например, тумблер, один полюс которого подключен к высокому потенциалу 11Пит источника питания логи
ческого устройства 19.
0
Одновибраторы 22,23,25,26,28-30 и элементы 21,24 и 27 временных задержек могут быть выполнены, например, по схеме элемента И--301 из сосс тава элементов управления серии Логика-И на базе цифровых интегральных микросхем. В приведенном примере логического устройства 19 од- новибраторы 22,23,25,26,28-30 имеют постоянную уставку времени 0,01 с, элемент 21 временной задержки - постоянную уставку времени 0,03 с, а элементы 24 и 27 временных задержек - регулируемые уставки времени в пре5 делах 0,5-2 с (органы управления уставками не показаны).
Система управления вытягивающими валками установки непрерывного литья работает следующим образом.
0 Перед началом работы системы управления оператор установки непрерывного литья цифровым переключателем 11 задает величину SB перемещения полосы вперед в цикле вытяжки, т.е.
5 первую часть адреса слова, находящегося в блоке 15 памяти; переключателем 13 - величину VB скорости полосы вперед в цикле вытяжки, т.е. вторую часть адреса слова; переклю0 чателем 12 - величину Sh перемещения полосы назад, т.е. первую часть адреса слова, находящегося в блоке 16 памяти, переключателем 14 - величину VH скорости полосы назад,
5 т.е. вторую часть адреса слова.
При разомкнутом состоянии выключателя 20 в логическом устройстве 19 на одном из входов каждого из элементов И 36 и 37 имеется О, поэто0 му на выходах этих элементов и Е- входах преобразователей 17 и 18 код - напряжение - также О. В этом состоянии напряжение на выходах преобразователей 17 и 18 равно нулю и не
5 зависит от значения кода на их D- входах. Так как выходное напряжение преобразователей 17 и 8 является сигналом задания скорости регулятору скорости реверсивного электропривода 1, то в этом состоянии этот привод находится в токое.
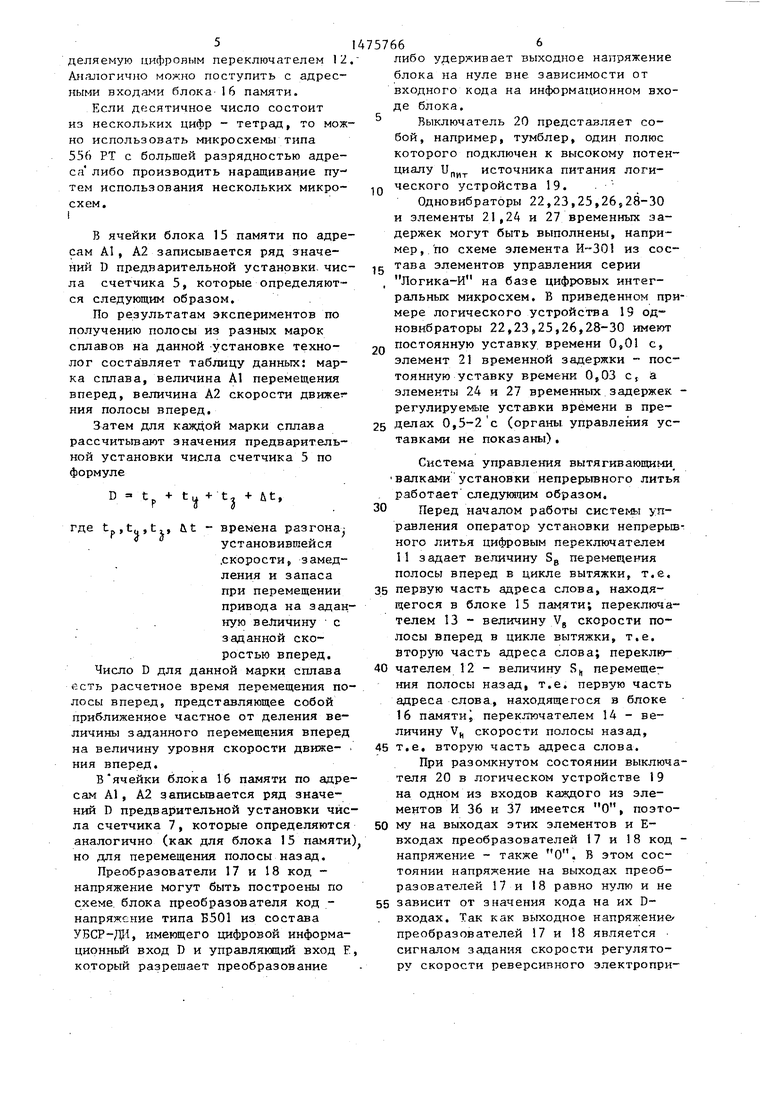
Дальнейшее описание работы предлагаемой системы управления поясняется временными диаграммами на фиг.З и 4, на которых по оси ординат отложены значения потенциалов на выходах соответствующих элементов системы, показанных на фиг.1 и 2.
При замыкании выключателя 20 начинается отсчет времени 0,03 с элементом 2 временной задержки, а одно- вибчратором 22 через элемент ИЛИ 34 формируется импульс установки триггера 9 в исходное состояние, при котором на его прямом выходе устанавли- ватеся 1. Если триггер 9 уже находится в состоянии 1, импульс с одновибратора 22 производит сброс счетчиков 4 и 5 импульсов и инициирует работу одновибратора 29, который разрешает предварительную уста- ноьку числа з эти счетчики. Если триггер переходит в состояние 1, то сброс указанных счетчиков и их предварительная установка повторяются. Если триггер 9 уже находился в состоянии 1, то через 0,03 с5 а если перебросился, то через 1с после его-переброса (этот случай показан на фиг.З) на выходе элемента И 36 установится 1, которая раэре- пит установление напряжения 7 на выходе преобразователя 17 код - напряжение, на входе которого стоит код V . Напряжение U17 , поступающее на вход регулятора скорости электропривода 1, вызывает вращение вытягивающих валков 40 и установление скорости УЬ перемещения полосы. Одновременно с установлением напряжения 1117 через элемент И 38- происходит подключение генератора 8 импульсов стабильной частоты к счетному входу счетчика 5 импульсов. Начавшееся вытягивание из миксера 42 полосы 41 сопровождается вращением вперед входного вала датчика 2 перемещения, импульсы которого, проходя через блок 3 обработки сигналов датчика 2 перемещения, подсчитываются счетчиком 4 импульсов. При нормальной работе датчика 2 и счетчика 4 его остановка на заданном числе происходит раньше, чем остановка счетчика 5. Появление сигнала р равно заданному числу на выходе счетчика
0
4 через элемент ИЛИ 31 и одновибра- тор 25 вызывает переброс триггера 9 по R-входу в инверсное состояние, при котором на его инверсном выходе, обозначенном на фиг.З и 4 цифрой 9, появляется 1, а на прямом - О. При этом происходит отключение генератора импульсов от счетчика 5 и
Q наложение запрета на работу преобразователя 17 код - напряжение, что вызывает снижение скорости V. до полной остановки привода. Через од- новибраторы 26 и 30 производится
5 сброс счетчиков б и 7 импульсов и разрешение предварительной установки числа в эти счетчики. Однако разрешение на работу преобразователя 18 код - напряжение и счетчиков 6 и 7 появляется только по истечении времени 1с, которое вызывает появление 1 на выходе элемента 24 временной задержки и элемента И 37 и подключение через элемент И 39 гене5 ратора 8 импульсов к счетному входу счетчика 7 импульсов. Начавшееся в результате появления напряжения U,e на выходе преобразователя 18 движение полосы 41 сопровождается вра0 шением назад входного вала датчика 2 перемещения, импульсы которого, пройдя через блек 3 обработки сигналов датчика 2 перемещения, подсчитываются счетчиком 6 импульсов. При нормальной работе датчика 2 и счетчика 6 его остановка на заданном числе происходит раньше, чем остановка счетчика 7. Появление сигнала р равно заданному числу на выходе счетчика 6 через элемент ИЛИ 32 и одновибратор 23 вызывает переброс триггера 9 по S-входу в единичное состояние по прямому выходу. При этом происходит отключение генератос ра 8 импульсов от счетчика 7 и наложение запрета на работу преобразователя 18, что вызывает снижение скорости VH до полной остановки привода. Затем производится сброс счетчиков 4 и 5 и их предварительная установка. Однако разрешение на работу преобразователя 17 и счетчиков 4 и 5 появляется только по истечении времени 1с, которое вызывает появ5
0
0
ление 1 на выходе элемента 27 временной задержки, после чего начинается следующий цикл вытяжки.
Временные паузы t2-tj после движений вперед и t4 -tf после движения назад устанавливаются регулируемыми элементами 27 и 24 временных задержек соответственно.
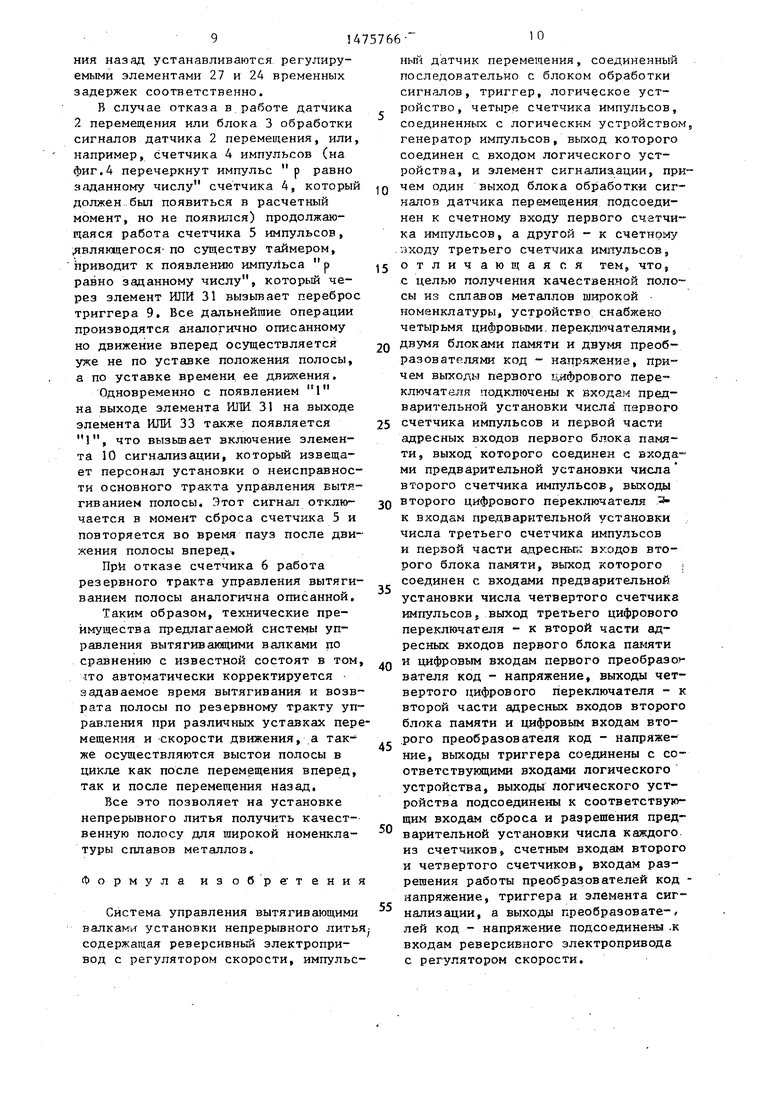
В случае отказа в работе датчика 2 перемещения или блока 3 обработки сигналов датчика 2 перемещения, или, например, счетчика 4 импульсов (на фиг. 4 перечеркнут импульс р равно заданному числу счетчика 4, который должен был появиться в расчетный момент, но не появился) продолжающаяся работа счетчика 5 импульсов, являющегося по существу таймером, приводит к появлению импульса р равно заданному числу, который через элемент ИЛИ 31 вызывает переброс триггера 9. Все дальнейшие операции производятся аналогично описанному но движение вперед осуществляется уже не по уставке положения полосы, а по уставке времени ее движения. Одновременно с появлением 1 на выходе элемента ИЛИ. 31 на выходе элемента ИЛИ 33 также появляется 1, что вызывает включение элемента 10 сигнализации, который извещает персонал установки о неисправности основного тракта управления вытягиванием полосы. Этот сигнал отключается в момент сброса счетчика 5 и повторяется во время пауз после движения полосы вперед.
При отказе счетчика 6 работа резервного тракта управления вытягиванием полосы аналогична описанной. Таким образом, технические преимущества предлагаемой системы управления вытягивающими валками по сравнению с известной состоят в том, зто автоматически корректируется задаваемое время вытягивания и возврата полосы по резервному тракту управления при различных уставках перемещения и скорости движения, а также осуществляются выстой полосы в цикле как после перемещения вперед, так и после перемещения назад.
Все это позволяет на установке непрерывного литья получить качественную полосу для широкой номенклатуры сплавов металлов.
Формула изобретения
Система управления вытягивающими валками установки непрерывного литья; содержащая реверсивный электропривод с регулятором скорости, импульс
0
5
0
5
0
5
0
ный датчик перемещения, соединенный последовательно с блоком обработки сигналов, триггер, логическое устройство, четыре счетчика импульсов, соединенных с логическим устройством, генератор импульсов, выход которого соединен с входом логического устройства, и элемент сигнализации, причем один выход блока обработки сигналов датчика перемещения подсоединен к счетному входу первого счгтчи- ка импульсов, а другой - к счетному -зходу третьего счетчика импульсов, отлич ающая с я тем, что, с целью получения качественной полосы из сплавов металлов широкой номенклатуры, устройство снабжено четырьмя цифровыми переключателямиs двумя блоками памяти и двумя преобразователями код - напряжение, причем выходы первого цифрового переключателя подключены к входам предварительной установки числа первого счетчика импульсов и первой части адресных входов первого блока памяти, выход которого соединен с входами предварительной установки числа второго счетчика импульсов, выходы второго цифрового переключателя з к входам предварительной установки числа третьего счетчика импульсов и первой части адресных: входов второго блока памяти, выход которого соединен с входами предварительной установки числа четвертого счетчика импульсов, выход третьего цифрового переключателя - к второй части адресных входов первого блока памяти и цифровым входам первого преобразо - вателя код - напряжение, выходы четвертого цифрового переключателя - к второй части адресных входов второго блока памяти и цифровым входам второго преобразователя код - напряжение, выходы триггера соединены с соответствующими входами логического устройства, выходы логического устройства подсоединены к соответствующим входам сброса и разрешения предварительной установки числа каждого из счетчиков t счетным входам второго и четвертого счетчиков, входам разрешения работы преобразователей код - напряжение, триггера и элемента сигнализации, а выходы преобразовате-, лей код - напряжение подсоединены к входам реверсивного электропривода с регулятором скорости.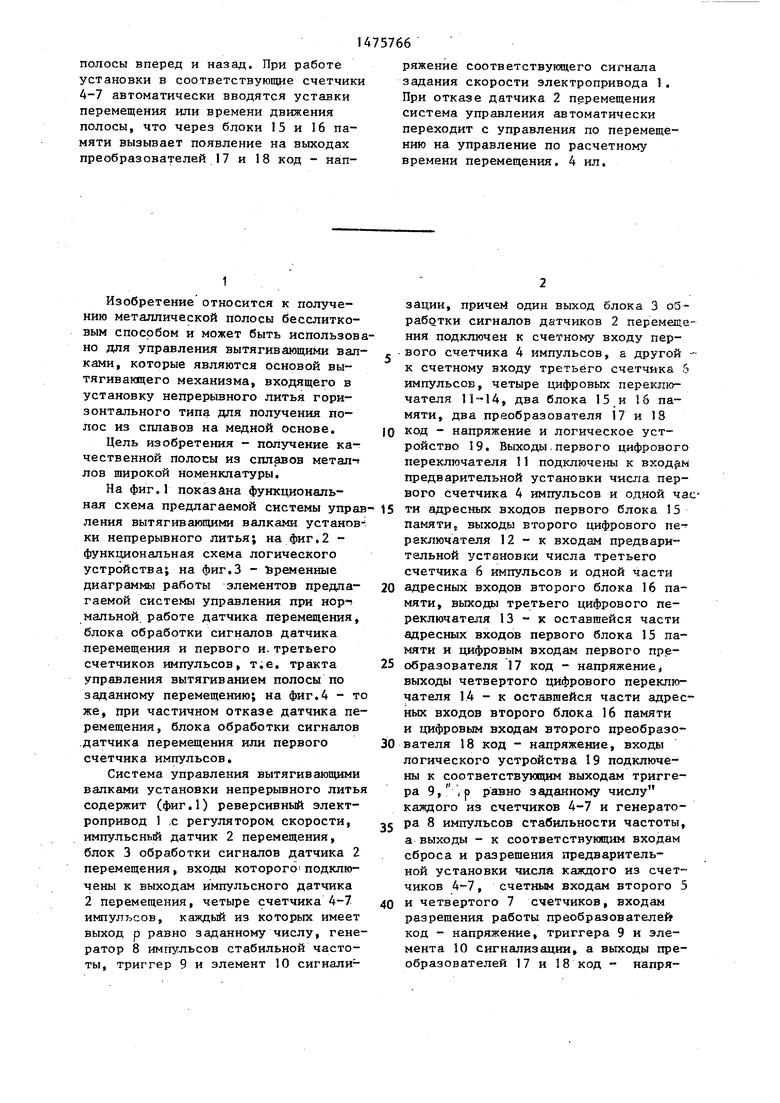
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления перемещением изделия на роликовом конвейере | 1989 |
|
SU1720964A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1991 |
|
RU2077415C1 |
| Устройство для регулирования линейной плотности ленты ленточной машины | 1987 |
|
SU1557207A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1988 |
|
SU1683244A1 |
| Устройство для контроля работы сельскохозяйственных машин для внесения жидкостей | 1988 |
|
SU1676565A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ ДЛЯ РЕВЕРСИРОВАНИЯ ЭЛЕКТРОПРИВОДОВ | 1990 |
|
RU2105342C1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086535A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТАНКОМ | 2009 |
|
RU2420776C1 |
| Устройство для тренировки и контроля подготовленности яхтсменов | 1987 |
|
SU1572663A1 |
| Устройство для управления режимом термообработки бетонных изделий | 1988 |
|
SU1569809A1 |
Изобретение относится к области технических средств для получения металлической полосы преимущественно на медной основе бесслитковым способом и предназначено для управления вытягивающими валками установки непрерывного литья. Цель изобретения - получение качественной полосы из сплавов широкой номенклатуры на установке непрерывного литья. Существо изобретения заключается в том, что при переходе на новую марку сплава переключателями 11-14 задают величины перемещений и скорости движения полосы вперед и назад. При работе установки в соответствующие счетчики 4-7 автоматически вводятся уставки перемещения или времени движения полосы, что через блоки 15,16 памяти вызывает появление на выходах преобразователей 17,18 коднапряжение соответствующего уровня сигнала задания скорости электропривода 1. При отказе датчика 2 перемещения система управления автоматически переходит с управления по перемещению на управление по расчетному времени перемещения. 4 ил.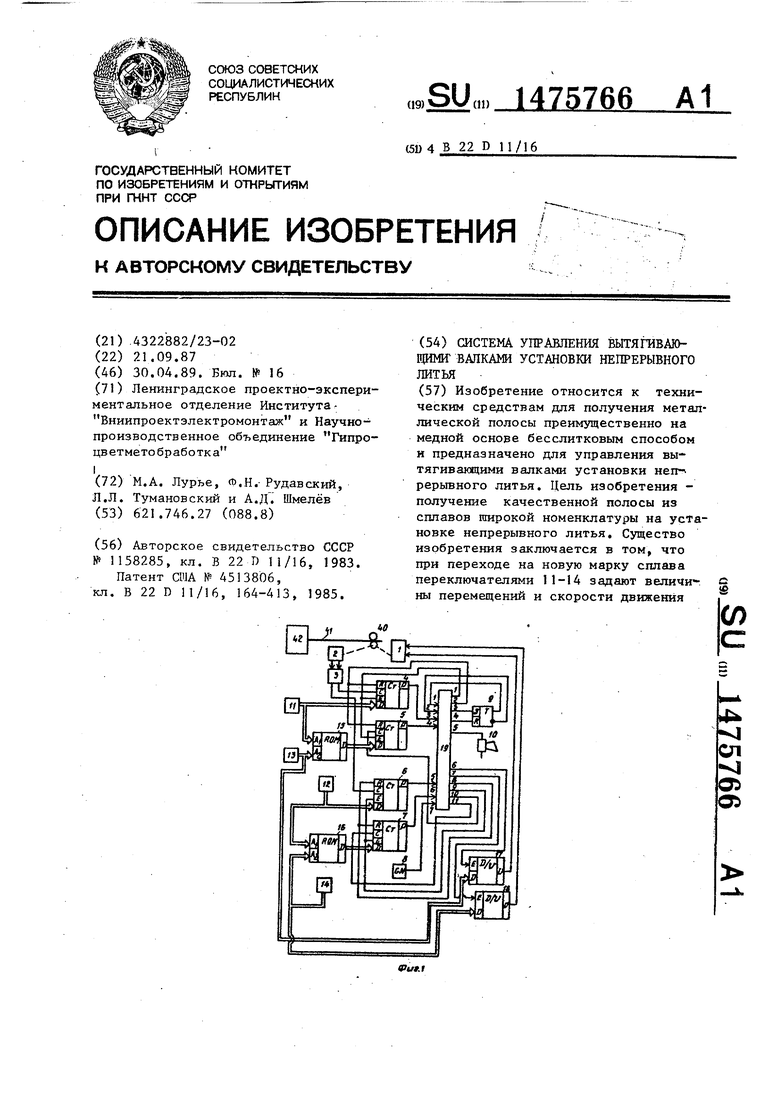
Выстой Д9и#ениг Цистой Мижсние Знстой
после | t freest t Sntpei
tnepei Srttptf
нщаб
Om
freest t Sntpei
нщаб
ti t zЬ
Движение Выстой Движение
вперед после назад
+
f Фиг. 4
после
f Фиг. 4
| Устройство вытягивания слитка машины непрерывного литья заготовок | 1983 |
|
SU1158285A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Патент США № 4513806, кл | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
