Изобретение относится к транспортировке изделий и может быть использовано для автоматического управления перемещением, например, листового проката с помощью роликовых конвейеров в металлургическом производстве и его позиционировании для последующей обработки.
Поль изобретения - повышение надежное-г
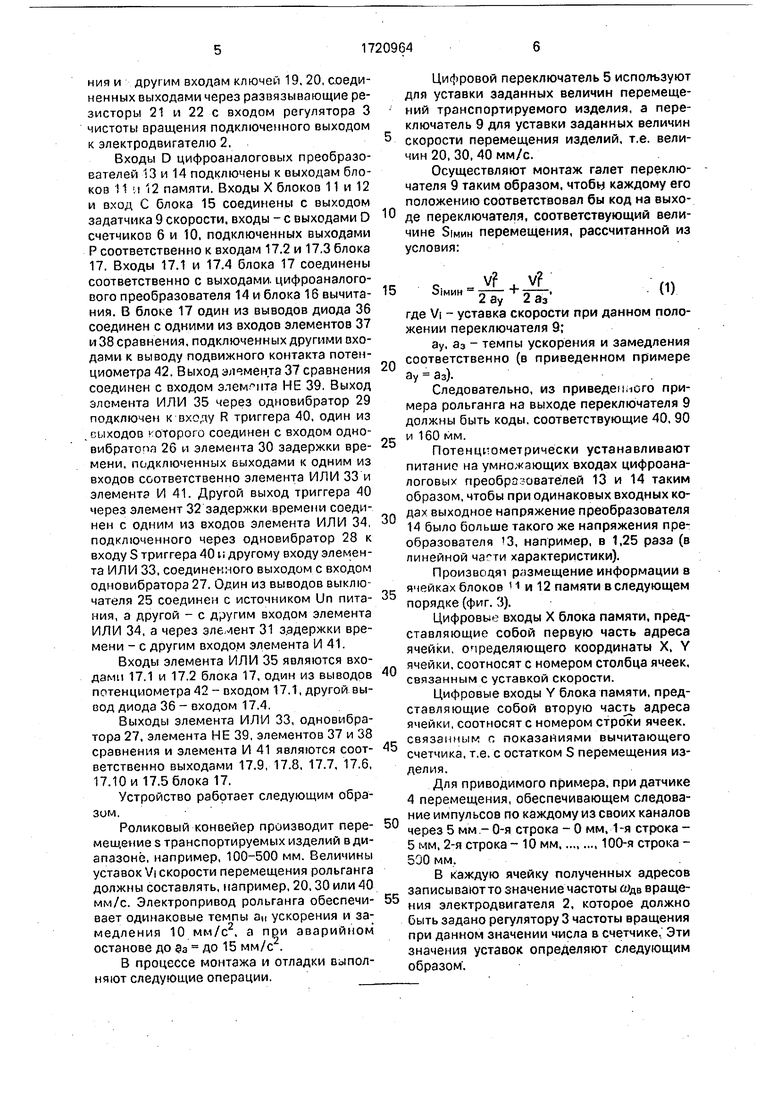
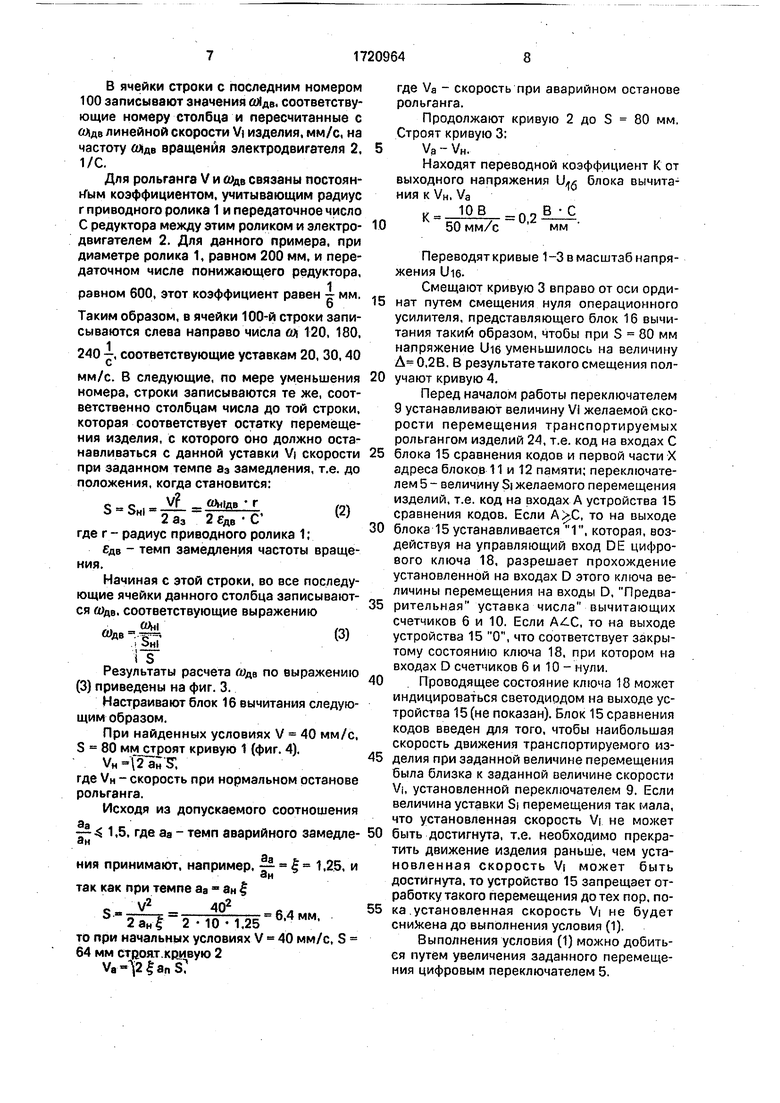
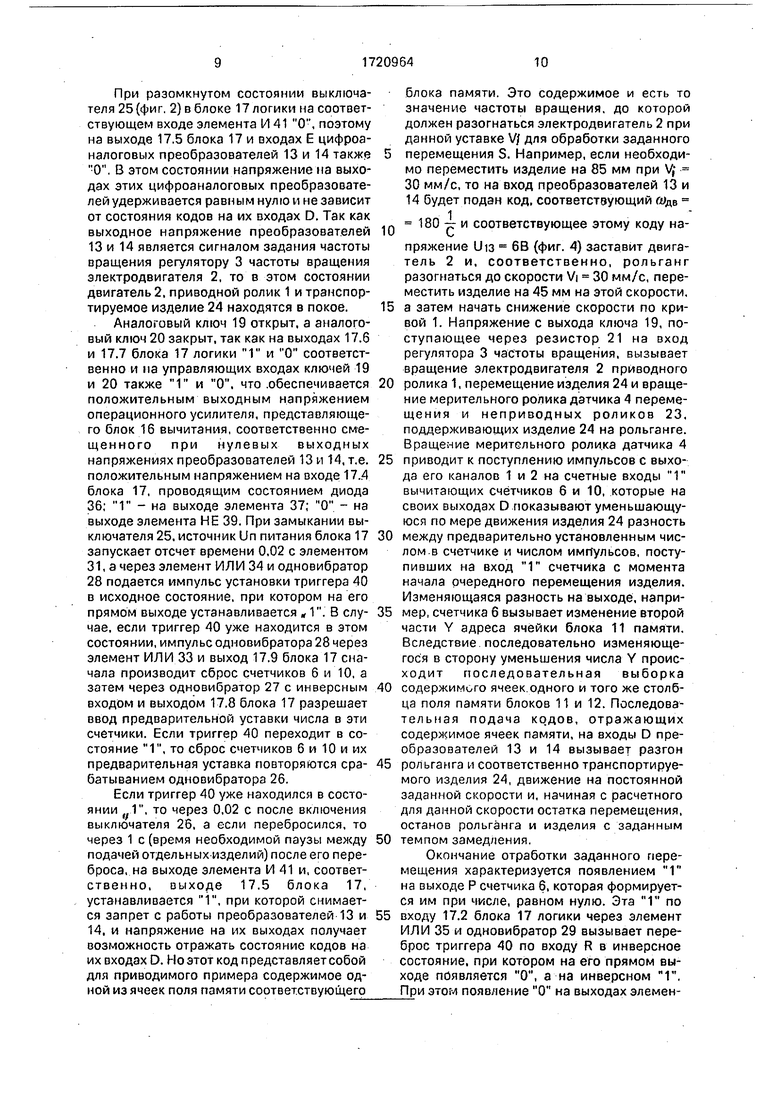
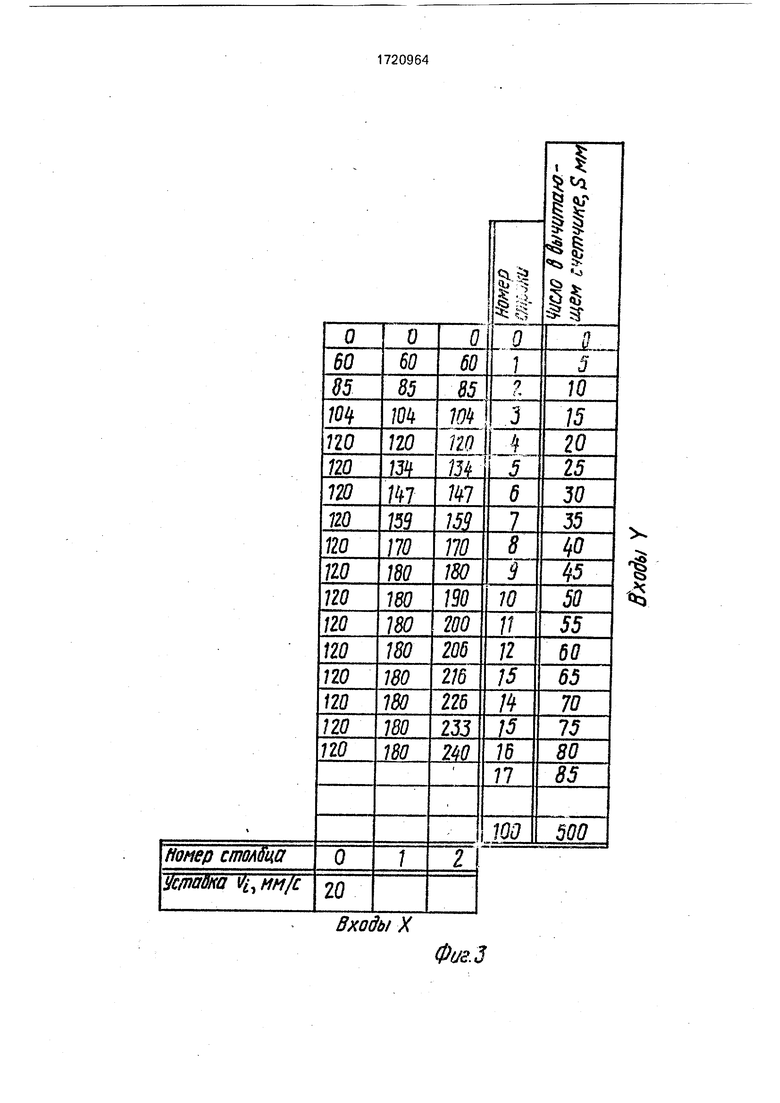
На фиг. 1 изображена функциональная схема устройства: на фиг. 2 - функциональная блок, контроля режимов работы; на фиг. 3 - услов;ч е размещение информации в ячейках б.ч.. i памяти; на фиг. 4 - кривые настройки ;.,; роаналоговых преобразователей и бя А. вычитания.
Устройс1вс ( держит кинематически связанный с роликом 1 конвейера электропривод, включащий электродвигатель 2 и регулятор 3 частоты вращения, двухканаль- ный импульсный датчик 4 перемещения, за- датчик пути, выполненный в виде цифрового переключателя 5, вычитающий счетчик 6 импульсов, элементы 7 и 8 сигнализации, задатчик скорости, выполненный в виде переключателя 9, вычитающий счетчик 10 импульсов, блоки 11 и 12 памяти, цифро аналоговые преобразователи 13 и 14, блок 15 сравнения кодов, блок 16 вычитания, блок 17 контроля рткимов работы с входами 17.1 17.4 и выходами 17,5 17.10,
цифровой ключ 18, аналоговые ключи 19 и 20 и развязывающие резисторы 21 и 22. На приводном ролике 1 и неприводных роликах
23 конвейера показано перемещаемое изделие 24, направление движения которого указано стрелкой.
Блок 17 контроля режимов работы содержит выключатель 25, одновибраторы 2629, элементы 30-32 задержки времени на появление сигнала, элементы ИЛИ 33-35, диод 36, элементы 37 и 38 сравнения, элемент НЕ 39, триггер 40, элемент И 41 и потенциометр 42. Выход ключа 18 соединен
с входом D счетчиков 6 и 10 импульсов. Вход D ключа 18 и вход А блока 15 сравнения кодов подключены к выходу зэдатчика 5 пути.
Вход DE ключа 18 соединен с выходом
блока 15 сравнения кодов. Входы 1 счетчиков 6 и 10 импульсов подключены к выходам датчика 4 перемещения, входы R и С - соответственно к выходам 17,9 и 17.8 блока 17, выходы 17.6 и 17,7 которого соединены
соответственно с одними из входов ключей 19, 20 и элемента 7 сигнализации. Выход 17.10 блока 17 соединен с входом элемента 8 сигнализации, а 17.5 - с входом Е цифро- аналоговых преобразователей 13, 14.. Выходы последних подключены к соответствующим входам блока 16 вычитания и другим входам ключей 19, 20, соединенных выходами через развязывающие резисторы 21 и 22 с входом регулятора 3 чистоты вращения подключенного выходом к электродвигателю 2.
Входы D цифроаналоговых преобразователей 13 и 14 подключены к выходам блоков 11 . 12 памяти. Входы X блоков 11 и 12 и вход С блока 15 соединены с выходом задатчика 9 скорости, входы - с выходами D счетчиков 6 и 10, подключенных выходами Р соответственно к входам 17.2 и 17.3 блока 17. Входы 17.1 и 17.4 блока 17 соединены соответственно с выходами, цифроаналого- вого преобразователя 14 и блока 16 вычитаний. В блоке 17 один из выводов диода 36 соединен с одними из входов элементов 37 и 38 сравнения, подключенных другими входами к выводу подвижного контакта потенциометра 42. Выход элемента 37 сравнения соединен с входом элемента НЕ 39. Выход элемента ИЛИ 35 через одновибратор 29 подключен к входу R триггера 40. один из , выходов которого соединен с входом одно- вибратора 26 и элемента 30 задержки времени, подключенных выходами к одним из входов соответственно элемента ИЛИ 33 и элемента И 41. Другой выход триггера 40 через элемент 32 задержки времени соединен с одним из входов элемента ИЛИ 34, подключенного через одновибратор 28 к входу S триггера 40 и другому входу элемента ИЛИ 33, соединенного выходом с входом одновибратора 27. Один из выводов выключателя 25 соединен с источником Un питания, а другой - с другим входом элемента ИЛИ 34, а через элемент 31 задержки времени - с другим входом элемента И 41.
Входы элемента ИЛИ 35 являются входами 17.1 и 17.2 блока 17, один из выводов потенциометра 42 - входом 17.1, другой вы- оод диода 36 - входом 17.4.
Выходы элемента ИЛИ 33, одновибратора 27, элемента НЕ 39, элементов 37 и 38 сравнения и элемента И 41 являются соответственно выходами 17.9, 17.8, 17.7, 17.6, 17.10 и 17.5 блока 17.
Устройство работает следующим образом.
Роликовый конвейер производит перемещение s транспортируемых изделий в диапазоне, например,100-500 мм. Величины уставок Vi скорости перемещения рольганга должны составлять, например, 20,30 или 40 мм/с. Электропривод рольганга обеспечивает одинаковые темпы а ускорения и замедления 10 мм/с2, а при аварийном останове до аа до 15 мм/с .
В процессе монтажа и отладки выполняют следующие операции.
0
Цифровой переключатель 5 используют для уставки заданных величин перемещений транспортируемого изделия, а переключатель 9 для уставки заданных величин скорости перемещения изделий, т.е. величин 20, 30. 40 мм/с.
Осуществляют монтаж галет переключателя 9 таким образом, чтоби каждому его положению соответствовал бы код на выходе переключателя, соответствующий величине SIMHH перемещения, рассчитанной из условия:
5
0
5
0
5
0
5
0
5
51МИН
V V
(1)
2 ау 2 33
где Vi - уставка скорости при данном положении переключателя 9;
ау, а3 - темпы ускорения и замедления соответственно (в приведенном примере ау а3).
Следовательно, из приведенного примера рольганга на выходе переключателя 9 должны быть коды, соответствующие 40, 90 и 160 мм.
ПотенЦ1 ометричёски устанавливают питание на умножающих входах цифроаналоговых преобразователей 13 и 14 таким образом, чтобы при одинаковых входных кодах выходное напряжение преобразователя 14 было больше такого же напряжения преобразователя 13, например, в 1,25 раза (в линейной части характеристики).
Производят размещение информации в ячейках блоков и и 12 памяти в следующем порядке (фиг. 3).
Цифровые входы X блока памяти, представляющие собой первую часть адресз ячейки, определяющего координаты X, Y ячейки, соотносят с номером столбца ячеек, связанным с уставкой скорости.
Цифровые входы Y блока памяти, представляющие собой вторую часть адреса ячейки, соотносят с номером строки ячеек. связанным с показаниями вычитающего счетчика, т.е. с остатком S перемещения изделия.
Для приводимого примерз, при датчике
4перемещения, обеспечивающем следование импульсов по каждому из своих каналов через 5 мм - 0-я строка - 0 мм, 1-я строка 5мм, 2-я строка - 10 мм,........ 100-я строка 500 мм.
В каждую ячейку полученных адресов записываютто значение частоты й)дв вращения электродвигателя 2, которое должно быть задано регулятору 3 частоты вращения при данном значении числа в счетчике. Эти значения уставок определяют следующим образом .
В ячейки строки с последним номером 100 записывают значения оЛло, соответствующие номеру столбца и пересчитанные с У|ДВ линейной скорости Vi изделия, мм/с, на частоту олдв вращения электродвигателя 2, 1/С.
Для рольганга V и УДВ связаны постоянным коэффициентом, учитывающим радиус г приводного ролика 1 и передаточное число С редуктора между этим роликом и электродвигателем 2. Для данного примера, при диаметре ролика 1, равном 200 мм, и передаточном числе понижающего редуктора,
1 равном 600, этот коэффициент равен - мм.
6
Таким образом, в ячейки 100-й строки записываются слева направо числа (at 120, 180,
240 -, соответствующие уставкам 20, 30,40
С
мм/с. В следующие, по мере уменьшения номера, строки записываются те же, соответственно столбцам числа до той строки, которая соответствует остатку перемещения изделия, с которого оно должно останавливаться с данной уставки Vi скорости при заданном темпе аэ замедления, т.е. до положения, когда становится:
V - вМдв г 2 аэ 2 €дв С где г- радиус приводного ролика 1;
Јдв - темп замедления частоты вращения.
Начиная с этой строки, во все последующие ячейки данного столбца записываются а)цв, соответствующие выражению
« --§7(3)
он
is.
Результаты расчета Ыдв по выражению (3) приведены на фиг. 3.
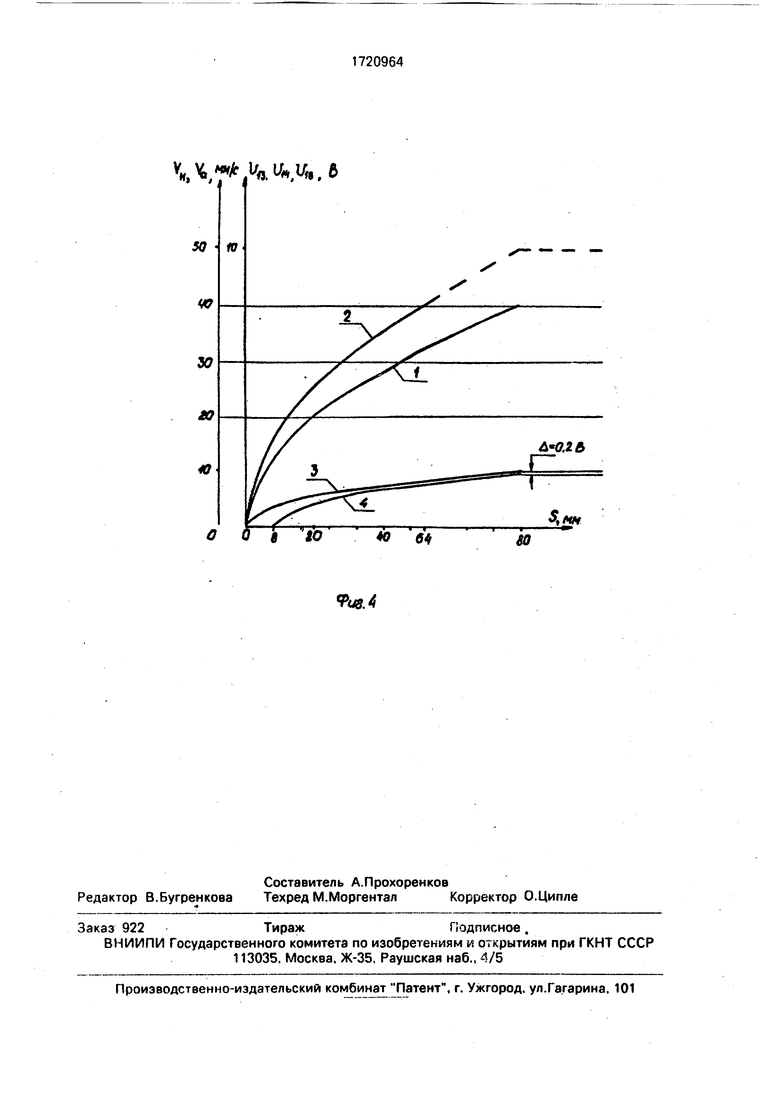
Настраивают блок 16 вычитания следующим образом.
При найденных условиях V 40 мм/с, S 80 мм строят кривую 1 (фиг. 4).
VH-Tzajrs;
где VH - скорость при нормальном останове рольганга.
Исходя из допускаемого соотношения
а- 1,5, где аа - темп аварийного замедлеS SHi
(2)
Эн
За
ния принимают, например. - - Ј 1,25,
так как при темпе аа - Зн |
У402
2а„Ј
аи
: 6,4 мм,
2 10 1,25
то при начальных условиях V 40 мм/с, S 64 мм строят кривую 2 Va- 2ЈanS
где Va - скорость при аварийном останове рольганга.
Продолжают кривую 2 до S 80 мм. Строят кривую 3: 5V9-VH.
Находят переводной коэффициент К от выходного напряжения Ц блока вычитания к VH, Va
К
10В
50 мм/с
0,2
В С
мм
Переводят кривые 1-3 в масштаб напряжения Uie.
Смещают кривую 3 вправо от оси ординат путем смещения нуля операционного усилителя, представляющего блок 16 вычитания такий образом, чтобы при S 80 мм напряжение Ui6 уменьшилось на величину ,2В. В результате такого смещения получают кривую 4.
Перед началом работы переключателем 9 устанавливают величину VI желаемой скорости перемещения транспортируемых рольгангом изделий 24, т.е. код на входах С
блока 15 сравнения кодов и первой части X адреса блоков 11 и 12 памяти; переключателем 5 - величину Si желаемого перемещения изделий, т.е. код на входах А устройства 15 сравнения кодов. Если , то на выходе
блока 15 устанавливается 1,которая, воздействуя на управляющий вход DE цифрового ключа 18, разрешает прохождение установленной на входах D этого ключа величины перемещения на входы D, Предварительная уставка числа вычитающих счетчиков 6 и 10. Если АЈС, то на выходе устройства 15 О, что соответствует закрытому состоянию ключа 18, при котором на входах D счетчиков 6 и 10 -нули.
Проводящее состояние ключа 18 может индицироваться светодирдом на выходе устройства 15 (не показан). Блок 15 сравнения кодов введен для того, чтобы наибольшая скорость движения транспортируемого изделия при заданной величине перемещения была близка к заданной величине скорости Vi, установленной переключателем 9. Если величина уставки Si перемещения так мала, что установленная скорость Vi не может
быть достигнута, т.е. необходимо прекратить движение изделия раньше, чем установленная скорость Vi может быть достигнута, то устройство 15 запрещает отработку такого перемещения до тех пор. пока .установленная скорость Vi не будет снижена до выполнения условия (1).
Выполнения условия (1) можно добиться путем увеличения заданного перемещения цифровым переключателем 5.
При разомкнутом состоянии выключателя 25 (фиг. 2) в блоке 17 логики на соответствующем входе элемента И 41 О, поэтому на выходе 17,5 блока 17 и оходах Е цифроа- налоговых преобразователей 13 и 14 также О. В этом состоянии напряжение на выходах этих цифроаналоговых преобразователей удерживается равным нулю и не зависит от состояния кодов на их входах D. Так как выходное напряжение преобразователей 13 и 14 является сигналом задания частоты вращения регулятору 3 частоты вращения электродвигателя 2, то в этом состоянии двигатель 2, приводной ролик 1 и транспортируемое изделие 24 находятся в покое.
Аналоговый ключ 19 открыт, а аналоговый ключ 20 закрыт, так как на выходах 17.6 и 17.7 блока 17 логики 1 и О соответственно и на управляющих входах ключей 19 и 20 также 1 и О, что .обеспечивается положительным выходным напряжением операционного усилителя, представляющего блок 16 вычитания, соответственно смещенного при нулевых выходных напряжениях преобразователей 13 и 14, т.е. положительным напряжением на входе 17.4 блока 17, проводящим состоянием диода 36; 1 - на выходе элемента 37; О - на выходе элемента НЕ 39. При замыкании выключателя 25. источник Un питания блока 17 запускает отсчет времени 0,02 с элементом 31, а через элемент ИЛИ 34 и одновибратор 28 подается импульс установки триггера 40 в исходное состояние, при котором на его прямом выходе устанавливается 1. В слу- чае, если триггер 40 уже находится в этом состоянии, импульс одновибратора 28 через элемент ИЛИ 33 и выход 17.9 блока 17 сначала производит сброс счетчиков 6 и 10, а затем через одновибратор 27 с инверсным входом и выходом 17.8 блока 17 разрешает ввод предварительной уставки числа в эти счетчики. Если триггер 40 переходит в состояние 1, то сброс счетчиков 6 и 10 и их предварительная уставка повторяются ера- батыванием одновибратора 26.
Если триггер 40 уже находился в состоянии 1, то через 0,02 с после включения выключателя 26, а если перебросился, то через 1 с (время необходимой паузы между подачей отдельных изделий) после его переброса, на выходе элемента И 41 и, соответственно, выходе 17.5 блока 17, устанавливается 1, при которой снимается запрет с работы преобразователей 13 и 14. и напряжение на их выходах получает возможность отражать состояние кодов на их входах D. Ноэтот код представляетсобой для приводимого примера содержимое одной из ячеек поля памяти соответствующего
блока памяти. Это содержимое и есть то значение частоты вращения, до которой должен разогнаться электродвигатель 2 при данной уставке V/ для обработки заданного перемещения S. Например, если необходимо переместить изделие на 85 мм при V; 30 мм/с, то на вход преобразователей 13 и 14 будет подан код. соответствующий шдв
180 тс и соответствующее этому коду наW
пряжение Ui3 6В (фиг. 4) заставит двигатель 2 и, соответственно, рольганг разогнаться до скорости Vi 30 мм/с, переместить изделие на 45 мм на этой скорости, а затем начать снижение скорости по кривой 1. Напряжение с выхода ключа 19, поступающее через резистор 21 на вход регулятора 3 частоты вращения, вызывает вращение электродвигателя 2 приводного ролика 1, перемещение изделия 24 и вращение мерительного ролика датчика 4 перемещения и неприводных роликов 23, поддерживающих изделие 24 на рольганге. Вращение мерительного ролика датчика 4 приводит к поступлению импульсов с выхода его каналов 1 и 2 на счетные входы 1 вычитающих счётчиков 6 и 10, которые на своих выходах D показывают уменьшающуюся по мере движения изделия 24 разность между предварительно установленным числом.в счетчике и числом импульсов, поступивших на вход 1 счетчика с момента начала очередного перемещения изделия. Изменяющаяся разность на выходе, например, счетчика 6 вызывает изменение второй части Y адреса ячейки блока 11 памяти. Вследствие, последовательно изменяющегося в сторону уменьшения числа Y происходит последовательная выборка содержимого ячеек.одного и того же столбца поля памяти блоков 11 и 12. Последовательная подача кодов, отражающих содержимое ячеек памяти, на входы D преобразователей 13 и 14 вызывает разгон рольганга и соответственно транспортируемого изделия 24, движение на постоянной заданной скорости и, начиная с расчетного для данной скорости остатка перемещения, останов рольганга и изделия с заданным темпом замедления.
Окончание отработки заданного перемещения характеризуется появлением 1 на выходе Р счетчика 6, которая формируется им при числе, равном нулю. Эта 1 по входу 17.2 блока 17 логики через элемент ИЛИ 35 и одновибратор 29 вызывает переброс триггера 40 по входу R в инверсное состояние, при котором на его прямом выходе появляется О, а на инверсном 1. При этом появление О на выходах элементов И 31 и 41 на выходе 17.5 блока 17 вызывает наложение запрета на работу преобразователей 13 и 14, что вызывает фиксацию полной остановки рольганга и изделия 24, а появление 1 на входе элемента 32 через 0,02 с вызывает появление Т на выходе этой задержки, которая через элемент ИЛИ 34 и одновибратор 28 вызывает все те операции, которые являются результатом вышеупомянутого включения выключателя 25 (кроме срабатывания элемента 31, на выходе которого состояние 1 неизменно до выключения выключателя 25). После появления Г на входе 17.2 блока 17 появляется 1 на входе 17.3 этого блока, сфор- мированная на выходе Р вычитающего счетчика 10. Это повышает надежность команды на полный останов рольганга.
В случае отказа в работе первого канала датчика 4 перемещения, счетчика 6, блока 11 памяти или преобразователя 13, образующих основной тракт управления рольгангом, напряжение Ui3 на выходе преобразователя 13 либо не появляется, либо падает, либо не начинает или перестает уменьшаться на участке пути останова изделия. Из этих четырех случаев два последних являются аварийными, для предотвращения негативных последствий которых используются второй канал датчика 4 перемещения, счетчик 1.0, блок 12 памяти, преобразователь 14, блок 16 вычитания, а также диод 36 и элемент 37 в блоке 17 логики, образующие аварийный тракт управления, работающий следующим образом.
Напряжение U16 (кривая 4) подают на вход 17.4 блока 17 и через диод 36, поставленный для отсечки напряжения отрицательного знака, на вход исследуемого сигнала элемента 37. Напряжение Ui4 (кри- вая 2) подают на вход 17.1 блока 17 и через потенциометр 42 с коэффициентом деления К 5 - на вход опорного сигнала элемента 37. Таким образом, напряжение на этом входе элемента 37 совпадает с кривой 3 (фиг. 4). Элемент 37 настраивают так, чтобы он срабатывал при. уменьшении разности на его входах, если она становится меньше, чем А 0.2 В (фиг. 4).
Хотя по мере уменьшения S А возраста- ет, что ведет к уменьшению чувствительности аварийного тракта управления, однако увеличенный в 1,25 темп торможения по этому тракту позволяет вовремя остановить транспортируемой изделие. Действительно, если, например, основной тракт отказал на остатке перемещения S - 20 мм, когда скорость рольганга составляет 20 мм/с, то А - 0,2 В наступит на остатке 16,8 мм, и вступивший в работу аварийный тракт остановит рольганг за перемещение:
202
16 мм,
2 -12,5
т.е. даже несколько раньше по времени, чем основной тракт управления.
При скоростях ниже чем 20 мм/с необходимость в работе аварийного тракта отпадает, так ка отсутствие своевременной остановки на низких скоростях рольганга своевременно обнаруживается оператором, который и останавливает его.
При появлении 1 на выходе элемента
37появляется 1 на выходе и О на выходе 17.7 блока 17, и происходит закрывание аналогового ключа 19 и открывание аналогового ключа 20, в результате чего останов рольганга производится управлением от аварийного тракта. При этом срабатывает элемент 7 сигнализации, предупреждая о неисправности основного тракта управления.
При исправной работе основного тракта управления, но отказе в работе второго канала датчика 4 перемещения, счетчика 10, блока 12 памяти или преобразователя 14, образующих аварийный тракт управления, напряжение Ui4 на выходе преобразователя 14 не появляется, либо падает, либо не начинает или перестает уменьшаться на участке пути останова изделия. Из этих четырех случаев два последних свидетельствуют о неисправной работе аварийного тракта, которая, в случае выхода из строя и основного тракта, может привести к аварийной ситуации. Для выявления этих случаев используется и элемент 38. Напряжение Uie (кривая 4) подают на вход исследуемого сигнала элемента 38, работающего в режиме порогового устройства. Напряжение DM (кривая 2) подают с потенциометра 37 на вход опорного сигнала элемента 28. Таким образом, напряжение на входе элемента 38 совпадает с кривой 3 на фиг. 4. Элемент 38 настраивают так, чтобы он срабатывал при увеличении разности на его входах, если она становится больше, чем А 0,6 В (максимальное рассогласование при 8 8 мм).
При появлении 1 на выходе элемента
38появляется 1 на выходе 17.10 блока 17 и срабатывает элемент 8 сигнализации - лампа, предупреждающая о неисправности аварийного тракта управления.
Формула изобретения Устройство для управления перемещением изделия на роликовом конвейере, содержащее задатчик пути и задатчик скорости, подключенный выходом к одному
из входов блока сравнения кодов, счетчики импульсов, датчик перемещения, блок памяти, ключи и электропривод, отличающееся тем, что, с целью повышения надежности, оно снабжено блоками контроля режимов работы и вычитания, цифроанало- говыми преобразователями, дополнительными блоками памяти и ключом, развязывающими резисторами и элементами сигнализации, причем выход дополнительного ключа соединен с одним из входов счетчиков импульсов, один из его входов и другой вход блока сравнения подключены к выходу задатчика пути, а другой выход соединен с выходом блока сравнения кодов, другие входы счетчиков импульсов подключены к выходам датчика перемещения, третьи и четвертые входы - соответственно к первому и второму выходам блока контроля режимов работы, третий и четвертый выходы которого соединены соответственно с одними из входов ключей и одного из элементов сигнализации, пятый выход соединен с входом другого элемента сигнализации, а шестой -с одними входов цифроаналоговых преобразователей, выходы которых подключены к соответствующим входам блока вычитания и к другим входам ключей, соединенных выходами через развязывающие резисторы с входом электропривода, другие входы цифроаналоговых преобразователей подключены к выходам блока памяти и дополнительного блока памяти, одни из входов которых соединены с выходом задатчика скорости, а другие - с одними из выходов соответствующих счетчиков импульсов, подключенных другими выходами соответственно к первому и второму входам блока контроля режимов работы, третий и четвертый входы которого
соединены с выходами соответственно одного из цифроаналоговых преобразователей и блока вычитания, при этом блок контроля режимов работы включает элемен- 5 ты И, ИЛИ, НЕ, сравнения, задержки времени на появление сигнала, триггер. . потенциометр, выключатель и диод, один вывод которого соединен с одними из входов элементов сравнения, подключенных
0 другими входами к выводу подвижного контакта потенциометра, выход одного из элементов сравнения соединен с входом элемента НЕ, выход первого элемента ИЛИ через первый одновибратор подключен к
5 одному из входов триггера, один из выходов которого соединен с входом второго одно- вибратора и первого элемента задержки времени, подключенных выходами к одним из входов соответственно второго элемента
0 ИЛИ и элемента И, другой выход триггера через второй элемент задержки времени соединен с одним из входов третьего элемента ИЛИ, подключенного через третий одновибратор к другому входу триггера и второго
5 элемента ИЛИ, соединенного выходом с входом четвертого рдновибратора, один из выводов выключателя соединен с исгочни ком питания, а другой - с другим входом третьего элемента ИЛИ, а через третий эле0 мент задержки времени - с другим входом элемента И, входы первого элемента ИЛИ являются первым и вторым входами блока контроля режимов работы, один из выводов потенциометра - третьим входом, а другой
5 вывод диода - четвертым, выходы второго элемента ИЛИ, четвертого одновибратора, элемента НЕ, первого и второго элементов сравнения и элемента И являются соответственно первым-шестым выходами блока
0 контроля режимов работы.
я; т
173
т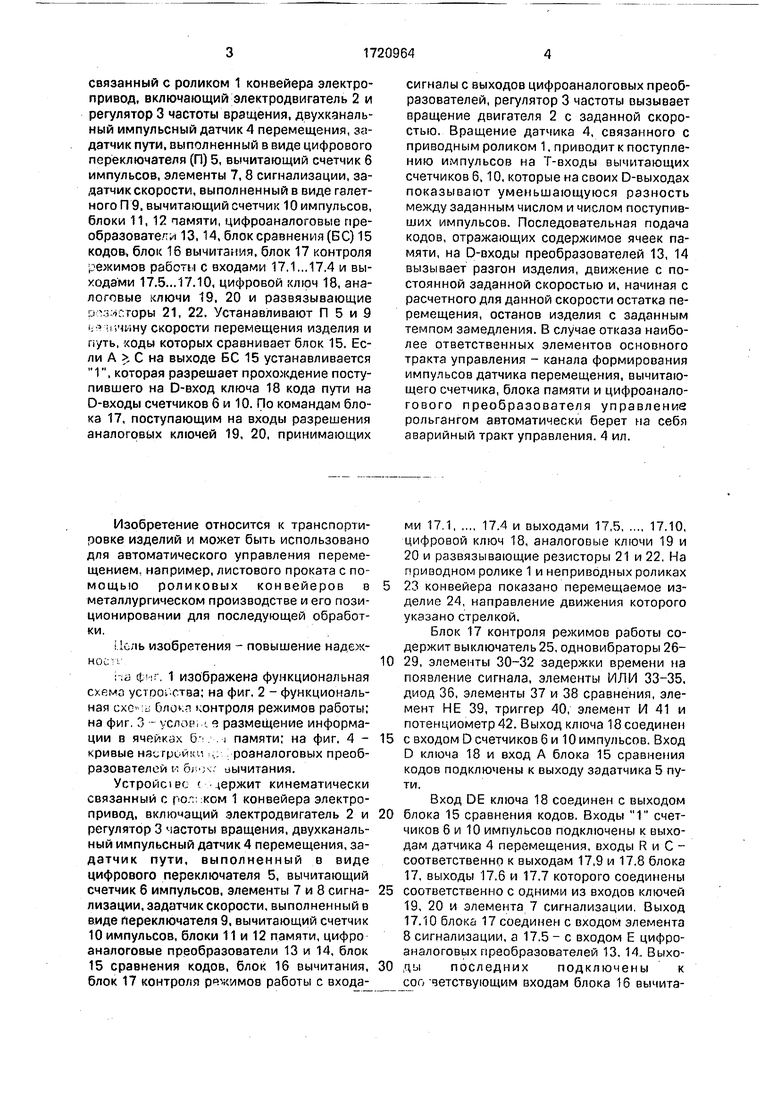

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления вытягивающими валками установки непрерывного литья | 1987 |
|
SU1475766A1 |
| СИГНАЛИЗАТОР ПРЕДЕЛЬНЫХ ЗНАЧЕНИЙ УГЛОВОЙ СКОРОСТИ | 1991 |
|
RU2012891C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ НЕРОВНОСТЕЙ КОЛЕСНЫХ ПАР ПОДВИЖНОГО СОСТАВА12 | 1973 |
|
SU384711A1 |
| Устройство для определения объемного расхода жидкости | 1989 |
|
SU1723440A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ОСЕВОГО ПЕРЕМЕЩЕНИЯ ВАЛА | 1996 |
|
RU2129212C1 |
| Устройство для автоматическогоРАСпРЕдЕлЕНия ТРуб пО пОТОчНыМ лиНияМиХ ОТдЕлКи | 1979 |
|
SU806186A1 |
| Регулятор-ограничитель мощности турбоагрегата | 1984 |
|
SU1231559A1 |
| Устройство допускового контроля параметров | 1991 |
|
SU1798719A1 |
| Устройство допускового контроля параметров | 1991 |
|
SU1800380A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1992 |
|
RU2038694C1 |

Изобретение относится к транспортировке изделий и может быть использовано для автоматического управления перемещением, например, листового проката с помощью роликовых конвейеров в металлургическом производстве и его позиционирования для последующей обработки. Цель изобретения - повышение надежно- сш. Устройство содержит кинематически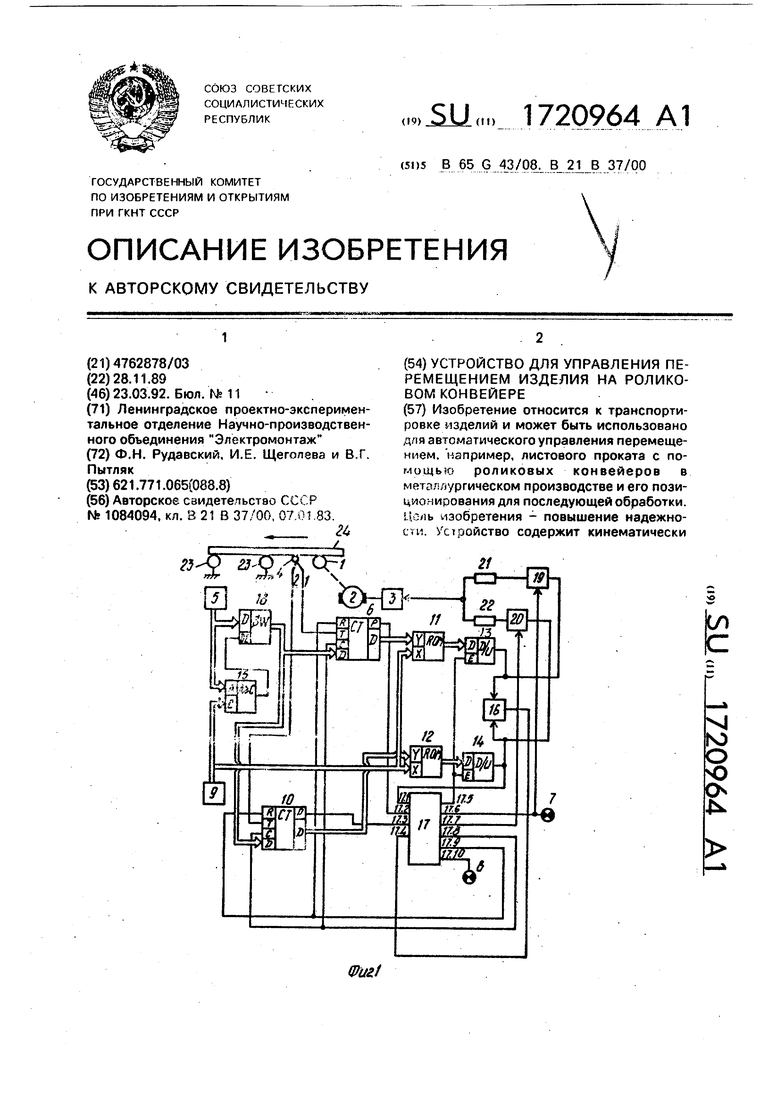
Фиг. I
Входы X
8 4
Фиг.З
VV1..
Л
ю
iff
X
го
ю
.26
| Устройство для управления безупорным остановом перемещающейся заготовки | 1983 |
|
SU1084094A2 |
| Ручной ткацкий станок | 1923 |
|
SU821A1 |
| & | |||
