Фи.г.2
11
Изобретение относится к железнодорожной автоматике и может быть использовано для контроля состояния участков рельсовой линии.
Цель изобретения - повышение точности контроля,
На фиг.1 представлен график разложения сигнала на составляющие; на фиг.2 - блок-схема устройства, реали 3yrat4e.ro предлагаемый способ.
Устройство содержит подключенный к рельсовым нитям 1, ограниченным изолирующими стыками 2 через согласующий элемент 3, источник 4 питания На релейном конце к рельсовым нитям 1 через второй сргласукпчнн хтем(дн г 5 подключен детектор 6, выход кото рого соединен с управляющим входом 7 аналого-цифрового преобразовате- ля (А1Щ) 8. Выход преобразователя 8 подключен к входу микропроцессора 9, один из выходов которого подключен к управляющему входу 10 AITJI 8, а второй -к обмотке пулевого реле 11
Устройство работает следующим образом.
Источник А выдает через согласующий элемент 3 сигнал переменного тока в рельсовую линию, При отсут- ствии в пределах рельсозй линии, ограниченной изолирующими стыками, подвижного состава сигнал на релейном конце постоянен по уровню во времени (изменение сигнала из-за коле- баний сопрот шлення изо гяции медленнее) , а абсолютное значение это;о уровня не ниже некоторой расчетной величины, определяемой из условия отсутствия стоящего шунта. При этом нормативная величина стоящего шунта
R может быть принята меньше поршнематнвной величины шунта Кычс - R U|H 0,06 Ом. При наличии же в пределах рельсовой цепи стоящего пунта уро- венъ сигнала на релейном конце низок (рассчитывается из условия R ЫН ), а движущегося шунта возможно и высок но переменен во времени. Сигнал на релейном конце через согласующий элемент 5 поступает на детектор 6, выделяющий огибающую сигнала (пунктирная линия, фиг.1 I и далее на управляющий вход 7 ЛЦП 8. Микропроцессор 9 с заданной дискрш ностью подает сигнал на управляющий вход 10 АЦП 8.
Б моменты подачи этих управляющих сигналов осуществляется преобразование аналогового сигнала огибающей в цифровую форму и его подача на вход микропроцессора 9. Микропроцессор 9 осуществляет обработку п отсчетов Т1; и на основе результатов обработки возбуждает либо не возбуждает путевое реле 11. В процессе обработки определяется средняя величина сигнала при п отсчетах U,
Т п.
/ и;
СР
, а также наличие переменной составляющей огибающей сигнал при тех же п отсчетах. Алгоритмы обработки с целью выделения уровня переменной составляющей могут быть самыми разнообразными. Например, может быть рассмотрена величина А
П-1
(U,4, Гс) либо Аа U „о,кс н при п отсчетах. Возможны и другие алгоритмы. Путем сравнения рассчитанной величины с заданным пороговым значением микропроцессор принимает решение о наличии или отсутствии движущегося шунта. Таким образом, после каждых п отсчетов в зависимости от рассчитанной величины UСр (определяет наличие или отсутствие стоящего шунта) и одного из критериев 1А,|, Aj или какого-либо другого), определяющего наличие или отсутствие движущегося шунта, микропроцессор принимает одно из двух решений: возбудить путевое реле 11 (рельсовая цепь свободна ) либо его обесточить (рельсовая цепь занята).
Использование предлагаемого способа дает возможность рассчитывать шунтовой режим работы рельсовых цепей исходя из нормативной величины стоящего шунта Р laiwc . Как показали массовые эксперименты, величина может быть принята равной 0,03 Ом. Выполненные расчеты дают возможность утверждать, что при фиксированной длине рельсовой цепи указанное снижение расчетной нормативной величины сопротивления поездного шунта обеспечивает снижение минимального рабочего сопротивления изляции не менее чем в 1,5 раза. Таким образом, основной рабочий показатель качества работы рельсовой цепи - минимальное рабочее сопротивление изоляции - снижается (улучшается ) в 1 , раза .
3147
Формула изобретения Способ контроля свободного состояния рельсовой линии, при котором на питающем конце в рельсовую цепь подают управляющий сигнал, а на приемном конце определяют среднее значение амплитуды принятого сигнала, сравнивают с допустимым значением и по результатам сравнения определяют свободность или занятость рельсовой линии, отличающий
П4
с я тем, что, с целью повышения точности контроля, на приемном конце определяют амплитуды сигналов последовательно во времени, сравнивают амплитуду сигнала в предыдущий момент времени с амплитудой в последующий момент времени, определяют приращения сигнала, суммируют эти приращения, а среднее значение сигнала определяют по упомянутой сумме приращения.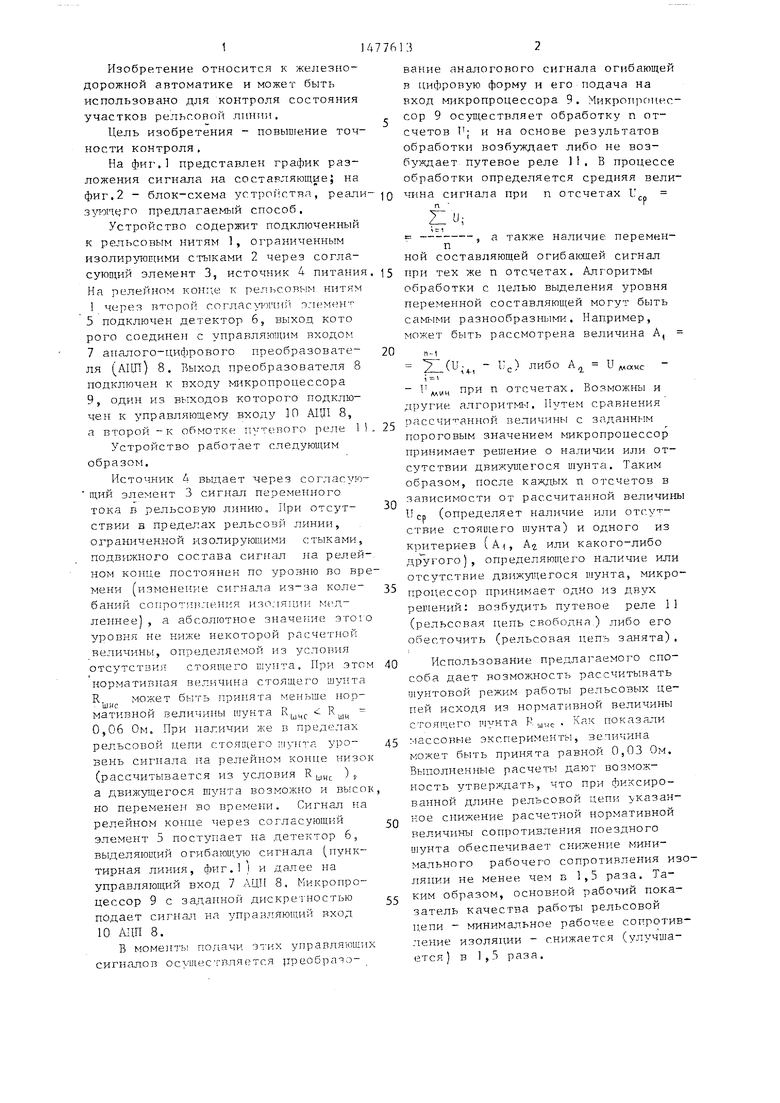
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля свободного состояния рельсовой линии | 1987 |
|
SU1491761A1 |
| Способ проверки выполнения шунтового режима работы электрической рельсовой цепи | 2022 |
|
RU2791474C1 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ ПУТЕВОГО УЧАСТКА И ФАЗОЧУВСТВИТЕЛЬНАЯ РЕЛЬСОВАЯ ЦЕПЬ | 1991 |
|
RU2025362C1 |
| Рельсовая цепь | 1979 |
|
SU816841A1 |
| Способ измерения сопротивления поездного шунта | 2024 |
|
RU2827533C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВЫХ ЦЕПЕЙ | 2007 |
|
RU2341395C2 |
| Способ управления автоматической переездной сигнализацией | 2016 |
|
RU2628042C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ ЛИНИИ | 2010 |
|
RU2423268C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВЫХ ЦЕПЕЙ | 2017 |
|
RU2666000C2 |
| СПОСОБ КОНТРОЛЯ СВОБОДНОСТИ РЕЛЬСОВОЙ ЛИНИИ | 2007 |
|
RU2362699C1 |
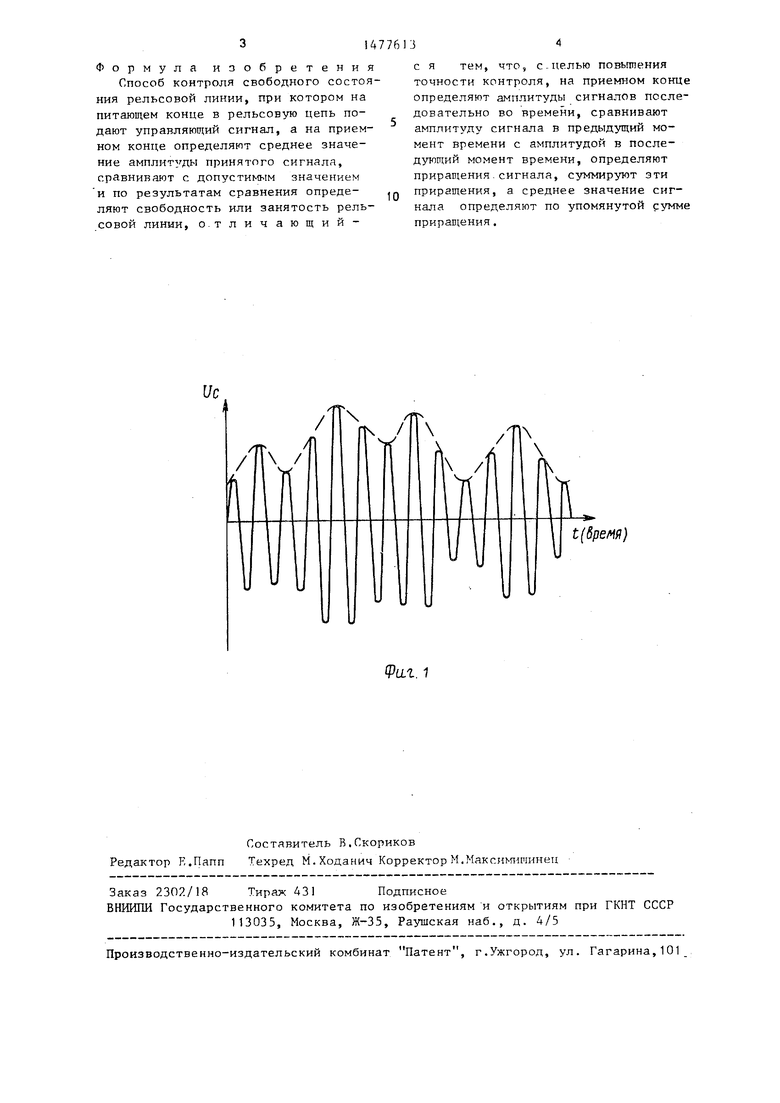
Изобретение относится к железнодорожной автоматике и может быть использовано для контроля состояния участков рельсовой линии. Цель изобретения - повышение точности контроля. Источник 4 выдает через согласующий элемент 3 сигнал переменного тока в рельсовую линию. Из рельсовой линии сигнал передается через согласующий элемент 5 на детектор 6. Затем огибающая сигнала поступает на аналого-цифровой преобразователь 8 и далее информация в цифровом виде вводится в микропроцессор 9. Микропроцессор производит обработку полученных отсчетов U. При этом определяется среднее значение и производится анализ наличия переменной составляющей в огибающей измеренного сигнала. Затем выносится решение о наличии или отсутствии поездного шунта. 2 ил.
t (бремя)
Фиг 1
| Способ контроля рельсовой цепи | 1976 |
|
SU770897A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
