Известен способ управления автоматической переездной сигнализацией, реализованный в устройстве, в котором на питающем конце в рельсовую линию подаются зондирующие импульсы и по времени поступления отраженных импульсов от колесной пары поезда вычисляется скорость и координата поезда и принимается решение о закрытии переезда (Авторское свидетельство СССР №1342796, МПК B61L 29/32, опубл. БИ №37, 1987 г. «Устройство для автоматического ограждения переезда», авторы Е.Г. Угрюмов, Ю.А. Бакулин, Ю.А. Ерохин).
Недостатком способа является низкая точность определения координаты поезда из-за высокой его чувствительности к изменениям первичных параметров рельсовой линии, а именно, продольного сопротивления рельсовой линии, увеличение которой приводит к значительным затуханиям зондирующих импульсов и появлению паразитных импульсов вносящих погрешности в определении скорости поезда, а соответственно низкая безопасность движения.
Известен также способ управления автоматической переездной сигнализацией, заключающийся в том, что в рельсовую линию на питающем конце непрерывно подают сигнал переменного тока и на том же конце непрерывно измеряют амплитуду напряжения и тока и по предварительно измеренным амплитудам напряжения и тока при различных значениях координаты расположения поездного шунта от релейного до питающего конца рельсовой линии формируют множество значений напряжения U1, тока и соответствующих им координат поезда  , с помощью которых составляют систему уравнений координаты расположения поезда, правую часть которой приравнивают к значениям координат поезда , и, решая систему уравнений, определяют коэффициенты
, с помощью которых составляют систему уравнений координаты расположения поезда, правую часть которой приравнивают к значениям координат поезда , и, решая систему уравнений, определяют коэффициенты  уравнения координаты поезда затем, измеряя текущее значение напряжения и тока, уравнением координаты поезда определяют текущую координату на участке приближения и определяют скорость поезда на участке, а с учетом возможного ускорения поезда, определяют фактическую координату закрытия переезда (Патент РФ на изобретение RU №2281219 С1, кл. B61L 29/22, опубл. БИ №22, 2006 г. «Способ управления автоматической переездной сигнализацией», автор Е.М. Тарасов).
уравнения координаты поезда затем, измеряя текущее значение напряжения и тока, уравнением координаты поезда определяют текущую координату на участке приближения и определяют скорость поезда на участке, а с учетом возможного ускорения поезда, определяют фактическую координату закрытия переезда (Патент РФ на изобретение RU №2281219 С1, кл. B61L 29/22, опубл. БИ №22, 2006 г. «Способ управления автоматической переездной сигнализацией», автор Е.М. Тарасов).
Недостатком способа является низкая безопасность движения из-за низкой точности определения координаты поезда, а соответственно, и его скорости, т.к. вследствие механических и климатических воздействий на рельсовые линии изменяются ее первичные параметры и нарушается соответствие значений напряжений и токов координате поезда при определении коэффициентов уравнения координаты поезда, и следовательно, при определении текущей координаты поезда с предварительно определенными коэффициентами уравнения координаты поезда, появляется ошибка, которая со временем увеличивается. Скорость, определенная при ошибочной координате неточная, и это приводит к неверному определению фактической координаты закрытия переезда и нарушению безопасности движения поездов.
Данное техническое решение выбрано авторами в качестве прототипа.
Техническим результатом, на достижение которого направлено данное изобретение, является повышение безопасности движения за счет повышения точности определения координаты и скорости поезда, а следовательно и фактической координаты закрытия переездных ограждающих устройств за счет верификации определенной уравнением координаты расположения поезда текущей координаты с координатой начала участка приближения фиксированной длины, при неравенстве значений, т.е. появлении ошибки, корректируя коэффициенты уравнения координаты поезда, добиваются равенства вычисленной координаты поезда фактической координате, затем определяют скорость поезда и фактическую точную координату закрытия переезда.
Технический результат достигается тем, что в рельсовую линию на питающем конце непрерывно подают сигнал переменного тока и на том же конце непрерывно измеряют амплитуду напряжения и тока при различных значениях координаты расположения поездного шунта от релейного до питающего конца рельсовой линии и формируют множество измеренных значений напряжения U1, тока I1 и соответствующих им координат поезда , с помощью которых составляется система уравнений координаты расположения поезда, правую часть приравнивают к значениям координат поезда и, решая систему
 , i=1, 2, …, n,
, i=1, 2, …, n,
где  - координаты расположения поезда, при которых измерены U1ij и I1ij; определяют коэффициенты уравнения координаты поезда, затем, измеряя текущее значение напряжения и тока, определяют текущую координату поезда на участке приближения
- координаты расположения поезда, при которых измерены U1ij и I1ij; определяют коэффициенты уравнения координаты поезда, затем, измеряя текущее значение напряжения и тока, определяют текущую координату поезда на участке приближения
 ,
,
а скорость поезда на участке определяют по формуле
 ,
,
где i - текущая координата поезда,
 - предыдущая координата, пройденная поездом за время
- предыдущая координата, пройденная поездом за время  ,
,
и с учетом возможного его ускорения определяют фактическую координату закрытия переезда по формуле:
 , i=1, 2, …, n,
, i=1, 2, …, n,
где - длина участка приближения к переезду,
- длина участка приближения к переезду,
 - время, необходимое для закрытия переезда (табличное значение),
- время, необходимое для закрытия переезда (табличное значение),
ai - ускорение движения поезда на участке приближения, вычисляемое по кривой скорости поезда,
согласно изобретению в момент вступления поезда на участок приближения сравнивают текущую координату поезда , определенную уравнением, с длиной участка приближения, при неравенстве значений корректируют коэффициенты уравнения координаты поезда, при равенстве значений -определяют скорость поезда и при его ускорении определяют фактическую координату и время закрытия переезда.
В основе способа управления переездными ограждающими устройствами лежит определение точной фактической координаты закрытия переезда, и обеспечение минимального времени закрытого состояния переездов. Каждый раз, в момент вступления поезда на участок приближения переезда осуществляют верификацию вычисленной уравнением координаты поезда с координатой начала участка приближения фиксированной длины и при неравенстве значений, корректируя коэффициенты уравнения координаты поезда, добиваются равенства вычисленной координаты поезда фактической координате поезда, а затем определяют скорость поезда и с учетом возможного его ускорения вычисляют фактическую координату закрытия переезда, и по ним управляют ограждающими устройствами переезда. Координату и скорость поезда определяют по значению скорректированного уравнения координаты поезда, аргументами в которой являются измеренные значения амплитуд напряжения и тока на питающем конце рельсовой цепи участка приближения.
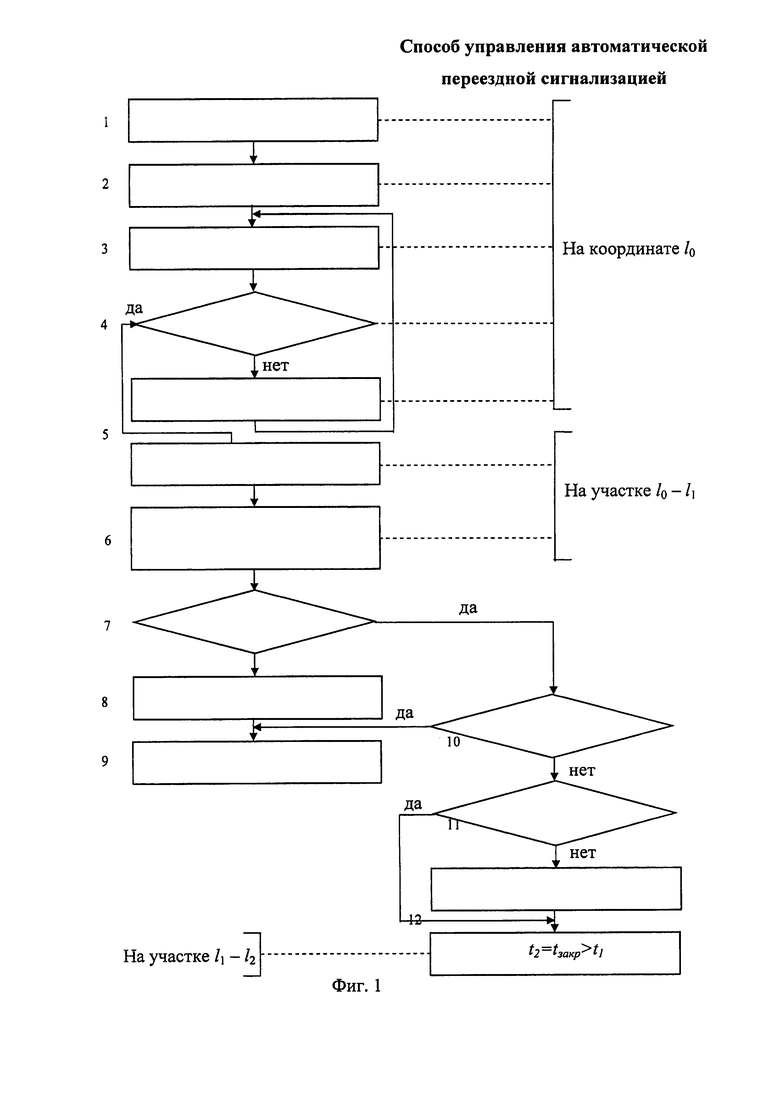
На фиг. 1 изображена блок-схема алгоритма работы автоматической переездной сигнализации.
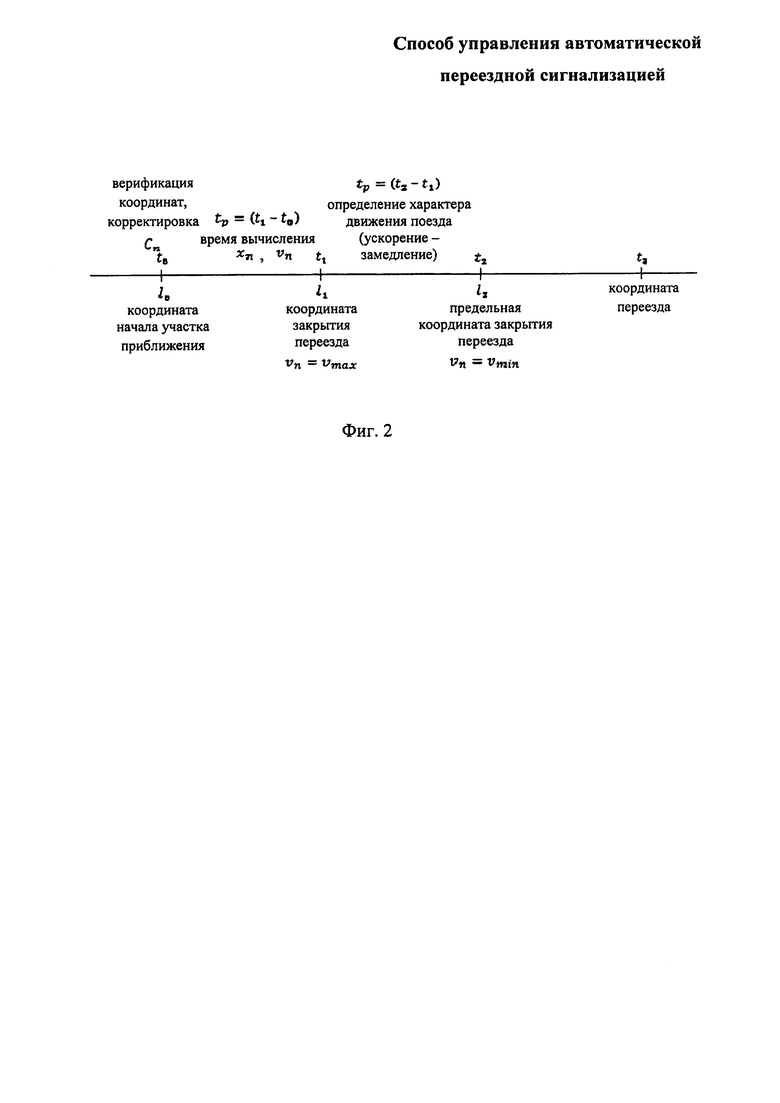
На фиг. 2 представлены временные интервалы функционирования системы.
Способ осуществляется следующим образом.
При вступлении поезда на участок приближения (t0, l0) (фиг. 2) фиксируется момент вступления поезда на участок приближения (шаг 1) (фиг. 1) и начинается непрерывное измерение амплитуды напряжения U1 и тока I1 на питающем конце рельсовой цепи участка приближения ((t0, l0), шаг 2). По измеренным значениям по формуле
 ,
,
вычисляют текущую координату  в момент вступления поезда на участок приближения к переезду (шаг 3) и эта вычисленная координата сравнивается с фактической координатой головы поезда xф на релейном конце рельсовой линии участка приближения (по координате изолирующего стыка релейного конца), проверяют условие
в момент вступления поезда на участок приближения к переезду (шаг 3) и эта вычисленная координата сравнивается с фактической координатой головы поезда xф на релейном конце рельсовой линии участка приближения (по координате изолирующего стыка релейного конца), проверяют условие  (шаг 4). При неравенстве значений, корректируя коэффициенты уравнения координаты поезда и циклически возвращаясь к определению текущей координаты поезда, коэффициенты корректируются до тех пор, пока не достигнет равенство вычисленной и фактической координат (t0, l0). После достижения равенства вычисленной координаты поезда фактической координате поезда циклически измеряют текущие значения напряжения U1i и тока I1i на питающем конце рельсовой цепи участка приближения (шаг 5). По скорректированному уравнению координаты поезда определяют его текущую координату поезда и скорость поезда
(шаг 4). При неравенстве значений, корректируя коэффициенты уравнения координаты поезда и циклически возвращаясь к определению текущей координаты поезда, коэффициенты корректируются до тех пор, пока не достигнет равенство вычисленной и фактической координат (t0, l0). После достижения равенства вычисленной координаты поезда фактической координате поезда циклически измеряют текущие значения напряжения U1i и тока I1i на питающем конце рельсовой цепи участка приближения (шаг 5). По скорректированному уравнению координаты поезда определяют его текущую координату поезда и скорость поезда  на участке приближения (шаг 6) по формуле:
на участке приближения (шаг 6) по формуле:
 ,
,
и с учетом возможного его ускорения определяет фактическую координату закрытия переезда
 i=1, 2, …, n,
i=1, 2, …, n,
где - длина участка приближения к переезду,
 - время, необходимое для закрытия переезда, которое зависит от типа переезда и таблично задается (В.Д. Бубнов, В.С. Дмитриев. Устройства СЦБ их монтаж и обслуживание: Полуавтоматическая и автоматическая блокировка. М.: Транспорт, 1989. - С. 304),
- время, необходимое для закрытия переезда, которое зависит от типа переезда и таблично задается (В.Д. Бубнов, В.С. Дмитриев. Устройства СЦБ их монтаж и обслуживание: Полуавтоматическая и автоматическая блокировка. М.: Транспорт, 1989. - С. 304),
a1 - ускорение движения поезда на участке приближения, вычисляемое по кривой скорости поезда для конкретного переезда (А.М. Бабичков, П.А. Гурский, А.П. Новиков. Тяга поездов и тяговые расчеты. М.: Транспорт, 1971. - С. 280).
Затем проверяют условие vф<vmax (шаг 7), если «нет», то констатируется факт равенства vф=vmax на участке приближения (шаг 8) (т.к. vф не может быть больше vmax), и с координаты l1 или времени t1 закрывают шлагбаум (шаг 9). Если имеет место условие «да», то проверяют ускорение: если скорость увеличивается (шаг 10), то также шлагбаум закрывают с координаты l1 или времени t1 (шаг 9). Если скорость уменьшается (шаг 11), то с координаты l1 до l2 или времени t1 до t2 корректируется задержка времени включения шлагбаума (tp=t3-t1). Если скорость vф=vmax, то шлагбаум закрывают в момент времени t1, а т.к. скорость большая, то излишнего времени на ожидание нет (tp=30-40 с). Если минимальная vф=vmin то и время закрытого состояния переезда небольшое от t2 до t3 (tp=t2-t3) (шаг 13). Если скорость поезда vф<vmax, но постоянна (шаг 12), то также вычисляют координату, с которой производят закрытие переезда, и время закрытого состояния переезда tp также небольшое(шаг 13).
В качестве функции напряжения и тока в уравнении координаты поезда  используют ортогональные многочлены Лежандра, Лагерра, Эрмита, Лорана или степенной полином Колмогорова-Габора. Коэффициенты
используют ортогональные многочлены Лежандра, Лагерра, Эрмита, Лорана или степенной полином Колмогорова-Габора. Коэффициенты  - предварительно определяют следующим образом.
- предварительно определяют следующим образом.
Априорно измеряют амплитуды напряжения и тока на питающем конце рельсовой линии в зависимости от координат нахождения поезда и формируют массив данных в виде
 - координата вступления поезда на участок приближения
- координата вступления поезда на участок приближения
 текущие координаты поезда
текущие координаты поезда
 - координата переезда,
- координата переезда,
где  - длина рельсовой линии участка приближения. По полученным данным составляют систему уравнений координаты поезда в виде
- длина рельсовой линии участка приближения. По полученным данным составляют систему уравнений координаты поезда в виде

и, решая систему, как, например, методом Гаусса, определяют искомые коэффициенты  , которые формируют уравнение координаты поезда. Данный прием широко применяется при интерполяции функций для получения интерполяционного уравнения процессов (И.Н. Бронштейн, К.А. Семендяев. Справочник по математике. - М.: Наука, 1980 - 976 с.).
, которые формируют уравнение координаты поезда. Данный прием широко применяется при интерполяции функций для получения интерполяционного уравнения процессов (И.Н. Бронштейн, К.А. Семендяев. Справочник по математике. - М.: Наука, 1980 - 976 с.).
Корректировка коэффициентов уравнения координаты поезда осуществляют алгоритмом корректирующих приращений (Дж Ту, Гонсалес Р. Принципы распознавания образов. - М.: Мир, 1978. - С. 247-250).
Предлагаемый способ управления автоматической переездной сигнализацией обеспечивает по сравнению с существующими следующие технико-экономические преимущества:
- обеспечивается контроль точности вычисления текущей координаты поезда в каждый раз в момент его вступления на участок приближения за счет верификации вычисленной координаты с фактической;
- обеспечивается точность определения координаты поезда посредством корректировки коэффициентов уравнения вычисления координат поезда в случае появления ошибки вычисления текущей координаты поезда;
- минимизируется время закрытого состояния переезда от скорости поезда на участке приближения за счет непрерывного измерения скорости и координаты поезда;
- сокращается расход электроэнергии за счет небольшого времени включенного состояния ограждающих устройств переезда;
- повышается безопасность движения поездов благодаря незначительному времени простоя автотранспорта перед закрытым переездом и точного определения фактической координаты закрытия переезда для автотранспорта;
- улучшается экологическая обстановка в зоне переездов из-за малого времени простоя автотранспорта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ | 2005 |
|
RU2281219C1 |
| Устройство управления автоматической переездной сигнализацией | 2016 |
|
RU2651379C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СИСТЕМОЙ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИИ | 2019 |
|
RU2732685C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ НА ЖЕЛЕЗНОДОРОЖНОМ ПЕРЕЕЗДЕ | 2018 |
|
RU2681451C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИИ | 2000 |
|
RU2169678C1 |
| Устройство для управления автоматической переездной сигнализацией | 1977 |
|
SU709444A1 |
| СИСТЕМА ЗАКРЫТИЯ ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА | 2016 |
|
RU2632544C2 |
| СПОСОБ УПРАВЛЕНИЯ ЗАКРЫТИЕМ ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА | 2015 |
|
RU2610903C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ | 2013 |
|
RU2544285C1 |
| СИСТЕМА УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2756140C1 |
Изобретение относится к области железнодорожной автоматики для управления переездной сигнализацией. В способе в рельсовую линию на питающем конце непрерывно подают сигнал переменного тока и на том же конце непрерывно измеряют амплитуду напряжения и тока при различных значениях координаты расположения поездного шунта от релейного до питающего конца рельсовой линии и формируют множество измеренных значений напряжения, тока и соответствующих им координат поезда, с помощью которых составляется система уравнений. Определяют коэффициенты уравнения координаты поезда и измеряя текущее значение напряжения и тока, определяют текущую координату поезда на участке приближения, определяют скорость поезда на участке и с учетом возможного его ускорения определяют фактическую координату закрытия переезда. Причем в момент вступления поезда на участок приближения сравнивают текущую координату поезда, определенную уравнением, с длиной участка приближения, при неравенстве их значений корректируют коэффициенты уравнения координаты поезда, а при равенстве значений - определяют скорость поезда и фактическую координату закрытия переезда. Достигается повышение безопасности движения. 2 ил.
Способ управления автоматической переездной сигнализацией, заключающийся в том, что в рельсовую линию на питающем конце непрерывно подают сигнал переменного тока и на том же конце непрерывно измеряют амплитуду напряжения и тока при различных значениях координаты расположения поездного шунта от релейного до питающего конца рельсовой линии и формируют множество измеренных значений напряжения U1, тока I1 и соответствующих им координат поезда xn, с помощью которых составляется система уравнений координаты расположения поезда, правую часть приравнивают к значениям координат поезда xn и, решая систему

где Xni - координаты расположения поезда, при которых измерены U1ij и C1ij; определяют коэффициенты Cn уравнения координаты поезда, и измеряя текущее значение напряжения и тока, определяют текущую координату поезда на участке приближения

а скорость поезда на участке определяют по формуле
где Xni - текущая координата поезда,
Xn(i-1) - предыдущая координата, пройденная поездом за время Δt, и с учетом возможного его ускорения определяют фактическую координату закрытия переезда по формуле:

где lyn - длина участка приближения к переезду,
 - табличное значение времени, необходимое для закрытия переезда,
- табличное значение времени, необходимое для закрытия переезда,
ai - ускорение движения поезда на участке приближения, вычисляемое по кривой скорости поезда,
отличающийся тем, что в момент вступления поезда на участок приближения сравнивают текущую координату поезда xп, определенную уравнением, с длиной участка приближения, при неравенстве их значений корректируют коэффициенты Cn уравнения координаты поезда, а при равенстве значений определяют скорость поезда и фактическую координату закрытия переезда.
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ | 2005 |
|
RU2281219C1 |
| Устройство для автоматического ограждения переезда | 1986 |
|
SU1342796A1 |
| Устройство для автоматического ограждения переезда | 1986 |
|
SU1342796A1 |
| ЦИФРОВАЯ ЖЕЛЕЗНОДОРОЖНАЯ СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ ПОЕЗДОВ, ПРИБЛИЖАЮЩИХСЯ К ПЕРЕЕЗДУ | 2004 |
|
RU2342274C2 |
| US 2011095139 A1, 28.04.2011. | |||

