////// /ffl//////////// т /// //////////// т т ///
13-15, установленных на платформах 1, 4, 5, дополнительных кронштейнов 10, установленных на нижних плоскостях подвижных платформ. Грузоподъемное устройство содержит лебедку 16, канаты 17, намотанные одними концами на ее барабан, канаты 18, огибающие блоки соответственно и закрепленные одним концом на неподвижной платформе 1 , а другим - на конце дополнительного кронштейна 12, канаты 19 - на подвижной платформе 4, Пои вращении барабана канат 17 поднимает платформу 4 вместе с блоками 15. Канаты 18, действуя на дополнительный кронштейн 12 платформы 5, поднимают рабочую платформу. Опускаются платформы под действием собственного веса при сматывании канатов 17 с барабана. 3 ил.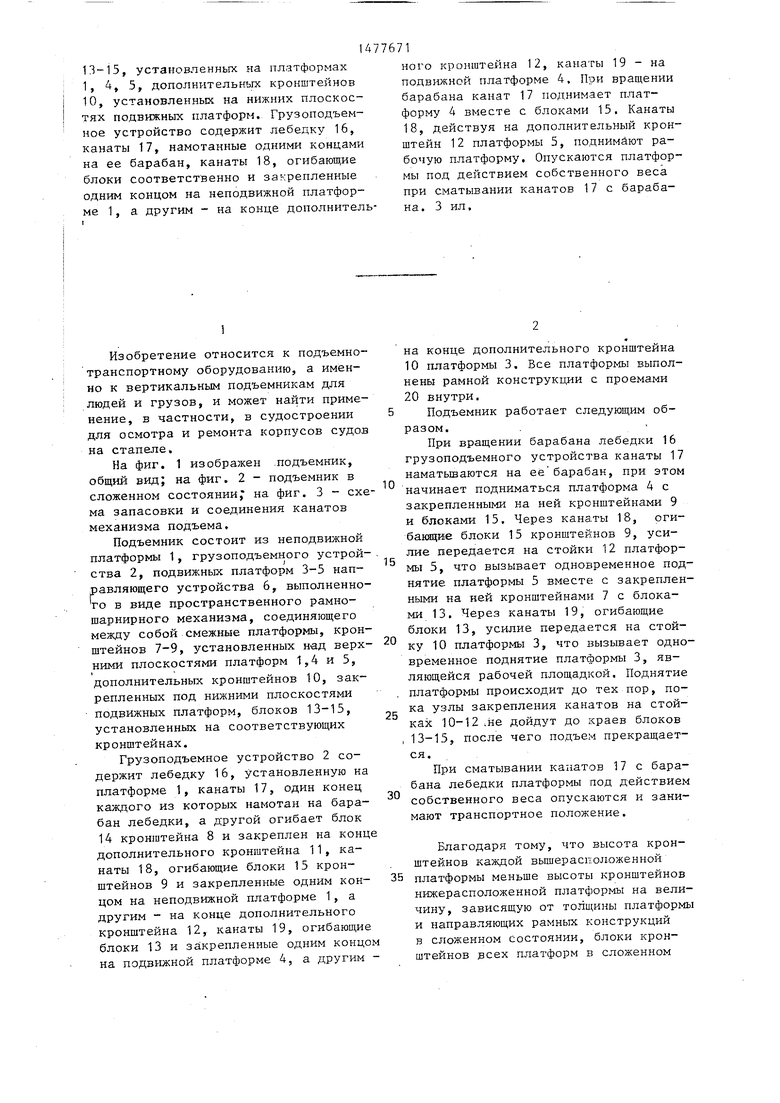
| название | год | авторы | номер документа |
|---|---|---|---|
| Строительный подъемник | 1985 |
|
SU1303534A1 |
| Строительный подъемник | 1980 |
|
SU945042A1 |
| Бадьевый подъемник | 1974 |
|
SU540796A1 |
| МАЧТОВЫЙ ПОДЪЕМНИК | 1972 |
|
SU335197A1 |
| Подъемник | 1988 |
|
SU1567495A1 |
| Строительный подъемник | 1982 |
|
SU1104088A1 |
| СПОСОБ СБОРКИ, РАЗБОРКИ И ТРАНСПОРТИРОВКИ МОБИЛЬНОГО ПОДЪЕМНОГО КРАНА | 2010 |
|
RU2542828C2 |
| УСТРОЙСТВО для УРАВНОВЕШИВАНИЯ СТРЕЛОВЫХ КРАНОВ | 1973 |
|
SU385889A1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО | 2000 |
|
RU2193517C2 |
| Грузоподъемное устройство | 1980 |
|
SU931644A1 |
Изобретение относится к подъемно-транспортному оборудованию. Цель изобретения - улучшение эксплуатационных качеств за счет сокращения габарита в сложенном состоянии при сохранении максимальной высоты подъема. Подъемник состоит из неподвижной платформы 1, грузоподъемного устройства 2, подвижных платформ 3-5, направляющего рамно-шарнирного механизма 6, кронштейнов 7-9 с блоками 13-15, установленных на платформах 1,4,5, дополнительных кронштейнов 10, установленных на нижних плоскостях подвижных платформ. Грузоподъемное устройство содержит лебедку 19, канаты 17, намотанные одними концами на ее барабан, канаты 18, огибающие блоки и закрепленные одним концом на неподвижной платформе 1, другим - на конце дополнительного кронштейна 12, канаты 19 - на подвижной платформе 4. При вращении барабана канат 17 поднимает платформу 4 вместе с блоками 15. Канаты 18, действуя на дополнительный кронштейн 12 платформы 5, действуя на дополнительные кронштейны, поднимают рабочую платформу. Опускаются платформы под действием собственного веса при сматывании канатов 17 с барабана. 3 ил.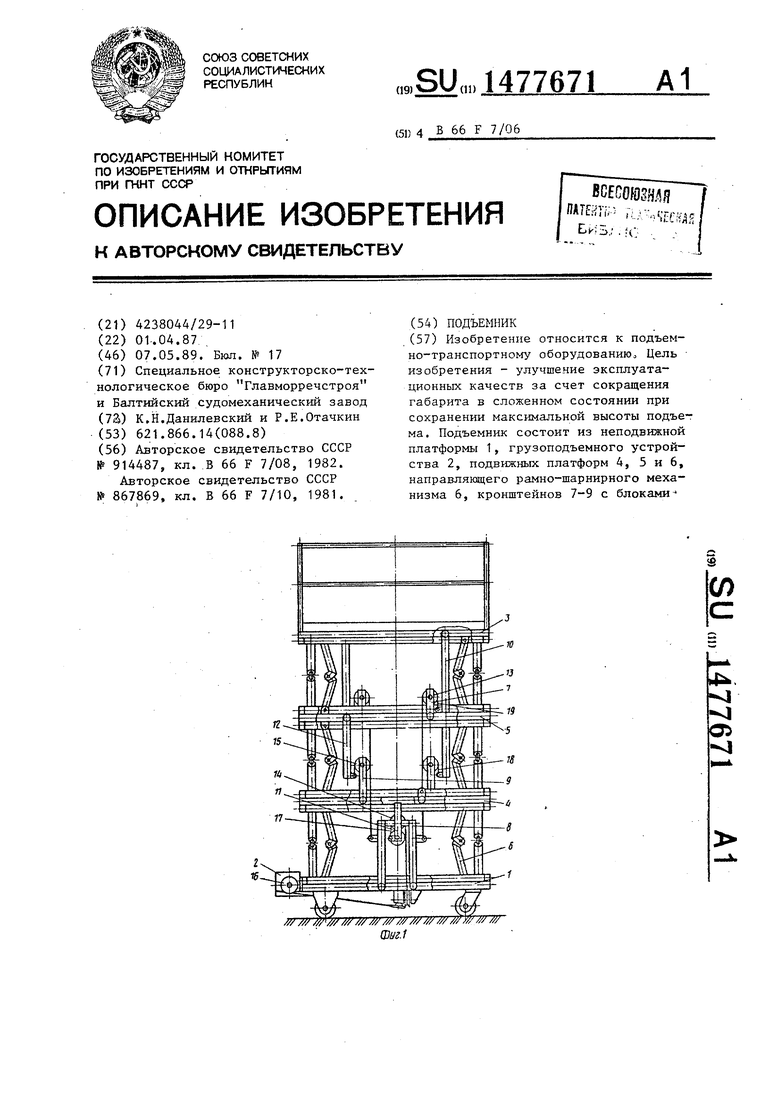
1
Изобретение относится к подъемно- транспортному оборудованию, а именно к вертикальным подъемникам для людей и грузов, и может найти применение, в частности, в судостроении для осмотра и ремонта корпусов судов на стапеле.
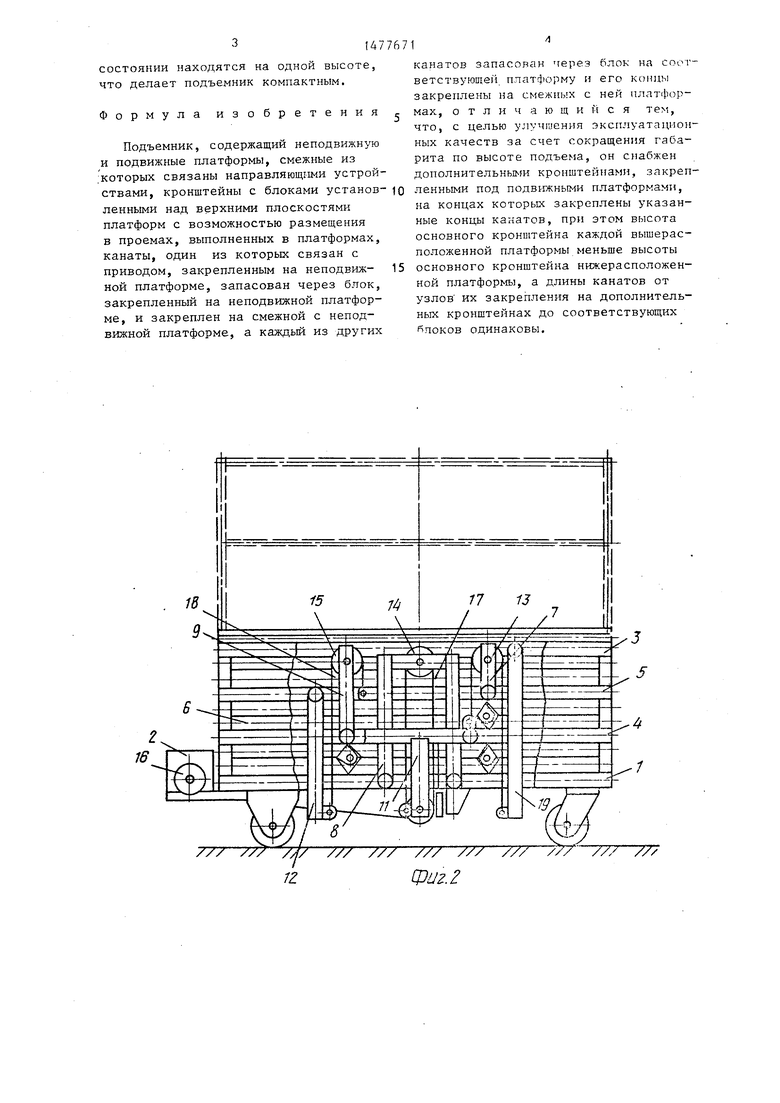
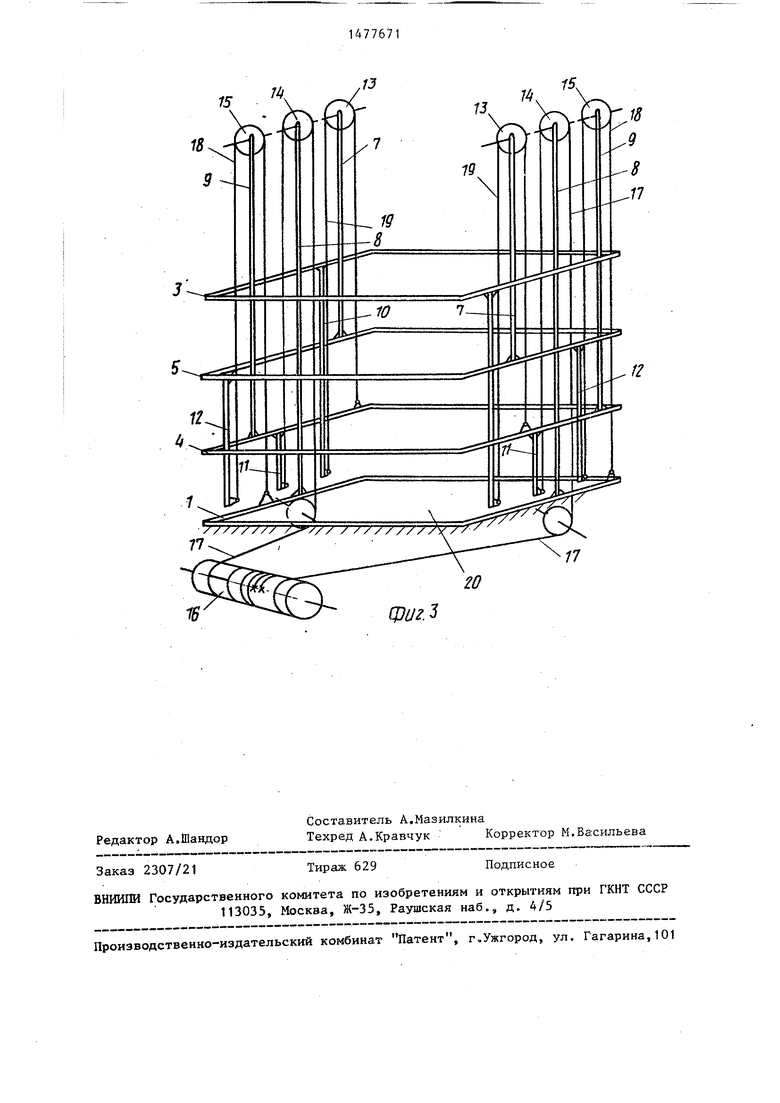
На фиг. 1 изображен подъемник, общий вид; на фиг. 2 - подъемник в сложенном состоянии; на фиг. 3 - схема запасовки и соединения канатов механизма подъема.
Подъемник состоит из неподвижной платформы 1, грузоподъемного устройства 2, подвижных платформ 3-5 направляющего устройства 6, выполненного в виде пространственного рамно- шарнирного механизма, соединяющего между собой смежные платформы, кронштейнов 7-9, установленных над верхними плоскостями платформ 1,4 и 5, дополнительных кронштейнов 10, закрепленных под нижними плоскостями подвижных платформ, блоков 13-15, установленных на соответствующих кронштейнах.
Грузоподъемное устройство 2 содержит лебедку 16, установленную на платформе 1, канаты 17, один конец каждого из которых намотан на барабан лебедки, а другой огибает блок 14 кронштейна 8 и закреплен на конце дополнительного кронштейна 11, канаты 18, огибающие блоки 15 кронштейнов 9 и закрепленные одним концом на неподвижной платформе 1, а другим - на конце дополнительного кронштейна 12, канаты 19, огибающие блоки 13 и закрепленные одним концом на подвижной платформе 4, а другим 5
на конце дополнительного кронштейна 10 платформы 3. Все платформы выполнены рамной конструкции с проемами 20 внутри.
5 Подъемник работает следующим образом.
При вращении барабана лебедки 16 грузоподъемного устройства канаты 17 наматываются на ее барабан, при этом начинает подниматься платформа 4 с закрепленными на ней кронштейнами 9 и блоками 15. Через канаты 18, огибающие блоки 15 кронштейнов 9, усилие передается на стойки 12 платформы 5, что вызывает одновременное поднятие платформы 5 вместе с закрепленными на ней кронштейнами 7 с блоками 13. Через канаты 19, огибающие блоки 13, усилие передается на стойку 10 платформы 3, что вызывает одновременное поднятие платформы 3, являющейся рабочей площадкой. Поднятие платформы происходит до тех пор, пока узлы закрепления канатов на стойках 10-12.не дойдут до краев блоков ,13-15, после чего подъем прекращается.
При сматывании канатов 17 с барабана лебедки платформы под действием
Г)
собственного веса опускаются и занимают транспортное положение.
Благодаря тому, что высота кронштейнов каждой вышерасгсложенной 5 платформы меньше высоты кронштейнов нижерасположенной платформы на величину, зависящую от толщины платформы и направляющих рамных конструкций в сложенном состоянии, блоки кронштейнов всех платформ в сложенном
5
состоянии находятся на одной высоте, что делает подъемник компактным.
Формула изобретения
Подъемник, содержащий неподвижную и подвижные платформы, смежные из которых связаны направляющими устройствами, кронштейны с блоками установ- ленными над верхними плоскостями платформ с возможностью размещения в проемах, выполненных в платформах, канаты, один из которых связан с
приводом, закрепленным на неподвижной платформе, запасован через блок, закрепленный на неподвижной платформе, и закреплен на смежной с неподвижной платформе, а каждый из других
5
канатов запасован череч блок на соответствующей татформу и его концы закреплены на смежных с ней платформах, отличающийся тем, что, с целью ул чгаения эксплуатационных качеств за счет сокращения габарита по высоте подъема, он снабжен дополнительными кронштейнами, закрепленными под подвижными платформами, на концах которых закреплены указанные концы канатов, при этом высота основного кронштейна каждой вышерасположенной платформы меньше высоты основного кронштейна нижерасположенной платформы, а длины канатов от узлов их закрепления на дополнительных кронштейнах до соответствующих чоков одинаковы.
18
П
сриг.3
| Авторское свидетельство СССР № 914487, кл | |||
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Телескопический подъемник | 1978 |
|
SU867869A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
