барабаны 15,17 лебедки с канатами 14 и устройство, имитирующее обрыв каната перемещения каретки, взаимодействующее с упором, УстройствО| имитирующее обрыв каната перемещения каретки, содержит установленный шарнир- но на раме двуплечий рычаг 20, одно ллечо которого оборудовано блоком 21, а другое - подпружиненной защелкой 23, взаимодействующей с упором 40, причем грузовой канат 41 запасо- ван на блоках, смонтированных на концах монорельса 7, и закреплен на ба1
Изобретение относится к грузоподъемным машинам, а именно к строи- тельньм подъемникам, предназначенным для подачи грузов в оконные монтажные проемы зданий.
Цель изобретения - расширение, эксплуатационных возможностей и повышение производительности труда.
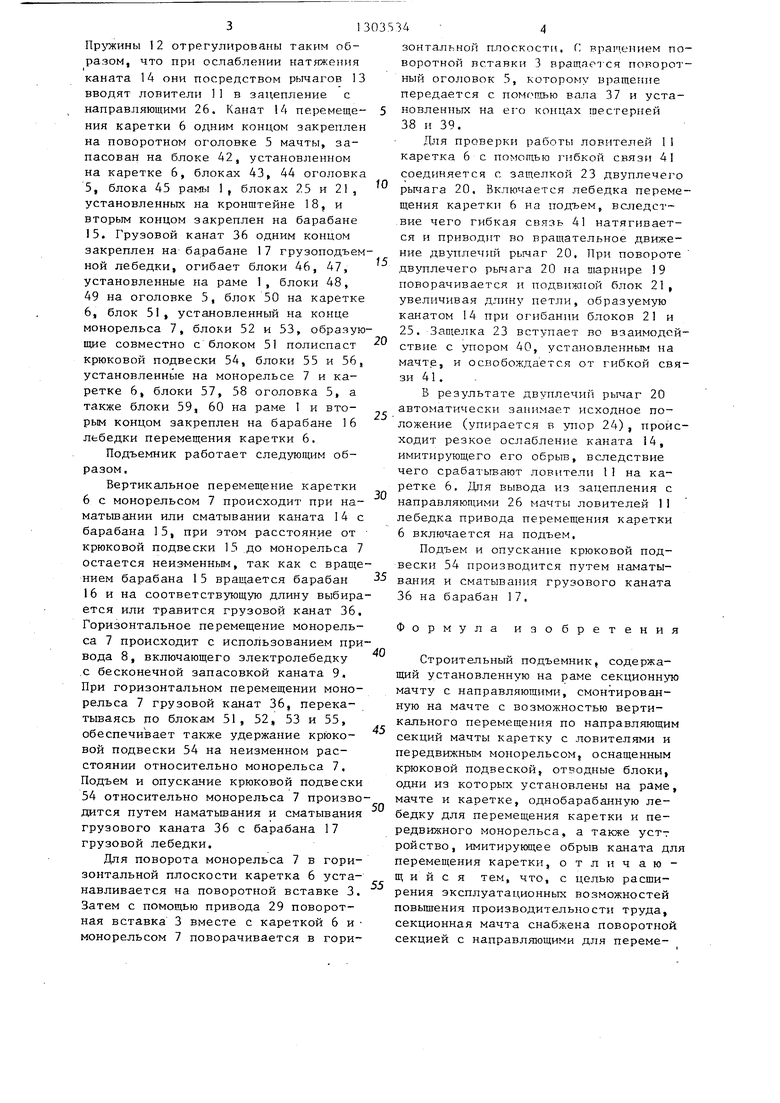
На фиго изображен строительный подъемник, общий вид; на. фиг, 2 - схема запасовки каната перемещения каретки и грузоподъемного каната; на фиг.З - узел I на фиг,1} на фиг, 4 - то же, в момент освобождения гибкой
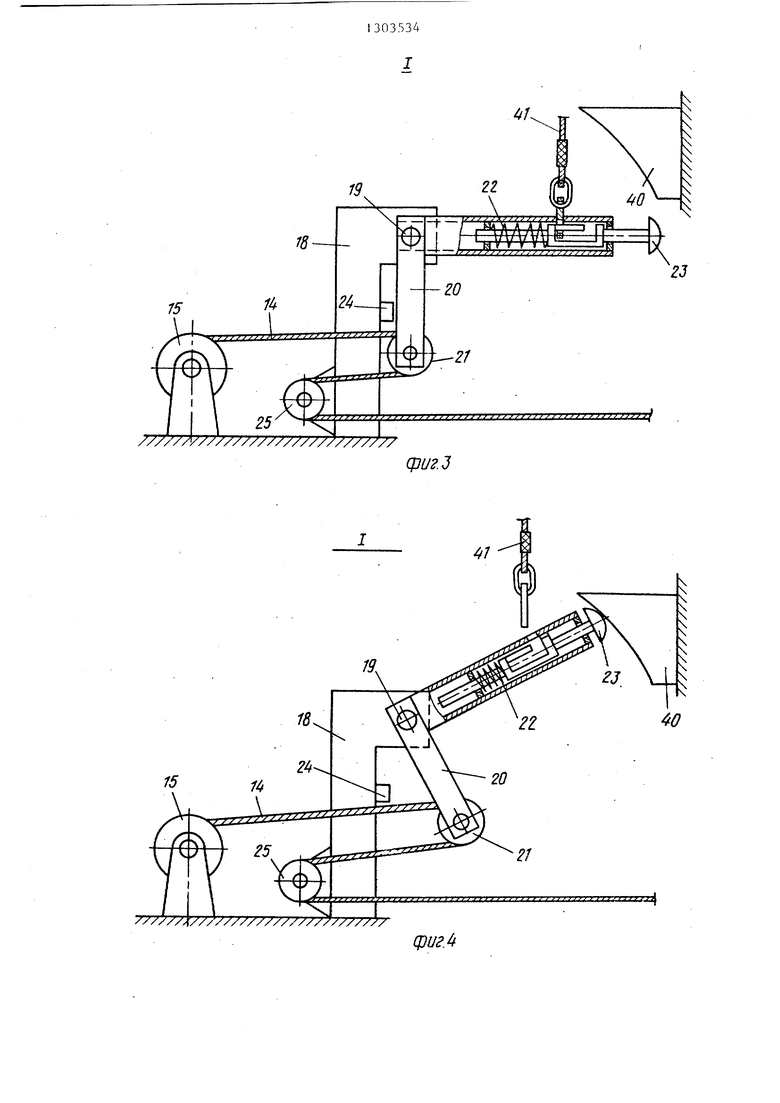
связиj на фиг, 5 - вид А на фиг,I, Строительный подъемник содержит раму 1, несущую мачту,.состоящую из нижней секции 2, поворотной секции 3 верхней секции 4, поворотного оголовка 5, На мачте смонтирована вертикаль но перемещающаяся каретка 6, оборудованная выдвижным монорельсом 7 и приводом 8 вьщвижения монорельса 7, например электролебедка с бесконечной запасовкой каната 9, Монорельс 7 закреплен в каретке 6 посредством катков 10, На каретке 6 установлены ловители 11, кинематически связанные через подпружиненные пружинами 12 рычаги 13 с канатом 14 перемещения каретки 6. Рама 1 оборудована лебедкой перемещения каретки 6, снабженной двумя барабанами 15 и 16, жестко зак- репленньми на одном валу, грузовой лебедкой с барабаном 17 и кронштейном 18, На кронштейне 18 с помощью шарнира 19 закреплен двуплечий рычаг
рабане, установленном на валу лебедки, а канат 14 перемещения каретки 6 огибает блок 21, смонтированный на двуплечем рычаге. При включении лебедки перемещения каретки 6 1 ибкая связь 41 натягивается, поворачивая при этом двуплечий рычаг 20, защелка которого вступает во взаимодействие с упором 40, освобождаясь от связи 41, В результате этого происходит резкое ослабление каната 14, имитирующее его обрыв, вследствие чего срабатывают ловители. 5 ил.
5
5
0
5
20, на одном конце которого закреплен подвижной блок 21, а на другом - подпружиненная пружиной 22 защелка 23, Кроме того, на кронштейне 18 установлен упор 24 для двуплечего рычага 20 и блок 25.
Секции 2,4 и поворотная секция 3 оборудованы направляющими 26, на которых посредством катков 27 смонтирована каретка.6. На поворотной вставке 3 направляющие 26 установлены на консолях 28. Такое конструктивное решение позволяет передавать вращательное движение от привода 29, установленного на секции 2, посредством вала 30 с шестерней 31 поворотной, секции 3, оборудованной двумя круговыми зубчатыми рейками 32, 33. Поворотный оголовок 5 снабжен круговой зубчатой рейкой 34 и смонтирован с возможностью поворота в горизонтальной плоскости на гильзе 35, через которую пропущен канат 14 и грузовой канат 36. Передача вращения от поворотной секции 3 поворотному оголовку 5 осуществляется посредством вала 37 с установленными на его концах шестернями 38 и 39. Такое конструктивное решение обеспечивает поворот оголовка 5 совместно с секцией 3 на один и тот же угол. На секции 2 установлен упор 40, взаимодей- ствую1ций с защелкой 23 при повороте рычага 20,
Для испытания ловителей 11 каретка 6 соединяется посредством гибкой связи 41 с защелкой 23 рычага 20.
Пр жины 12 отрегулированы таким образом, что при ослаблении натяжения каната 14 они посредством рычагов 13 вводят ловители 11 в зацепление с направляющими 26. Канат 14 перемещения каретки 6 одним концом закреплен на поворотном оголовке 5 мачты, за- пасован на блоке 42, установленном на каретке 6, блоках 43, 44 оголовка
5,блока 45 рамы 1, блоках 25 и 21 , установленных на кронштейне 18, и вторым концом закреплен на барабане 15. Грузовой канат 36 одним концом закреплен на барабане 17 грузоподъемной лебедки, огибает блоки 46, 47, установленные на раме 1, блоки 48,
49 на оголовке 5, блок 50 на каретке
6,блок 51, установленный на конце монорельса 7, блоки 52 и 53, образующие совместно с блоком 51 полиспаст крюковой подвески 54, блоки 55 и 56, установленные на монорельсе 7 и каретке 6, блоки 57, 58 оголовка 5, а также блоки 59, 60 на раме 1 и вторым концом закреплен на барабане 16 лебедки перемещения каретки 6.
Подъемник работает следующим образом.
Вертикальное перемещение каретки 6 с монорельсом 7 происходит при наматывании или сматывании каната 14 с барабана 15, при этом расстояние от крюковой подвески 15 до монорельса 7 остается неизменным, так как с вращением барабана 1 5 вращается барабан 16 и на соответствующую длину выбирается или травится грузовой канат 36. Горизонтальное перемещение монорельса 7 происходит с использованием привода 8, включающего электролебедку с бесконечной запасовкой каната 9. При горизонтальном перемещении монорельса 7 грузовой канат 36, перекатываясь по блокам 51, 52, 53 и 55, обеспечивает также удержание крюковой подвески 54 на неизменном расстоянии относительно монорельса 7. Подъем и опускание крюковой подвески 54 относительно монорельса 7 производится путем наматывания и сматывания грузового каната 36 с барабана 17 грузовой лебедки.
Для поворота монорельса 7 в горизонтальной плоскости каретка 6 устанавливается на поворотной вставке 3. Затем с помощью привода 29 поворотная вставка 3 вместе с кареткой 6 и монорельсом 7 поворачивается в гори
fO
f5
20
25
З-03534 4
зонтальной плоскости, Г. врагтением поворотной вставки 3 вращается поворотный оголовок 5, которому вращение передается с помощью вала 37 и установленных на его концах шестерней 38 и 39.
Для проверки работы ловителей 1i каретка 6 с помощью гибкой связи 4 соединяется с защелкой 23 двуплечего рычага 20, Включается лебедка перемещения каретки 6 на подъем, вследствие чего гибкая связь 41 натягивается и приводит во вращательное движение двуттлечий рычаг 20, При повороте дв ттлечего рычага 20 на шарнире 19 поворачивается и подвижной блок 21, увеличивая длину петли, образуемую канатом 14 при огибании блоков 2 и 25, Защелка 23 вступает во взаимодействие с упором 40, установленным на мачте, и освобождается от гибкой связи 4 1 .
Б результате двуплечий рычаг 20 автоматически занимает исходное положение (упирается в упор 24), происходит резкое ослабление каната 14, имитирующего его обрыв, вследствие чего срабатывают ловители 11 на каретке 6, Для вывода vi3 зацепления с направляющими 26 мачты ловителей 1 лебедка привода перемещения каретки 6 включается на подъем,
Подъем и опускание крюковой подвески 54 производится путем наматывания и сматывания грузового каната 36 на барабан 17,
30
Формула изобретения
Строительный подъемник, содержащий установленную на раме секционную мачту с направляющими, смонтированную на мачте с возможностью вертикального перемещения по направляющим секций мачты каретку с ловителями и передвижным монорельсом, оснащенным крюковой подвеской, отводные блоки, одни из которых установлены на раме, мачте и каретке, однобарабанную лебедку для перемещения каретки и передвижного монорельса, а также устт ройство, имитирующее обрыв каната для перемещения каретки, отличающийся тем, что, с целью расширения эксплуатационных возможностей повьпиения производитель}1ости труда, секционная мачта снабжена поворотной секцией с направляющими для перемещения каретки, установленными на консолях этой секции, и грузовой лебедкой, на барабане которой намотан одним концом грузовой канат, а устройство, имитирующее обрыв каната для перемещения каретки, включает в себя кронштейн, расположенный на раме подъемника, двуплечий рычаг, установленный на указанном кронштейне, упор, смонтированный на одной из секций мачты, блок, закрепленный на одном конце двуплечего рьгаага, и подпружиненную защелку, смонтированную на
другом плече этого рычага и взаимодействующую с указанным упором, при этом грузовой канат запасован через все упомянутые отводные блоки, другие из которых установлены на концах монорельса, причем лебедка для перемещения каретки выполнена двухбара- банной, а другой .конец грузового каната закреплен на одном из барабанов лебедки перемещения каретки, при этом канат лебедки для перемещения каретки запасован через упомянутый блок двуплечего рычага.
| название | год | авторы | номер документа |
|---|---|---|---|
| Строительный подъемник | 1982 |
|
SU1104088A1 |
| Строительный подъемник | 1986 |
|
SU1386544A1 |
| Строительный подъемник | 1988 |
|
SU1602843A1 |
| Строительное грузоподъемное устройство | 1984 |
|
SU1312048A1 |
| Строительный подъемник | 1977 |
|
SU737337A1 |
| Строительный подъемник | 1984 |
|
SU1276609A1 |
| Кабельный кран | 1987 |
|
SU1532530A1 |
| Подъемник | 1990 |
|
SU1710477A1 |
| Строительный подъемник | 1987 |
|
SU1463682A1 |
| Мачтовый строительный подъемник | 1984 |
|
SU1191410A1 |

Изобретение относится к грузоподъемным машинам, в частности к строительным подъемникам для подачи грузов- в проемы зданий. Цель изобретения - расширение эксплуатационных возможностей и повышение производительности. Устройство содержит установленную на раме 1 секционную мачту с направляющими 26, каретку 6 с ловителями и вьщвижным монорельсом 7, оборудованным крюковой подвеской 54, 25 60 г{ 5347 фиг.} (Л со о со ел ОО 4 
57
55
49
77
ера г. 2
303534 I
15
фигд
15
фиг A
Редактор М.Циткина
Составитель В.Самсонов Техред Л, Олейник
Заказ 1270/25Тираж 721Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
Корректор А.Зимокосов
| Ремонтно-строительный подъемник | 1978 |
|
SU712359A2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
