&иг
Изобретение относится к подъемно-транспортному машиностроению, в частности к подъемникам, и может быть использовано при выполнении строительных, монтажных, отделочных и ремонтных работ.
Цель изобретения - расширение зоны обслуживания и уменьшение высоты при транспортировке.
На фиг. показан предлагаемый подъемник в транспортном положении, общий ви на фиг. 2 - то же, в рабочем положении; п.. фиг. 3 - схема запасовки каната в транс портное положение.
Подъемник содержит ходовую раму I с выносными опорами 2, на которой установлена поворотная платформа 3 с кронштейном 4. На кронштейне 4 на шарнире 5 закреплена своей средней частью корневая секция 6 телескопической мачты, имеющей промежуточную 7 и концевую 8 секции.
На верхней части корневой секции 6 закреплены направляющие 9, а на верхнем конце концевой секции 8 - направляющие 10. Кронштейн 4 выполнен с дополнительными направляющими 11, которые при вертикаль ном положении мачты являются продолжением ее направляющих 9 и 10. В дополнительных направляющих 11 установлена каретка 12 с многозвенчатой грузовой площадкой 13. В нижней части корневой секции 6 установлен дополнительный отклоняющий блок 14, на котором запасован тяговый канат 15. Один конец каната 15 закреплен на барабане лебедки 16, установленной на поворотной платформе 3. Другой конец каната 15 огибает установленные на секциях 6-8 телескопической мачты блоки 17 и закреплен на каретке 12. На каретке 12 жестко установлена выполненная в виде дуги шина 18, предназначенная для отклонения каната при транспортном положении телескопической мачты. На ходовой раме 1 закреплены вертикальные направляющие 19, которые совмещаются с направляющими 11 и служат их продолжением. В транспортном положении мачта занимает горизонтальное положение, канат 15 запасован на отклоняющий блок 14, каретка 12 установлена и зафиксирована на направляющих 11. Выносные опоры 2 находятся в сложенном состоянии н занимают крайнее, верхнее положение.
Подъемник работает следующим образом.
В рабочее положение устанавливают выносные опоры 2, при этом ходовая рама 1
занимает горизонтальное положение. При включении лебедки 16 канат 15 наматывается на барабан и, воздействуя на блок 14, поворачивает мачту на шарнире 5 кронштейна 4 и поднимает ее в рабочее положение. Ка- нат 15 сходит с блока 14. При рабочем положении мачты привод лебедки 16 отключается, мачта фиксируется на кронштейне 4, а каретка 12 расфиксируется.
При повторном включении лебедки 16 ка0 нат 15, запасованный на установленные на секциях 6-8 телескопической мачты и каретке 12 блоки 17, перемещает каретку 12 по направляющим 1 1, 9 и 10 до упора в концевую секцию 8. Каретка 12, подхватывая
5 концевую секцию 8, выдвигает ее. После полного выдвижения концевой секции начинает выдвигаться промежуточная секция 7.
Перемещение груза осуществляется подъемом каретки 12 и выдвижением сек- 0 ций 6-8 мачты, а в горизонтальной плоскости -- поворотом платформы и относительным поворотом звеньев площадки 13. При необходимости снижения погрузочной высоты поворотная платформа 3 поворачивается 5 таким образом, чтобы направляющие 11 и 19 совпали. При расположении каретки 12 на направляющих 19 механизм поворота пово- . ротной платформы включаться не должен.
Формула изобретения
Подъемник, содержащий ходовую раму с выносными опорами, установленную на ней телескопическую мачту с направляющими, закрепленными на корневой секции, грузовую площадку, перемещающуюся по направляющим, и канат, связывающий через систему блоков, установленных на секциях мачты, грузовую площадку с приводом, отличающийся тем что, с целью расширения зоны обслуживания и уменьшения высоты подъемника при транспортировке, он снабжен установленным на ходовой раме поворотным кронштейном, содержащим дополнительные направляющие, в которых консольно установлена грузовая площадка, горизонтальным шарниром, соединяющим верхнюю часть
кронштейна со средней частью корневой секции, и установленным в нижней части корневой секции дополнительным блоком, отклоняющим канат в транспортном и монтажном положении мачты.
Фиг. 2
3 Id
| название | год | авторы | номер документа |
|---|---|---|---|
| Подъемник | 1990 |
|
SU1770248A2 |
| Наклонный подъемник | 1986 |
|
SU1366470A1 |
| Подъемник | 1985 |
|
SU1331789A1 |
| Строительный подъемник | 1981 |
|
SU958290A1 |
| Строительный подъемник | 1979 |
|
SU854858A1 |
| Агрегат подъемный для ремонта скважин АПРС-32/40 | 2019 |
|
RU2712990C1 |
| Кран-манипулятор К.Б.Розина | 1986 |
|
SU1567506A1 |
| Строительный подъемник | 1977 |
|
SU737337A1 |
| Подъемник | 1989 |
|
SU1744061A1 |
| УСТРОЙСТВО ДЛЯ ВЕДЕНИЯ ПОЖАРОСПАСАТЕЛЬНЫХ РАБОТ НА ВЫСОТНЫХ ЗДАНИЯХ И СООРУЖЕНИЯХ | 2003 |
|
RU2263625C2 |
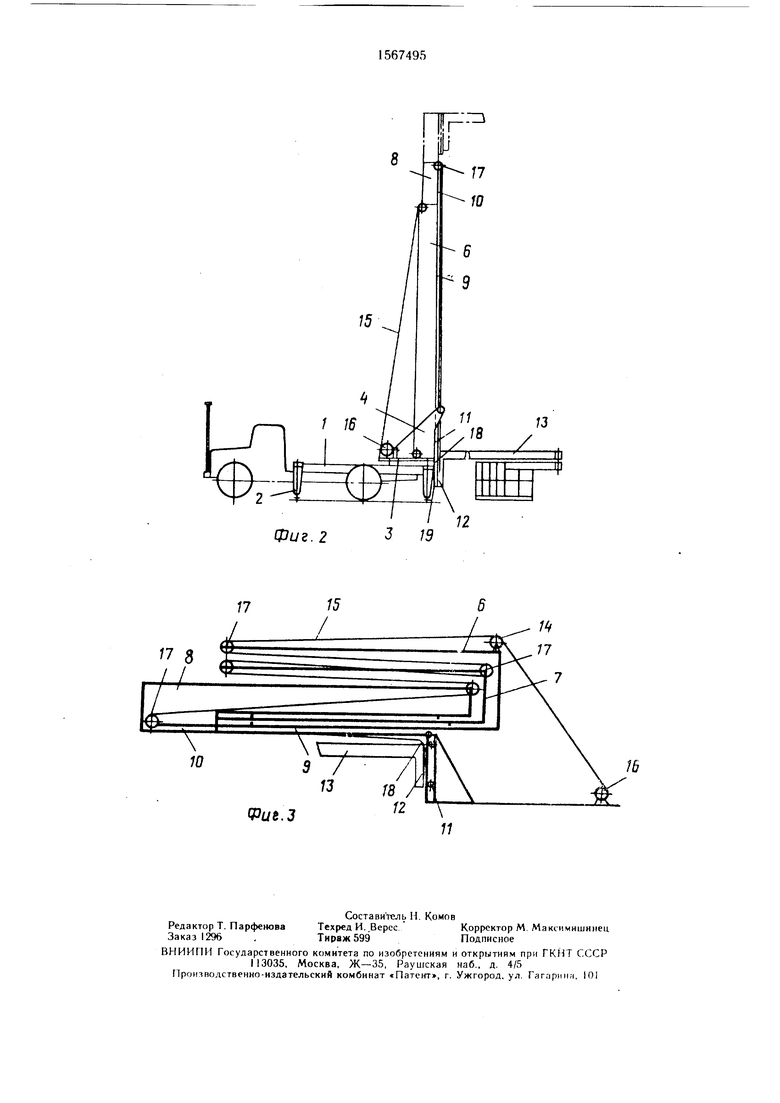
Изобретение относится к подъемно-транспортному машиностроению и может быть использовано при выполнении строительных, монтажных, отделочных и ремонтных работ. Цель изобретения - расширение зоны обслуживания и уменьшение высоты подъемника при транспортировке. Подъемник содержит ходовую раму 1, на которой устанолена поворотная платформа /ПП/ 3 с кронштейном /К/ 4. На кронштейне 4 шарнирно закреплена своей средней частью корневая секция /КС/ 6 телескопической мачты, выполненной с направляющими /Н/ 9 и 10. На К 4 выполнены дополнительные направляющие /ДН/ 11. В направляющих 11 установлена каретка /К/ 12 с площадкой 13. В нижней части КС 6 установлен дополнительный блок /ДБ/ 14, на котором запасован тяговый канат /ТК/ 15. Один конец ТК 15 закреплен на лебедке /Л/ 16, другой конец ТК 15 огибает установленные на секциях мачты блоки /Б/ 17 и закреплен на К 12. При включении Л 16 ТК 15 наматывается на барабан и, воздействуя на ДБ 14, поворачивает мачту на шарнире /Ш/ 5 и поднимает ее в рабочее положение, ТК 15 сходит с ДБ 14. При повторном включении Л 16 ТК 15 перемещает К 12 по Н 9, 10 и ДН 11 до упора в концевую секцию 8, К 12 подхватывает секцию 8 и выдвигает ее. Перемещение груза осуществляется подъемом К 12 и выдвижением секций мачты. 3 ил.
Фиь.З
| Подъемник | 1985 |
|
SU1331789A1 |
