Известны демпфированные манипуляторы со сферическим подвижным соединением для передачи движения захвату.
Отличительная особенность описываемого демпфированного манипулятора состоит в том, что в сферическом сочленении применены гидравлические полости с поршнем, снабженным калиброванными перепускными отверстиями для перепуска жидкости с одной стороны поршня на другую. Манипулятор такой конструкции устраняет резкие движения при. круговых и возвратно-поступательных перемешениях захвата.
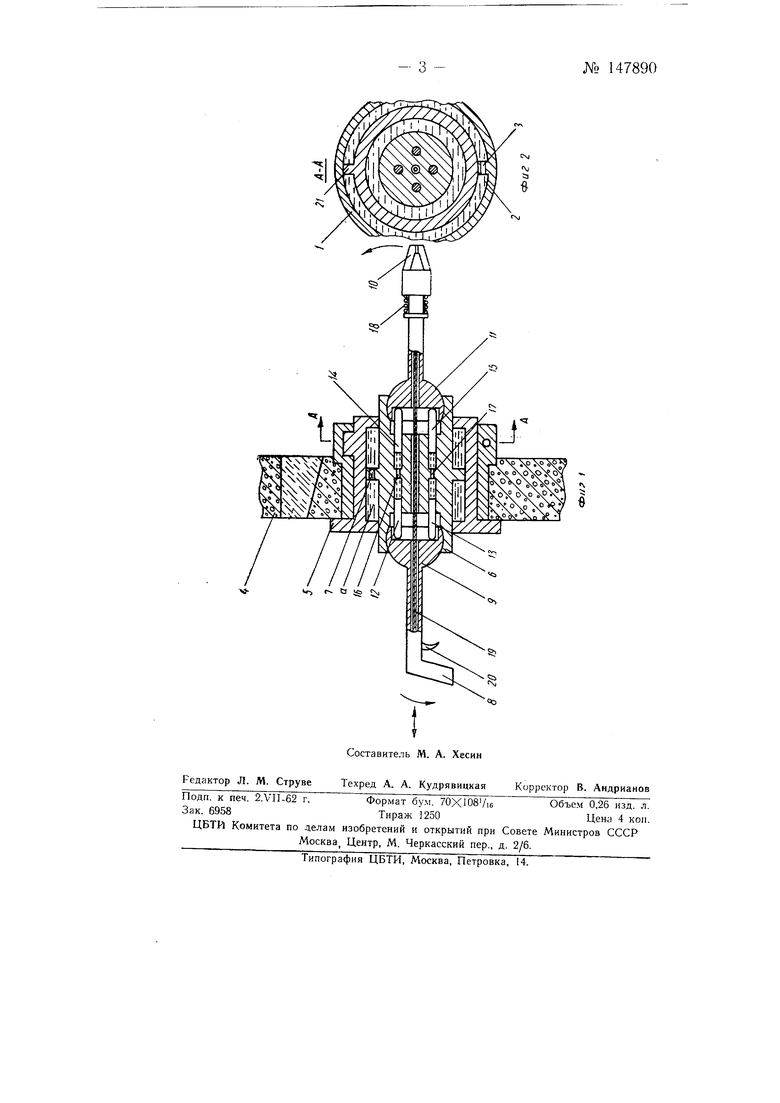
На фиг. 1 схематически изображен описываемый манипулятор, вид сбоку; на фиг. 2 - разрез по А-А на фиг. 1.
Кольцевой цилиндр /, имеющий неподвижную стенку 2 с калиброванным отверстием 3, заделан в стенку 4. Внутри кольцевого цилиндра вращается корпус 5. Во внутренней полости корпуса, заполненной жидкостью а, возвратно-поступательно перемещается поршень 6, имеющий калиброванные отверстия 7. В порнгень вмонтирована ручка iS со сферическим концом 9, а также захват 10 со сферическим концом 11, которые могут совершать вращательные движения. Кроме того, с обеих сторон порщня расположены плунжеры 12, 13, 14 и 15, передающие движение от сферической части ручки сферической части захвата. Цилиндры соответствующих плунжеров разделяются между собой калиброванными отверстиями 16 и 17 (каналами). Пружина 18 удерживает захват в замкнутом положении. Раскрытие захвата осуществляется тросом 19, сочлененным с крючком 20.
При движении ручки плунжеры поворачивают в соответствующую сторону захват. При возвратно-поступательном перемещении захвата ручкой жидкость перетекает из одной полости поршня в другую. Вра№ 147890 2 щательное движение захвата осуществляется в результате перемещения порщня 21 (лопаток) корпуса манипулятора по кольцевому цилиндру /. При этом жидкость перетекает через калиброванные отверстия в стенке 2.
Наличие во всех степенях движения калиброванных каналов позволяет оперировать манипулятором с определенной скоростью без резких перемещений.
Предмет изобретения
Демпфированный манипулятор со сферическим подвижным сочленением для передачи движения захвату, отличающийся тем, что, с целью устранения резких движений при круговых и возвратно-поступательных перемещениях захвата, в сферическом сочленении применены гидравлические полости с порщнем, снабженным калиброванными перепускными отверстиями для перетока жидкости с одной стороны поршня на другую.

| название | год | авторы | номер документа |
|---|---|---|---|
| Передняя телескопическая подвеска мототранспортного средства | 1981 |
|
SU1022857A1 |
| Гидравлический амортизатор | 1985 |
|
SU1293398A1 |
| Гидравлический пресс | 1981 |
|
SU1031762A1 |
| Испытатель пластов | 1980 |
|
SU1139837A1 |
| ТЕЛЕСКОПИЧЕСКИЙ ГИДРАВЛИЧЕСКИЙ АМОРТИЗАТОР ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2102256C1 |
| Электрогидравлический костыледер | 1961 |
|
SU147210A1 |
| Машина для чеканки хлопчатника | 1952 |
|
SU108610A1 |
| Клапанное устройство гидравлической системы автоматического управления коробкой передач транспортного средства | 1976 |
|
SU959615A3 |
| Страховочное устройство | 1985 |
|
SU1258459A1 |
| АМОРТИЗАТОР С ДИФФЕРЕНЦИРОВАННЫМ УСИЛИЕМ СЖАТИЯ | 1996 |
|
RU2093370C1 |