(21)4130513/ДС-1I
(22)04.08.86
(46) 23.05.89. Бюл. № 19 (72) Б.О.Тушинцев
(53)629.12 532.5.036.8.001.54(088.8)
(56)Авторское свидетельство СССР № 874472, кл. В 63 Н 1/36,
В 63 Н 23/24, 1976.
(54)ГРЕБНАЯ УСТАНОВКА
(57)Изобретение относится к судостроению, а именно к судовым движителям с колебательным рабочим органом, выполненным в виде плавника. Цель изобретения - повышение КПД гребной установки. Привод колебаний
гребкой устаговки размещен внутри герметичной армированной оболочки и выполнен в виде электромагнитов 30- 47, установленных в корпусах 19-27 и получающих питание по электрическому кабелю 18. Дня жесткости движителя корпусы 19 и 22 соединены между собой тросами, натгление которр осуществляется шаговыми электродвигателями. На электромаг ьиты согласно определенной программе подается питание, что заставляет их или отталкиваться, или притягиваться друг к другу, сгибая движитель. Гребная установка снабжена устройством проворота вокруг своей продольной оси. 21 ил.
(С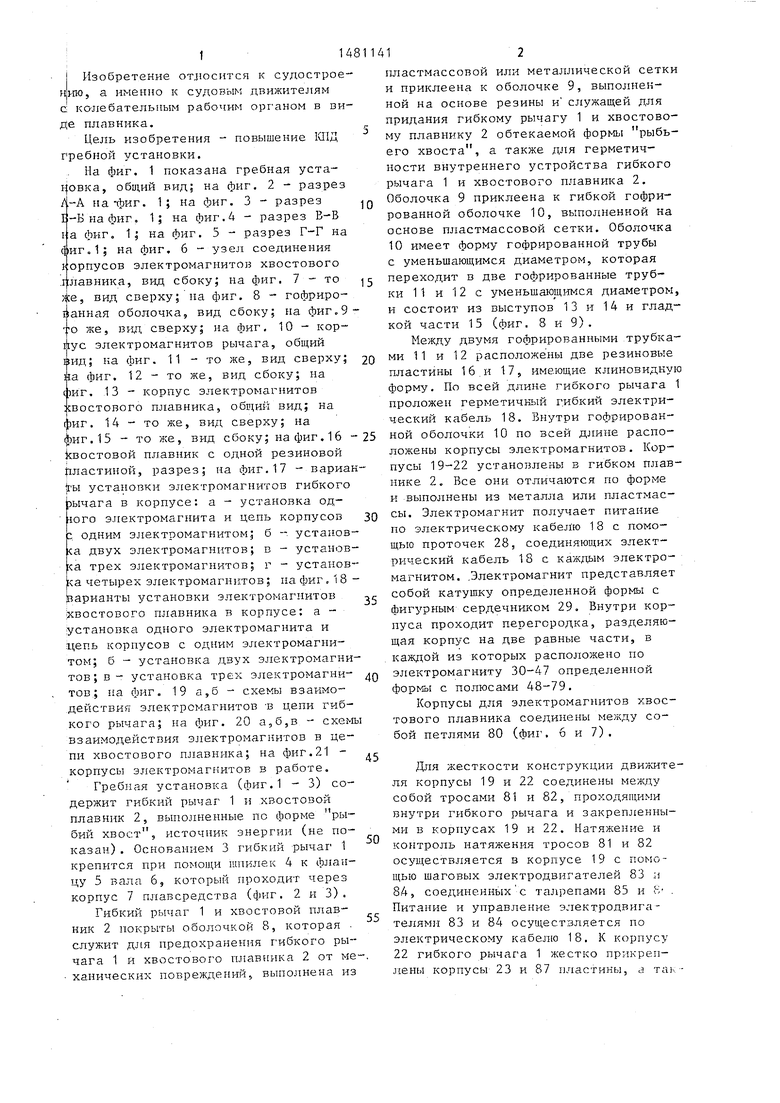

| название | год | авторы | номер документа |
|---|---|---|---|
| КОРАБЛЬ С ПЛАВНИКОВЫМ ДВИЖИТЕЛЕМ | 2007 |
|
RU2360831C2 |
| ПЛАВНИКОВЫЙ ЛОПАСТНОЙ ДВИЖИТЕЛЬ ДЛЯ ПЛАВСРЕДСТВ НАДВОДНОГО И ПОДВОДНОГО ПЛАВАНИЯ (ВАРИАНТЫ) | 2016 |
|
RU2622519C1 |
| ПРИВОД КРЫЛЬЕВ ПЛАВНИКОВОГО ДВИЖИТЕЛЯ | 2005 |
|
RU2287451C1 |
| ПРИСПОСОБЛЕНИЯ ДЛЯ ПОДВОДНОГО ПЛАВАНИЯ, СОДЕРЖАЩИЕ ПЛАВНИКОВЫЙ ДВИЖИТЕЛЬ, И ИХ БАЗОВЫЙ ЭЛЕМЕНТ - ОПОРА | 2013 |
|
RU2609187C1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| Плавниковый движитель | 1981 |
|
SU977272A1 |
| БЕСШУМНЫЙ ДВИЖИТЕЛЬ ПОДВОДНОГО СУДНА | 1999 |
|
RU2168442C2 |
| Гребная установка плавсредства | 1980 |
|
SU880881A1 |
| ПЛАВНИКОВОЕ ДВИЖИТЕЛЬНОЕ УСТРОЙСТВО | 2008 |
|
RU2482012C2 |
| СУДНО-КАТАМАРАН | 1992 |
|
RU2081779C1 |

Изобретение относится к судостроению, а именно к судовым движителям с колебательным рабочим органом, выполненным в виде плавника. Цель изобретения - повышение КПД гребной установки. Привод колебаний гребной установки размещен внутри герметичной армированной оболочки и выполнен в виде электромагнитов 30-47, установленных в корпусах 19-27 и получающих питание по электрическому кабелю 18. Для жесткости движителя корпуса 19 и 22 соединены между собой тросами, натяжение которых осуществляется шаговыми электродвигателями. На электромагниты согласно определенной программе подается питание, что заставляет их или отталкиваться, или притягиваться друг к другу, сгибая движитель. Гребная установка снабжена устройством проворота вокруг своей продольной оси. 21 ил.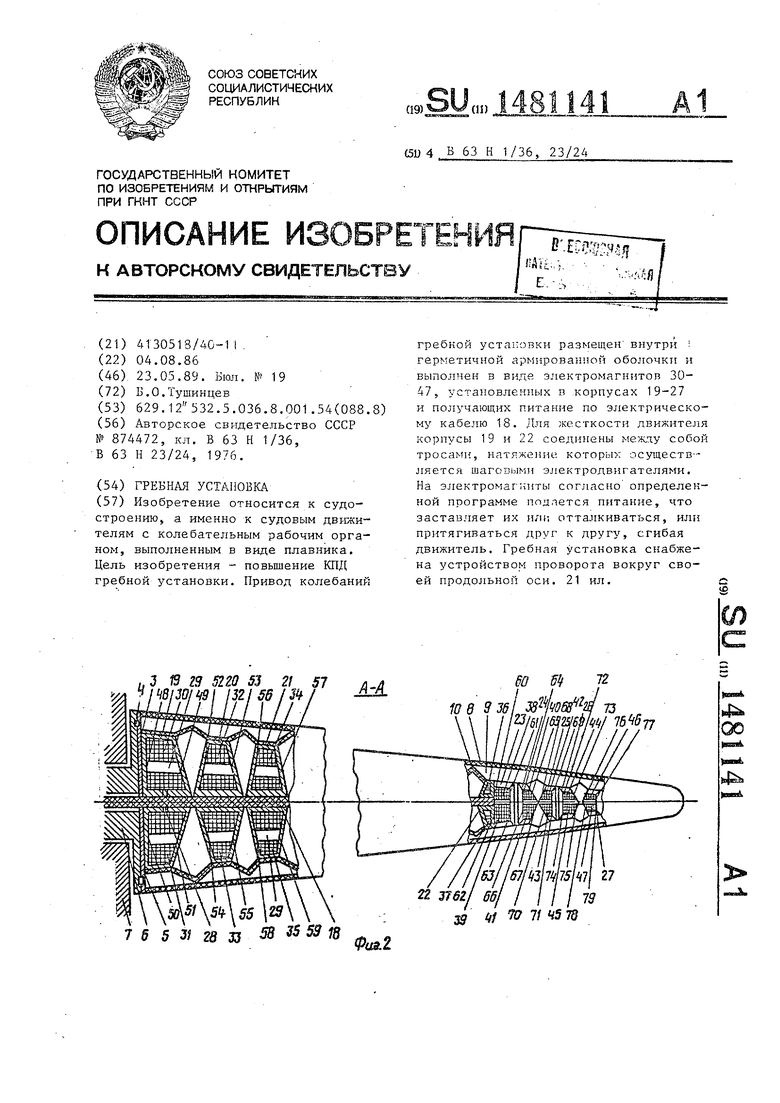
Ь3 19 23 5220 53 21 57 л.л Ч I Wi.ini м i tw I Kfi / J4 / JLU.
7 5 5 31 28 33 38 35 53 18 fe2
60 Wl 72
764577
oo
22 3762/ ffff/ / I j I 73 35 щ Tff 11 45 73
114811
Изобретение относится к судострое- Н|ИЮ, а именно к судовым движителям с колебательным рабочим органом в виде плавника.
Цель изобретения - повышение КПД э гребной установки.
На фиг. 1 показана гребная установка, общий вид; на фиг. 2 - разрез
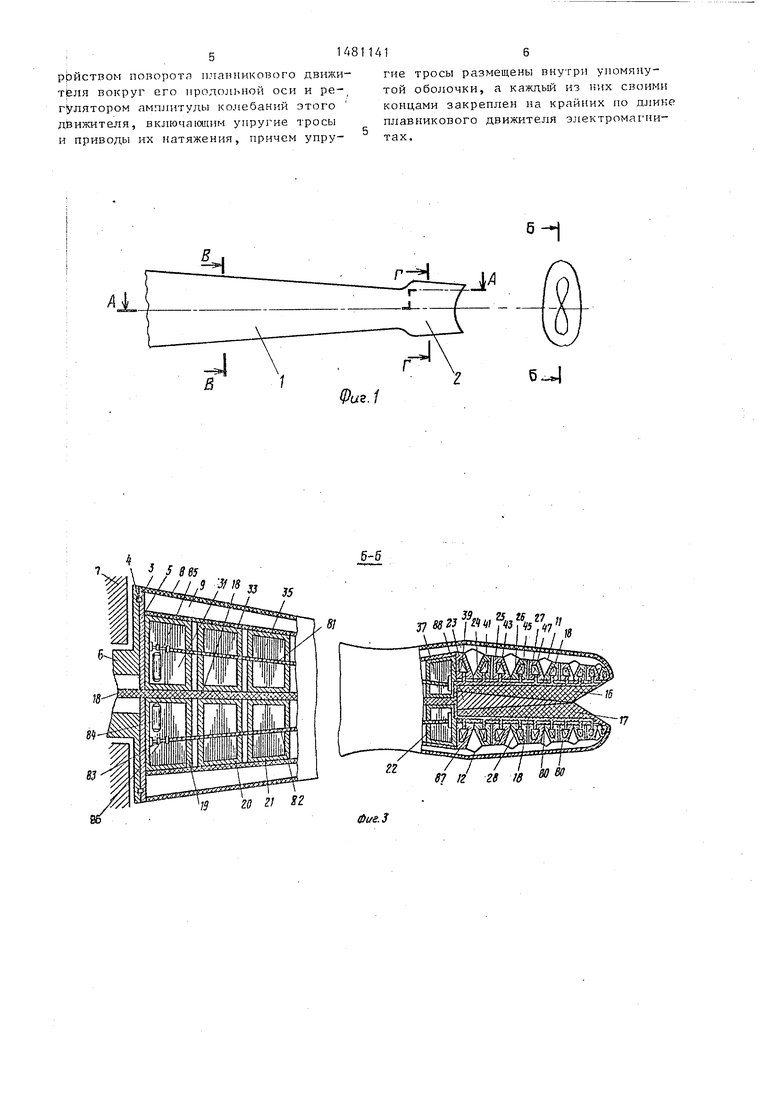
.-А на фиг. 1; на фиг. 3 - разрез -Б на фиг, 1; на фиг.4 - разрез В-В а фиг, 1; на фиг. 5 - разрез Г-Г на иг.1; на фиг. 6 - узел соединения орпусов электромагнитов хвостового :лавника, вид сбоку; на фиг. 7 - то же, вид сверху; па фиг. 8 - гофрированная оболочка, вид сбоку; на фиг„9 то же, вид сверху; на фиг, 10 - кор- ikyc электромагнитов рычага, общий вид; на фиг. 11 - то же, вид сверху;
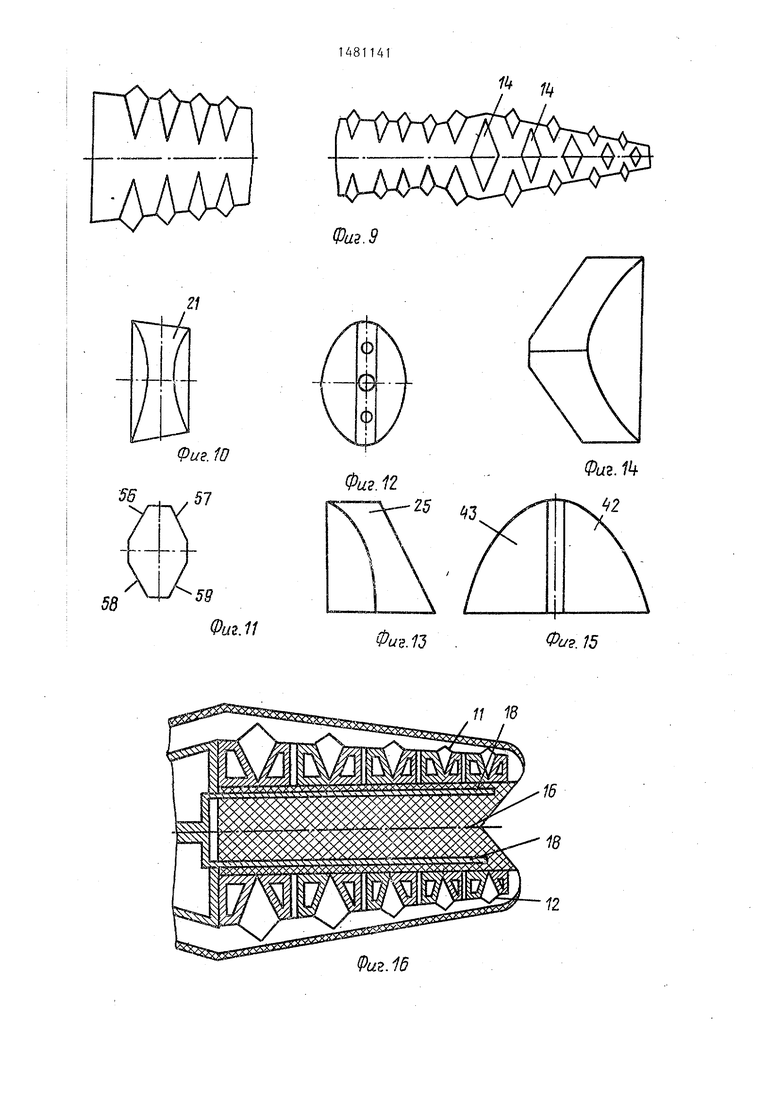
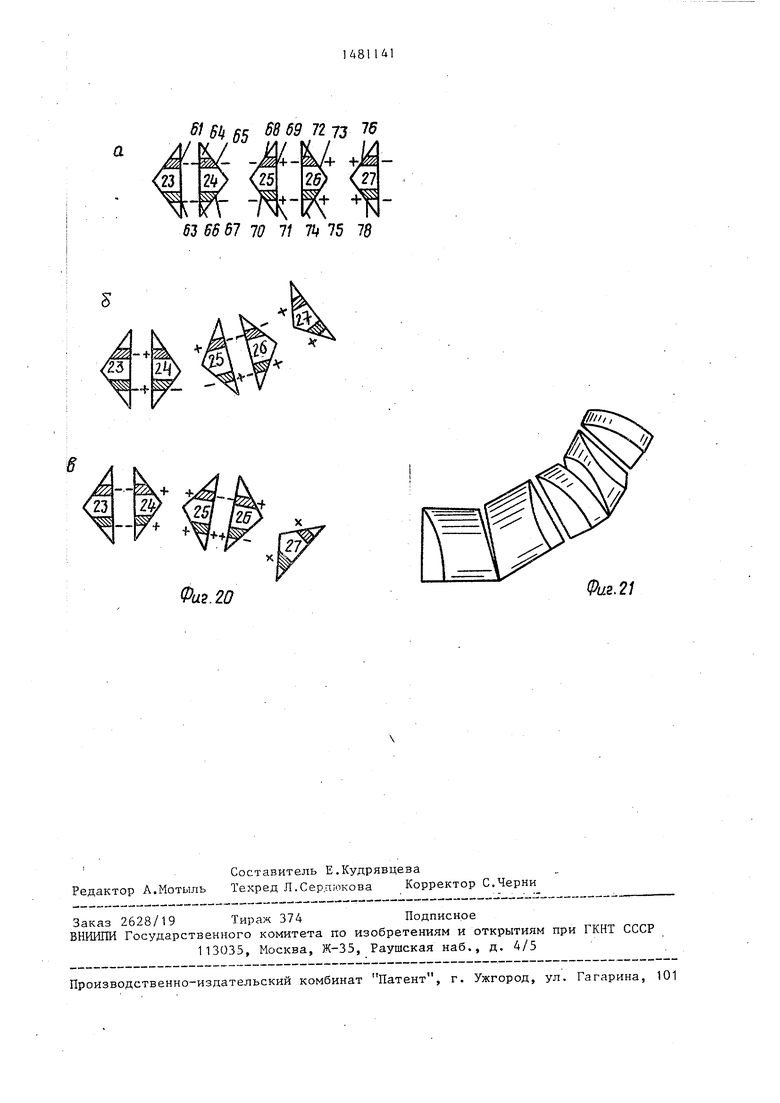
а фиг. 12 - то же, вид сбоку; на иг. 13 - корпус электромагнитов ростового плавника, общий вид; на фиг. 14 - то же, вид сверху; на фиг. 15 - то же, вид сбоку; на фиг. 16 Квостовой плавник с одной резиновой пластиной, разрез; на фиг.17 - вариаты установки электромагнитов гибкого рычага в корпусе: а - установка од- юго электромагнита и цепь корпусов с одним электромагнитом; б -- установ |са двух электромагнитов; в - установ а трех электромагнитов; г - установка четырех электромагнитов; на фиг .18 йарианты установки электромагнитов хвостового плавника в корпусе: а - установка одного электромагнита и цепь корпусов с одним электромагнитом; б - установка двух электромагнитов; в - установка трех электромагни- тов; на фиг. 19 а,б - схекы взаимодействия электромагнитов в цепи гибкого рычага; на фиг. 20 а,б,в - схем взаимодействия электромагнитов в цепи хвостового плавника; на фиг.21 - корпусы электромагнитов в работе.
Гребная установка (фиг.1 - 3) содержит гибкий рычаг 1 и хвостовой плавник 2, выполненные по форме рыбий хвост, источник энергии (не показан) . Основанием 3 гибкий рычаг 1 крепится при помощи шпилек 4 к фланцу 5 вала 6, который проходит через корпус 7 плавсредства (фиг. 2 и 3). Гибкий рычаг 1 и хвостовой плавник 2 покрыты оболочкой 8, которая служит для предохранения гибкого рычага 1 и хвостового плавника 2 от механических повреждений., выполнена из
э
0
0
5 0; о
5
0
5
412
пластмассовой или металлической сетки и приклеена к оболочке 9, выполненной на основе резины и служащей для придания гибкому рычагу 1 и хвостовому плавнику 2 обтекаемой формы рыбьего хвоста, а также для герметичности внутреннего устройства гибкого рычага 1 и хвостового плавника 2. Оболочка 9 приклеена к гибкой гофрированной оболочке 10, выполненной на основе пластмассовой сетки. Оболочка 10 имеет форму гофрированной трубы с уменьшающимся диаметром, которая переходит в две гофрированные трубки 11 и 12 с уменьшающимся диаметром, и состоит из выступов 13 и 14 и гладкой части 15 (фиг. 8 и 9).
Между двумя гофрированными трубками 11 и 12 расположены две резиновые пластины 16 и 17, имеющие клиновидную форму. По всей длине гибкого рычага 1 проложен герметичный гибкий электрический кабель 18. Внутри гофрированной оболочки 10 по всей длине расположены корпусы электромагнитов. Корпусы 19-22 установлены в гибком плавнике 2, Все они отличаются по форме и выполнены из металла или пластмассы. Электромагнит получает питание по электрическому кабелю 18 с помощью проточек 28, соединяющих электрический кабель 18 с каждым электромагнитом. Электромагнит представляет собой катушку определенной формы с фигурным сердечником 29. Внутри корпуса проходит перегородка, разделяющая корпус на две равные части, в каждой из которых расположено по электромагниту 30-47 определенной формы с полюсами 48-79.
Корпусы для электромагнитов хвостового плавника соединены между собой петлями 80 (фиг. 6 и 7).
Для жесткости конструкции движителя корпусы 19 и 22 соединены между собой тросами 81 и 82, проходящими внутри гибкого рычага и закрепленными в корпусах 19 и 22. Натяжение и контроль натяжения тросов 81 и 82 осуществляется в корпусе 19 с помощью шаговых электродвигателей 83 „i 84, соединенных с талрепами 85 и Ь- Питание и управление электродвигателями 83 и 84 осуществляется по электрическому кабелю 18. К корпусу 22 гибкого рычага 1 жестко прикреплены корпусы 23 и 87 пластины, а таь же пластмассовая (стальная) гибкая пластина 88 (фиг. 3) .
Из-за простоты конструктивного решения и наименьшей стоимости установки предпочтительно устанавливать по два электромагнита в каждом корпусе 19-27.
Питание от источника питания (например, дизель-генератора) подается на управляющее устройство (корабельный управляющий вычислительный комплекс) . Согласно программе, заданной вычислительным комплексом, подается питание на электромагниты движителя и шаговые электродвигатели. Электромагниты согласно этой программе притягиваются или отталкиваются и сгибают движитель. При проворачивании
вала 6 вокруг продольной оси движи
тель занимает четыре фиксированных рабочих положения: два положения, когда гибкий рычаг 1 и хвостовой плавник 2 имеют горизонтальное положение, и два положения, когда они им ют вертикальное положение. Это позволяет работать движителю в вертикальной и горизонтальной плоскостях.
Работу гребной установки рассмотрим на примере работы трех корпусов 19, 20 и 21 гибкого рычага 1. Если подать питание на электромагниты 30- 35 гибкого рычага 1 так, чтобы на полюсах 49, 51, 52 и 55 был магнитный (-), а на полюсах 54, 53, 56 и 58 был магнитный (+), то полюсы 51 и 54, 55 и 58 начнут притягиваться, а 49 и 52, 53 и 56 начнут отталкиваться, гибкий рычаг изогнется (фиг. 19а).
Если на полюсы 49, 51, 54 и 53 .подавать магнитный (-), а на полюсы 52, 55, 56 и 58 магнитный (+), то полюсы 49 и 52, 53 и 56 начнут притягиваться, а 51 и 54, 55 и 58 начнут отталкиваться, гибкий рычаг изогнетс в обратную сторону (фиг. 19б).
Так как хвостовой плавник 2 имеет две цепи подобных корпусов, то рассмотрим работу хвостового плавника 2 на действии одной цепи корпусов 23-2
Рассмотрим движение хвостового плавника в одной плоскости. Если подать питание на электромагниты 38-47 тдк, чтобы на полюсах 61,63,65,67,68 70,72,74 был магнитный (-), а на полюсах 64,66,69,71,73,75,76 и 78 был магнитный (+), то полюсы 65 и 68,67 и 70, 73 и 76, 75 и 78 начнут оттял
.,,-
10
0
on
с
0
0
кизагься и хвостовой плавник 2 будет вытянут по прямой, при этом полюсы 61 к 64, 63 и 66, 69 и 72, 71 и 74 начнут притягиваться л растягивать резиновую пластину 16 (фиг. 20а) и геометрическая площадь пластины 16 увеличивается, а значит увеличивается геометрическая площадь хвостового плавника 2. Если теперь снять питание с электромагнитов, то резиновая пластина 16 сожмется, и хвостовой плавник 2 примет свою обычную форму.
Если подать питание на электромагниты 38-47 так, чтобы хвостовой плав- кик 2 изгибался, как гибкий рычаг 1, в одной плоскости и одновременно увеличивался или уменьшал свои геометрические размеры в другой плоскости, то нужно чтобы на полюсах 61,63,65, 67,70,69,74 и 73 был магнитный (-), а на полюсах 64,66,68,71,72,75,76 и 78 был магнитный (+), тогда полюсы 61 и 64,63 и 66,65 и 68,69 и 72,
71и 74, 73 и 76 начнут притягиваться, а 67 и 70,75 и 78 начнут отталкиваться, резиновая пластина 16 растянется (фиг. 206), а значит увеличится геометрическая площадь хвостового плавника 2 и одновременно хвостовой плавник 2 изогнется.
Если на полюсы 61,63,64,6о,70,69,
72и 75 подать магнитный (-) а на полюсы 65 ,67s68,71,74,73,76 и 78 подать магнитный (+), то резиновая пластина 16 сожмется (фиг. 20в), а значит геометрическая площадь хвостового плавника уменьшится и одновременно хвостовой плавник 2 изогнется
в другую сторону.
Формула изобретения
Гребная установка, содержащая плавниковый движитель и привод его колебаний, связанный с электрическим источником энергии, о т л и ч а ю- щ а я с я тем, что, с целью повышения КПД, плавниковый движитель выполнен в виде герметичной армированной оболочки, а привод колебаний размещен внутри этой оболочки и выполнен в виде электромагнитов, равномерно установленных вдоль плавникового движителя по обеим сторонам от продольной плоскости максимальной площади сечения движителя и закрепленных на армированной оболочке, при этом гребная установка снабжена уст514811416
ройством поворота плавникового движи- гие тросы размещены внутри упомяну- теля вокруг его продольной оси и ре-, той оболочки, а каждый из них своими гулятором амплитуды колебаний этого концами закреплен на крайних по длине
движителя, включающим упругие тросы и приводы их натяжения, причем упру5, 5 8в5
ЯЮ Л
35
19 10 V 82
плавникового движителя электромагнитах.
Фиг.1
Ъ
5-5
л ,я
18
П
8 // 28 /в ММ
Фиё.З
L
Фиг. if 80
rh / rfl.
I
Ы
JUJt
Фиг. б
82
Миг. 5
s
fe.7
Фиг. 8
81 U
91 Мф
U -гпф
К ™ф
В ™Ф
.
г/////я Л
C™ r
r
52Ј
V XvSVCi
4i
c
a J
T/7
V.
Ґv
CO
/
i
+
era w
ca
xo
X.
I
Ccs
а
% МП к
ч-/4- 4J
44+ +1
53 55 67 70 11 7k 75 75
fe.20
йй.2/
