(54) ГРЕБНАЯ УСТАНОВКА ПЛАВСРЕДСТВА
| название | год | авторы | номер документа |
|---|---|---|---|
| Активный скуловой стабилизатор качки судна | 2019 |
|
RU2749820C2 |
| ПРИВОД ПЛАВНИКОВОГО ДВИЖИТЕЛЯ | 2005 |
|
RU2284945C1 |
| ПЛАВНИКОВЫЙ ЛОПАСТНОЙ ДВИЖИТЕЛЬ ДЛЯ ПЛАВСРЕДСТВ НАДВОДНОГО И ПОДВОДНОГО ПЛАВАНИЯ (ВАРИАНТЫ) | 2016 |
|
RU2622519C1 |
| Модель для испытания плавниковыхдВижиТЕлЕй | 1979 |
|
SU800028A1 |
| СПОСОБ ОБРАЗОВАНИЯ МАХОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ МАШУЩЕГО ВИНТА | 2010 |
|
RU2482010C2 |
| ПОДВОДНАЯ ЛОДКА | 1992 |
|
RU2027634C1 |
| ДИРИЖАБЛЬ | 1989 |
|
RU2009072C1 |
| Модель летательного аппарата | 1972 |
|
SU447324A1 |
| КОРАБЛЬ С ПЛАВНИКОВЫМ ДВИЖИТЕЛЕМ | 2007 |
|
RU2360831C2 |
| УСТРОЙСТВО МАШУЩИХ КРЫЛЬЕВ С ЦИКЛИЧЕСКОЙ КРУТКОЙ И УПРАВЛЕНИЕМ ПО КРЕНУ | 2005 |
|
RU2298509C2 |
I
Изобретение относится к судосгроению в частности к cyflOMOAenHposaHHroi
Известна гребная установка плавсредства, преимущественно модели, содержащая смонтированный в корпусе плавсредства привод, кинематически связанный с плавниковым движением посредством кри- вощипно-шатунного механизма TlJ.
Недостатком такой установки является то, что возникает боковая составляющая гидродинамической силы при маховых движениях плавникового стебля движигеля, которая приводит к раскачиванию корпуса.
Цель изобретения - стабилизация движения, плавсредства путем уравновешивания составляющих гидромеханических сил, перпендикулярных направлению тяги движителя.
Поставленная цель достигается тем, что гребная установка содержит дополнительный плавниковый движитель, размещенный симметрично относительно продольной оси корпуса с первым плавниковым движителем, при этом основания плавниковых стеблей движителей кинематически связаны между собой, а кинематическая связь между основаниями плавниковых стеблей движителей выполнена в виде зубчатой передачи, одно из колес которой связано с щатуном кривошипношатунного механизма.
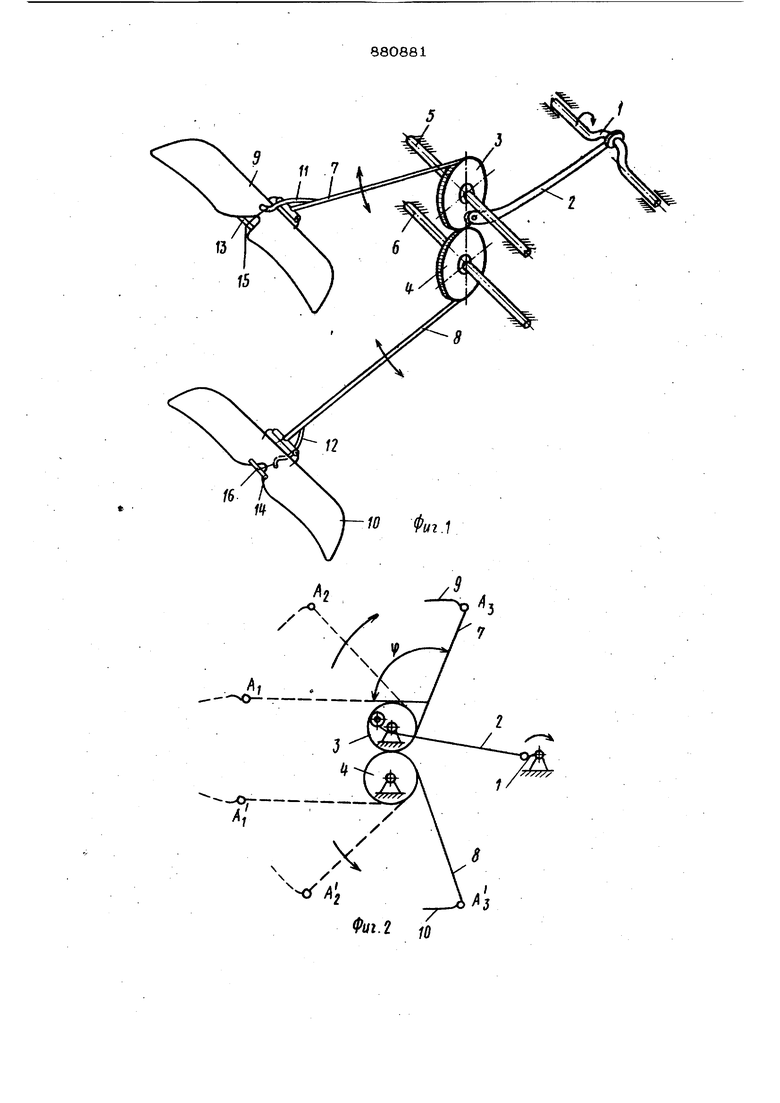
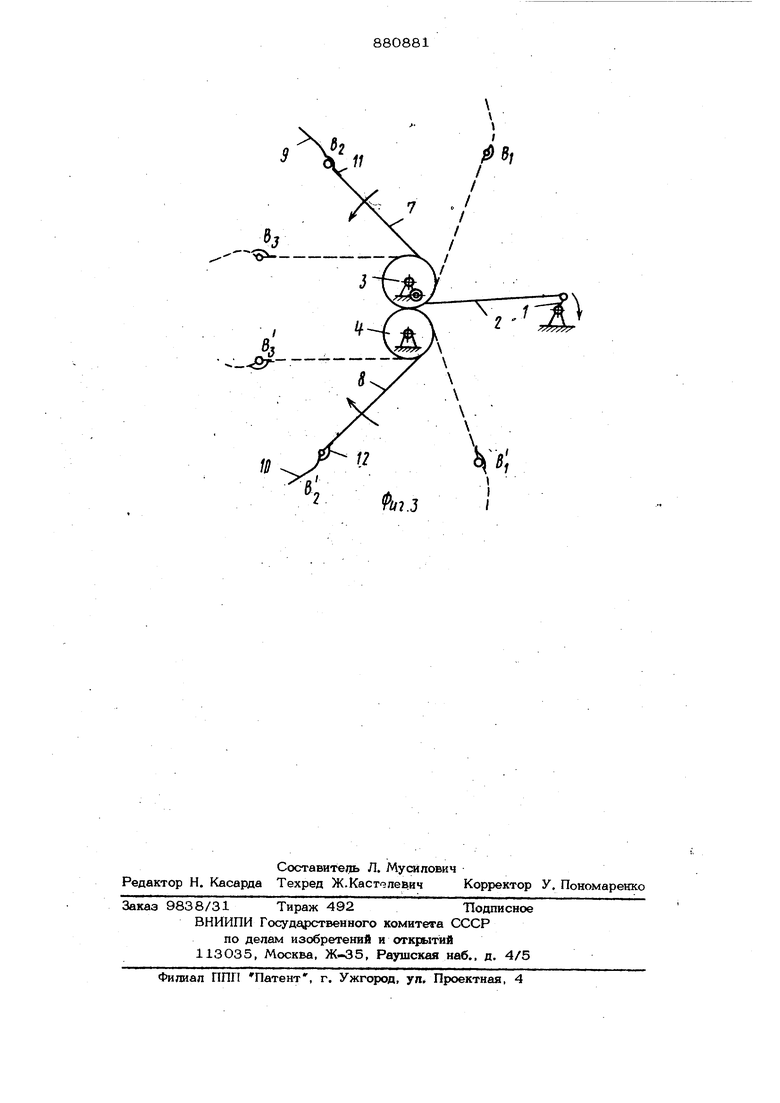
На фиг. 1 изображена схема гребной установки; на (|жг. 2 - работа гребной установки в фазе взмаха; на фиг. 3 -
10 работа гребной установки в фазе маха.
Установка содержит кривошип 1, соединенный посредством щатуна 2 с шестернями 3 и .4, которые установлены на осях
15 5 и 6 и сообщают колебательные движения закрепленным на них плавниковым стебнем 7 и 8, к которым шарнирно прикреплены плавники 9 и 10, движения которых ограничены упорами 11 и 12. Для предотвра20щения захлестывания плавников во время работы между упорами 11 и 12 и закрепленными на плавниках присоединитепьными узлами 13 и 14 установлены огра 36ничитепи 15 и 16 перемещений, например |Иа резиновой нити, плавников 9 и 10. Установка работает следующим образом. В фазе взмаха энергия, подводимая к кривошипу 1 посредством шатуна 2, пере дается шестернями 3 и 4, которые сообщают маховые движения плавниковым cTe бпем 7 и 8. Плавниковые стебли поворачиваются на угол 90. Шарнирно закрепленные на плавниковых (Стеблях плавники 9 и 1О во флюгерном режиме, не создавая силы тяги, последовательно проходят через положение А -Ал-А и A,., После завершения взмаха наступает фаза маха. Плавники 9 и 10, разворачив ясь под действием собственных инерционных сил и сип натяжения ограничителей перемещений 15 и 16 плавников, фиксируются в заданном положении упорами 11 и 12 и последовательно проходят через положение - Вл - В i и В tilо)5т а - э Вр время маха плавников возникают гидродинамические силы. Часть их взаим уравновешивается, другая часть, складываясь, создает тягу плавникового движителя. Использование предлагаемого изобрете ния устраняет поперечные колебания моде лей судов с плавниковыми движителями, что позволяет шире применять в судомо1делированйи бионические системы с аепью их дальнейшего изучения. Формула изоб ре Тения 1.Гребная установка плавсредства, преимущественно модели, содержащая смонтированный в корпусе плавсредства привод, кинематически связанный с1плавникоB iM авижигелем посредством кривошипношатунного механизма, отличающаяся тем, что, с целью стабилизации движения плавсредства путем уравновешивания составляющих гидромрханичес- ких сил, перпендикулярных направлению тяги движителя, она содержит дополнительный плавниковый движитель, размещенный симметртчно относительно продольной оси корпуса с первым плавниковым движителем, при этом основания плавниковых стеблей движителей кинематически связаны между собой. 2.Установка по п. 1, о т л и ч а ю щ а я с я тем, что кинематическая связь между основаниями плавниковых стеблей движителей выполнена в виде зубчатой передачи, одно из колес которой связано с шатуном кривошипночиатунного механизма. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке N 2753127/11, кл В 63 Н 1/36, 16.04.79.
