4ь
00
со со
148
ности торможения и блока 13 ДТ. Кнопочный пост 1 управления, блок 2 управления, магнитные пускатели А и 5 К и СК осуществляют управление запуском и остановкой электродвигателей 6 и 7 К и СК. Устройство 3 звуковой сигнализации обеспечивает подачу предупредительного сигнала перед запуском электродвигателей. При работе К и СК и наличии негабаритных предметов на СК вблизи К датчик 9 негабаритов, воздействуя своим сигналом на блок 2 управления, отключает электродвигатели К и СК. Это фиксирует блок 11 контроля включенного сос397
тояния СК и своим сигналом включает магнитный пускатель 10 и блок 12 задания длительности торможения, который включает блок 13 ДТ. При этом постоянный ток с блока 13 ДТ подается в статорные обмотки электродвигателя 7 СК, Блок 42 задает длительность торможения и по истечении заданного времени своим сигналом отключает блок 13 ДТ и магнитный пускатель 10. Таким образом исключается затягивание негабаритных предметов под К за счет уменьшения свободного выбега рабочего органа посредством ДТ электродвигателя СК. 2 з.п. ф-лы, 4 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ГРУППОЙ ДВУХПОЗИЦИОННЫХ ОБЪЕКТОВ | 1973 |
|
SU368704A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ЗАБОЙНЫХ МАШИН | 1997 |
|
RU2123595C1 |
| КОМПЛЕКС АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ КОНВЕЙЕРАМИ | 2016 |
|
RU2657527C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПУСКА И ТОРМОЖЕНИЯ ЭЛЕКТРОПРИВОДОВ ОТ АВТОНОМНОГО ИСТОЧНИКА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ СОИЗМЕРИМОЙ МОЩНОСТИ | 2014 |
|
RU2596165C2 |
| Электропривод переменного тока | 1987 |
|
SU1434531A1 |
| Устройство автоматического раздельного включения электродвигателей двухдвигательного привода очистного комбайна | 1985 |
|
SU1278456A1 |
| Устройство для предпусковой защиты трехфазного электродвигателя от обрыва цепи обмоток и пробоя изоляции на корпус | 1981 |
|
SU995193A1 |
| РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД ГОРНОГО КОМБАЙНА | 2001 |
|
RU2204715C1 |
| Автоматическое устройство для намагни-чиВАНия и РАзМАгНичиВАНия | 1979 |
|
SU847381A1 |
| Устройство для торможения асинхронногоэлЕКТРОдВигАТЕля | 1979 |
|
SU828349A1 |
Изобретение относится к автоматизации горных машин и может быть использовано в лавах, оборудованных очистными комбайнами (К), работающими со става конвейера, и позволяет повысить надежность и безопасность эксплуатации очистного К и скребкового конвейера (СК). Для этого система управления очистным К и СК снабжена устройством 8 защиты от заклинивания негабаритов, состоящим из датчика 9 негабаритов, магнитного пускателя 10 питания, блока динамического торможения (ДТ), блока 11 контроля включенного состояния конвейера, блока 12 задания длительности торможения и блока 13 ДТ. Кнопочный пост 1 управления, блок 2 управления, магнитные пускатели 4 и 5 К и СК осуществляют управление запуском и остановкой электродвигателей 6 и 7 К и СК. Устройство 3 звуковой сигнализации обеспечивает подачу предупредительного сигнала перед запуском электродвигателей. При работе К и СК и наличии негабаритных предметов на СК вблизи К датчик 9 негабаритов, воздействуя своим сигналом на блок 2 управления, отключает электродвигатели К и СК. Это фиксирует блок 11 контроля включенного состояния СК и своим сигналом включает магнитный пускатель 10 и блок 12 задания длительности торможения, который включает блок 13 ДТ. При этом постоянный ток с блока 13 ДТ подается в статорные обмотки электродвигателя 7 СК. Блок 12 задает длительность торможения и по истечении заданного времени своим сигналом отключает блок 13 ДТ и магнитный пускатель 10. Таким образом исключается затягивание негабаритных предметов под К за счет уменьшения свободного выбега рабочего органа посредством ДТ электродвигателя СК. 2 з.п. ф-лы, 4 ил.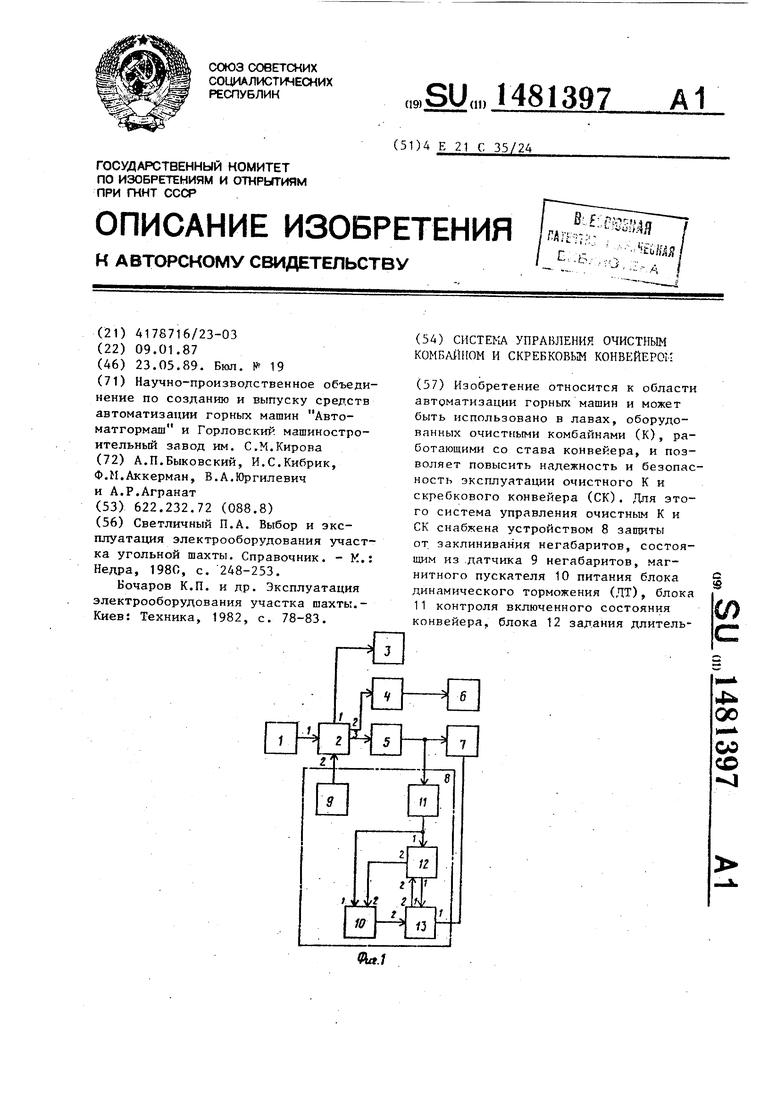
1
, Изобретение относится к автоматизации горных машин и может быть использовано в лавах, оборудованных очистными комбайнами, работающими со става конвейера.
Цель изобретения - повышение надежности и безопасности эксплуатации очистного комбайна и скребкового конвейера.
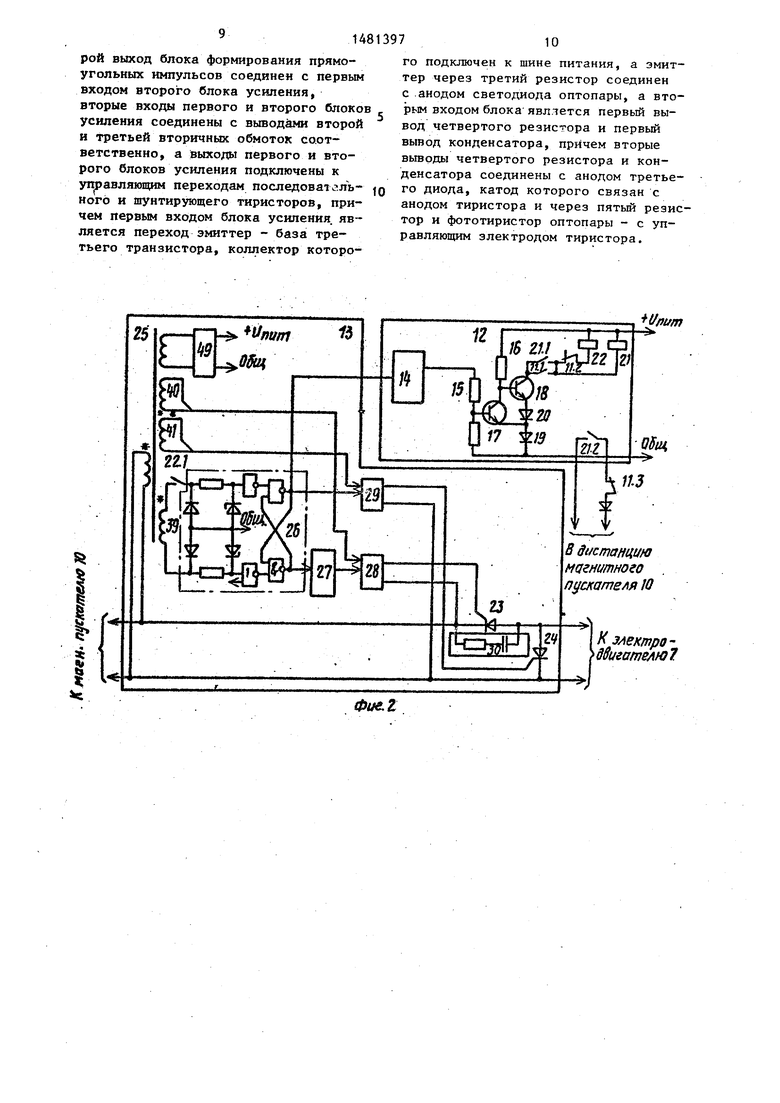
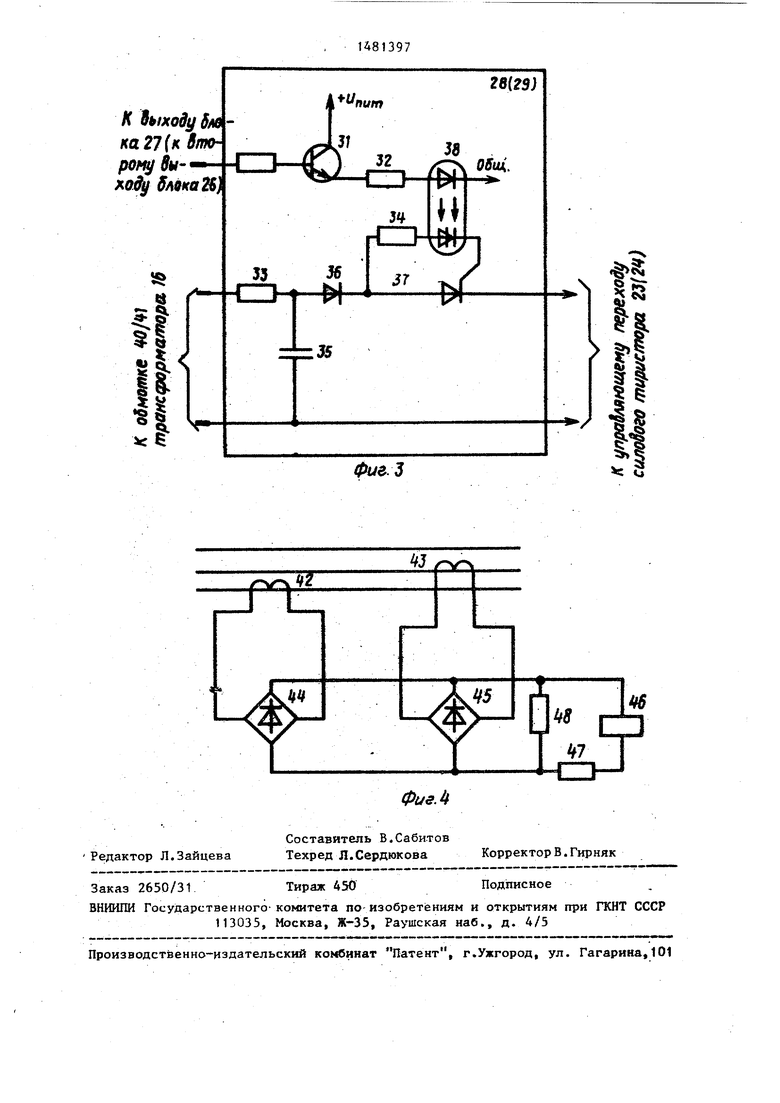
На фиг.1 представлена структурная схема системы управления очистным комбайном и скребковым конвейером; на фиг.2 - функциональная схема блок задания длительности торможения и блока динамического торможения} на фиг.З - принципиальная схема блока
усиления; на фиг.4 - пример реали- - зации блока контроля включенного состояния скребкового конвейера.
Система управления очистным комбайном и скребковым конвейером содержит кнопочный пост 1 управления, блок 2 управления, устройство 3 звуковой сигнализации, магнитный пускатель 4 комбайна, магнитный пускатель 5 скребкового конвейера, электродвигатель 6 комбайна, электродвигатель
7скребкового конвейера, устройство
8-защиты от заклинивания негабаритов состоящее из датчика 9 негабаритов, магнитного пускателя 10 питания блока динамического торможения, блока
11 контроля включенного состояния скребкового конвейера, блока 12 за- ;дания длительности торможения, бло- |ка 13 динамического торможения.
О
5
-
5
0
Блок 12 задания длительности торможения (фиг.2) содержит делитель 14 частоты, первый 15 и второй 16 резисторы, первый 17 и второй 18 транзисторы, первый 19 и второй 20 диоды, первое 21 и второе 22 реле.
Блок 13 динамического торможения (фиг.2) содержит последовательный 23 и шунтирующий 24 тиристоры, трансформатор 25 питания, блок 26 формирования прямоугольных импульсов, фазо- сдвигающее устройство 27, первый и второй блоки усиления 28 и 29, шунтирующую RC-цепь 30.
Блоки, усиления 28 и 29 (фиг.З) содержат третий транзистор 31, третий 32, четвертый 33, пятый 34 резисторы, конденсатор 35, третий диод 36, тиристор 37, оптопару 38.
Выход кнопочного поста 1 управления соединен с первым входбм блока 2 управления, первый, второй и третий выходы блока 2 управления подключены соответственно к входам устройства 3 звуковой сигнализации, магнитного пускателя 4 комбайна и магнитного пускателя 5 скребкового конвейера, выход магнитного пускателя 4 комбайна соединен с электродвигателем 6 комбайна, а выход магнитного пускателя 5 скребкового конвейера соединен с электродвигателем 7 скребкового конвейера, выход датчика 9 негабаритов подключен к второму входу блока 2 управления. Вход блока 11 контроля включенного состояния скребJ1Д81397
нового конвейера связан с выходом магнитного пускателя 5 скребкового конвейера. Выход блока 11 контроля включенного состояния скребкового конвейера подключен к первому входу магнитного пускателя 10 питания блока динамического торможения и к первому входу блока 12 задания длительности
торможения. Первый выход блока 12 за- Ю сдвигающего устройства 27, выход
дания длительности торможения соединен с первым входом блока 13 динамического торможения, а второй выход -подключен к второму входу магнитного пускателя 10 питания блока динами- ческого торможения, а выход магнитного пускателя 10 подключен к второму входу блока 13 динамического торможения, первый выход которого соединен с входом электродвигателя 7 скребкового конвейера, а второй выход соединен с вторым входом блока 12 задания длительности торможения.
В блоке 12 задания длительности торможения выход делителя 14 частоты через первый резистор 15 связан с базой первого транзистора 17, эмиттер этого транзистора через первый диод 19 подключен к общей шине питания, а через второй диод 20 свя- зан с эмиттером второго транзистора 18, коллектор первого транзистора 17 соединен с базой второго транзистора 18 и через второй резистор 16 подключен к шине питания, коллектор второго транзистора 18 через параллельно включенные замыкающий контакт 21.1 первого реле 21 и замыкающий контакт 11.1 блока 11 контроля включенного состояния подключены к первому выводу первого реле 21, который через размыкающий контакт 11.2 блока 11 контроля включенного состояния соединен с первым выводом второго реле 22, а вторые выводы пер- вого- 21 и второго 22 реле подключе- ны к шине питания.
Вторым входом блока 12 задания длительности торможения является вход делителя 14 частоты, первым и вторым выходами являются замыкающие контакты 22.1 и 21.2 соответственно второго 22 и первого 21 реле.
В блоке динамического торможения аноды последовательного 23 и шунтирующего 24 тиристоров подключены к общей точке, последовательный тиристор зашунтирован RC-цепью 30, катод которого подключен к одному выводу, а катод шунтирующего тиристора 24 - к другому выводу первичной обмотки трансформатора 25 питания. Выводы первой вторичной обмотки 39 через замыкающий контакт 22.1 второго реле 22 соединены с входами блока 26 формирования импульсов, а первый выход последнего связан с входом фазокоторого подключен к первому входу блока 28 усиления, а второй выход блока 26 формирования прямоугольных импульсов соединен с первь:м входом второго блока 29 усиления, вторые входьК первого 28 и второго 29 блоков усиления соединены с выводами второй 40 и третьей 41 вторичных обмоток соответственно,а выходы первого и второго блоков усиления подключены к управляющим переходам последовательного 23 и шунтирующего 24 тиристоров. В блоке усиления 28 (29) коллектор третьего транзистора 31 подключен к шине питания, а эмиттер через третий резистор 32 соединен с анодом светодиода оптопары 38, четвертый резистор 33 соединен с вторым выводом конденсатора 35 и анодом третьего диода 36, катод которого связан с анодом тиристора 37 и через первый резистор 34 и фототиристор оптопары 38 с управляющим электродом тиристора 37.
Блок контроля включенного состояния скребкового конвейера (фиг.4) может быть выполнен, например, на основе трансформаторов 42 и 43 Тока, через отверстия которых пропущены силовые шины питания электродвигателя . На выходе трансформаторов тока включены выпрямительные приборы 44 и 45. К выходам выпрямительных приборов подключен релейный элемент 46 с последовательным резистором 47. Выходы выпрямительных приборов эа- шунтированы резистором 48 для исключения перенапряжений при отключенной нагрузке. Контакты 11.1 и 11.2 релейного элемента 46 являются выходом блока 11. Два трансформатора тока необходимы для обеспечения алгоритма работы при обрыве одной из фаз питания электродвигателя.
Система работает следующим образом.
Команда на запуск очистного комбайна и скребкового конвейера подается с кнопочного поста 1 управления)
При этом блок 2 управления обеспечивает включение устройства 3 звуковой сигнализации, в результате чего подается предупредительный сигнал. После этого включаются магнитные пускатели 4 и 5 комбайна и скребкового конвейера и происходит запуск электродвигателей 6 и 7 комбайна и скребкового конвейера.
Если на конвейере находятся негабаритные предметы, например куски породы, размеры которых превышают допустимую высоту .прохождения груза под комбайном, при их подходе к датчику 9 негабаритов, последний срабатывает и выдает команду на отключение электродвигателей скребкового конвейера и комбайна. Момент отключения электродвигателя 7 скребкового конвейера воспринимается блоком 11 контроля включенного состояния скребкового конвейера, который выдает команду на включение магнитного пускателя 10 питания блока динамического торможения и через блок 12 задания длительности торможения разрешает включение блока 13 динамического торможения. При этом постоянный ток с блока 13 динамического торможения подается в статорные обмотки электродвигателя 7 скребкового конвейера, а блок 12 задания длительности торможения начинает отсчет времени торможения. Время торможения задается уставкой, обеспечивающей торможение электропривода до нулевой скорости рабочего органа скребкового конвейера. По истечении времени, заданного уставкой, блок
12задания длительности торможения выдает команду на отключение блока
13динамического торможения и магнитного пускателя 10 питания блока динамического торможения, подача постоянного тока в статорные обмотки электродвигателя 7 скребкового конвейера прекращается, тем самым схема возвращается в исходное, отключенное состояние.
Блок 13 динамического торможения содержит силовые тиристоры 23 и 24, включенные по схеме индукционно-дина мического торможения. Первичная обмотка трансформатора 25 питания подключена к выходу магнитного пускателя 10. Переменное напряжение с вторичной обмотки 39 трансформатора подается на блок 26 формирования пря- моугольных импульсов из напряжения
сети. Блок 26 имеет два выхода, на которых сформированные прямоугольные импульсы разделены по признаку полярности по отношению к входному переменному напряжению и используются в дальнейшем для обеспечения включения силовых тиристоров 23 и 24 при соответствующей полярности
напряжения питающей сети. Сигнал с первого выхода блока 26 поступает на фазосдвигающее устройство 27, на выходе которого формируются импульсы, сдвинутые на требуемый угол относи5 тельно входных импульсов. Этот сдвиг необходим для обеспечения требуемого угла отпирания последовательного тиристора 23 и, следовательно, минимального тока торможения электродви0 гателя.
Сигналы с второго выхода блока 26 и выхода фазосдвигающего устройства 27 поступают на блоки 28 и 29 усиления соответственно. Блок 13 ди5 намического торможения содержит также блок 49 питания электронных элементов схемы.
Блок 12 задания длительности торможения содержит делитель 14 часто0 ты. Выход делителя частоты связан с входом первого транзистора 17. Сигнал с частотой сети на вход блока 12 поступает с второго выхода блока 26.
При включении электродвигателя 7 питание на первичную обмотку трансформатора 25 питания подается через RC-цепь 30, шунтирующую тиристор 23. При этом включается реле блока 11, размыкает свой контакт 11.2 в цепи
0 питания второго реле 22, и замыкает контакт 11.1, включающий первое реле 21, которое своим контактом 21.1 становится на самоподхват. После отключения электродвигателя релейно5 го элемента 46 блок 11 отключается и замыкает свой контакт 11. в цепи питания второго реле 22, последнее включается и замыкает контакт 22.1 в цепи обмотки 39 трансформатора 25.
0 Тем самым обеспечивается подача входного сигнала на блок 26 и схема включается в режим торможения. Делитель 14 частоты начинает отсчет времени торможения, которое определя5 ется заданной уставкой. По окончании времени торможения на выходе делителя 14 частоты появляется уровень напряжения, открывающий первый транзистор 17, при этом второй транзис5
тор 18 закрывается и отключает реле 21 и 22. Контакты 21.2 и 11.3 включены последовательно в цепь дистанционного управления магнитного пускателя 10 и обеспечивают его включение после отключения электродвигателя 7, а также его отключение после окончания торможения.
Таким образом, система управления очистным комбайном и скребковым конвейером позволяет с помощью датчика негабаритов отключить электропривод скребкового конвейера при подходе к комбайну негабаритного груза и исключить его затягивание под комбайн за счет уменьшения свободного выбега рабочего органа посредством динамического торможения электродвигателя скребкового конвейера, при этом исключается взаимное заклинивание комбайна и забойного конвейера негабаритами, представляющими опусность как для обслуживающего персонала так и для применяемого в очистном забое оборудования. Тем самым повышается надежность и безопасность эксплуатации забойных машин.
Формула изобретения
к второму входу блока управления, последовательно соединенных блока контроля включенного состояния конвейера, блока задания длительности торможения и блока динамического торможения, соединяющих выход магнитного пускателя скребкового конвейера с его электродвигателем, и магнитного пускателя питания блока динамического : торможения, первый и второй входы
.
10
15
20
25
30
35
40
45
50
55
которого соединены соответственно с выходом блока контроля включенного состояния конвейера и вторым выходом блока задания длительности торможения, выход магнитного пускателя питания блока динамического торможения соединен с вторым входом блока динамического торможения, второй выход которого соединен с вторым входом блока задания длительности торможения .
к шине питания, коллектор второго транзистора через параллельно включенные замыкающий контакт первого реле и замыкающий контакт блока контроля включенного состояния подключены к первому выводу первого реле, который через размыкающий контакт блока контроля включенного состояния соединен с первым выводом второго реле, а вторые выводы первого и второго реле подключены к шине питания, причем первым и вторым выходами блока задания длительности торможения являются замыкающие контакты соответственно второго и первого .
к одному выводу, а катод шунтирующего тиристора - к другому выводу первичной обмотки трансформатора питания, выводы первой вторичной обмотки через замыкающий контакт второго реле соединены с входами блока формирования прямоугольных импульсов, а первый выход последнего связан с входом фазосдвигающего устройства, выход которого подключен к первому входу первого блока усиления, а второй выход блока формирования прямоугольных импульсов соединен с первым входом второго блока усиления, вторые входы первого и второго блоко усиления соединены с выводами второй и третьей вторичных обмоток соответственно, а выходы первого и второго блоков усиления подключены к управляющим переходам последовательного и шунтирующего тиристоров, причем первым входом блока усиления является переход эмиттер - база третьего транзистора, коллектор которо
го подключен к шине питания, а эмиттер через третий резистор соединен с анодом светодиода оптопары, а вторым входом блока первый вывод четвертого резистора и первый вывод конденсатора, причем вторые выводы четвертого резистора и конденсатора соединены с анодом третьего диода, катод которого связан с анодом тиристора и через пятый резистор и фототиристор оптопары - с управляющим электродом тиристора.
+Uflum
К электро- дбигателю.
Фие.1
| Светличный П.А | |||
| Выбор и эксплуатация электрооборудования участка угольной шахты | |||
| Справочник | |||
| - К.: Недра, 1980, с | |||
| Деревянная повозка с кузовом, устанавливаемым на упругих дрожинах | 1920 |
|
SU248A1 |
| Бочаров К.П | |||
| и др | |||
| Эксплуатация электрооборудования участка шахты.- Киев: Техника, 1982, с | |||
| Парный автоматический сцепной прибор для железнодорожных вагонов | 0 |
|
SU78A1 |
