Ј 30
J
:л
Изобретение относится к автомати , ке и может быть использовано в автоматизированных системах управления на базе цифровых вычислительных машин для гибкого программного управления работой шаговых двигателей (ШД).
Цель изобретения - расширение области применения и повышение производительности устройства.
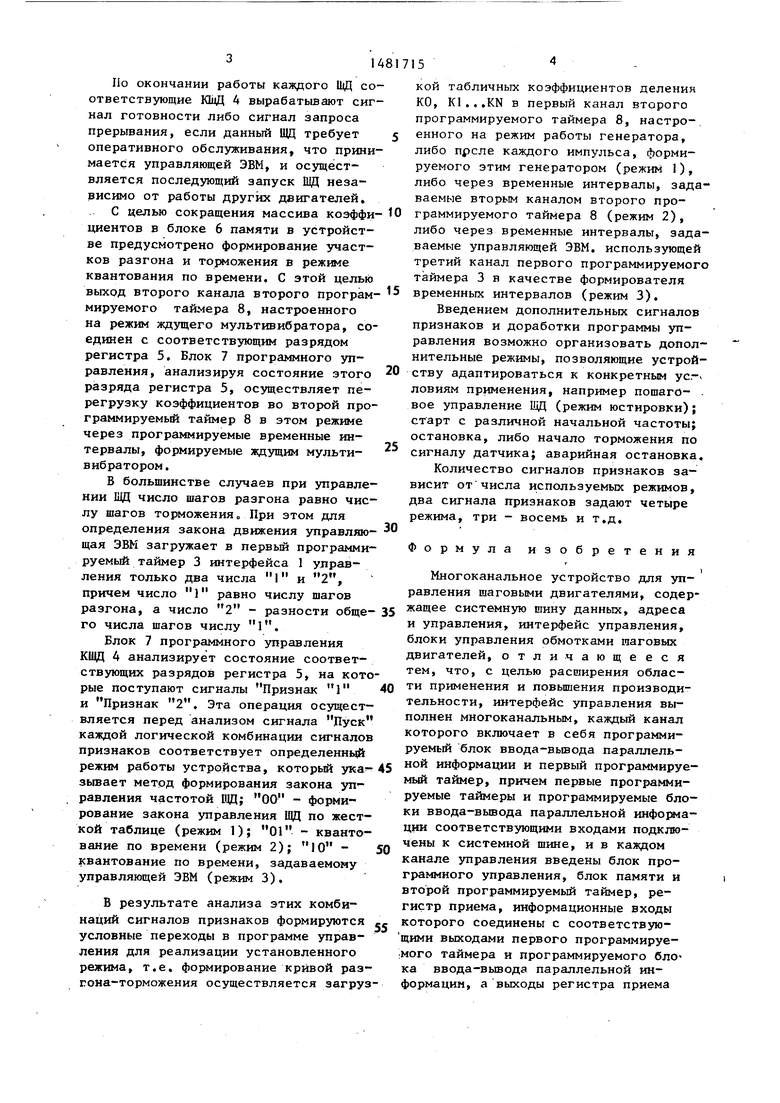
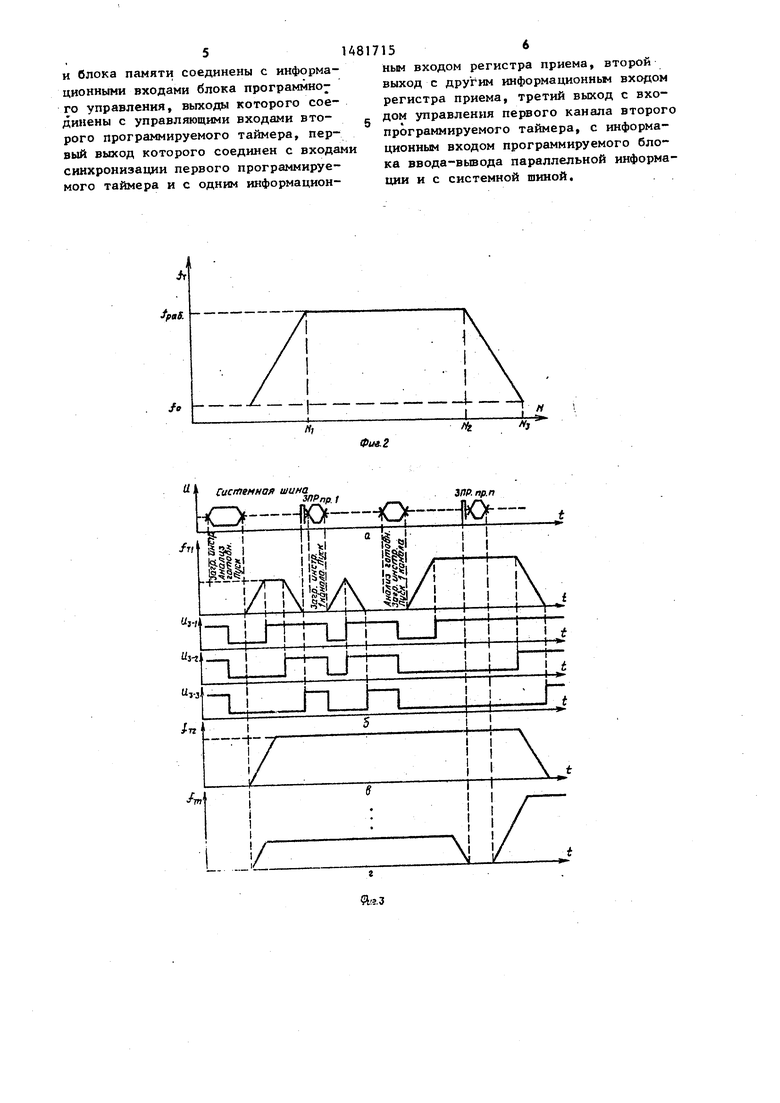
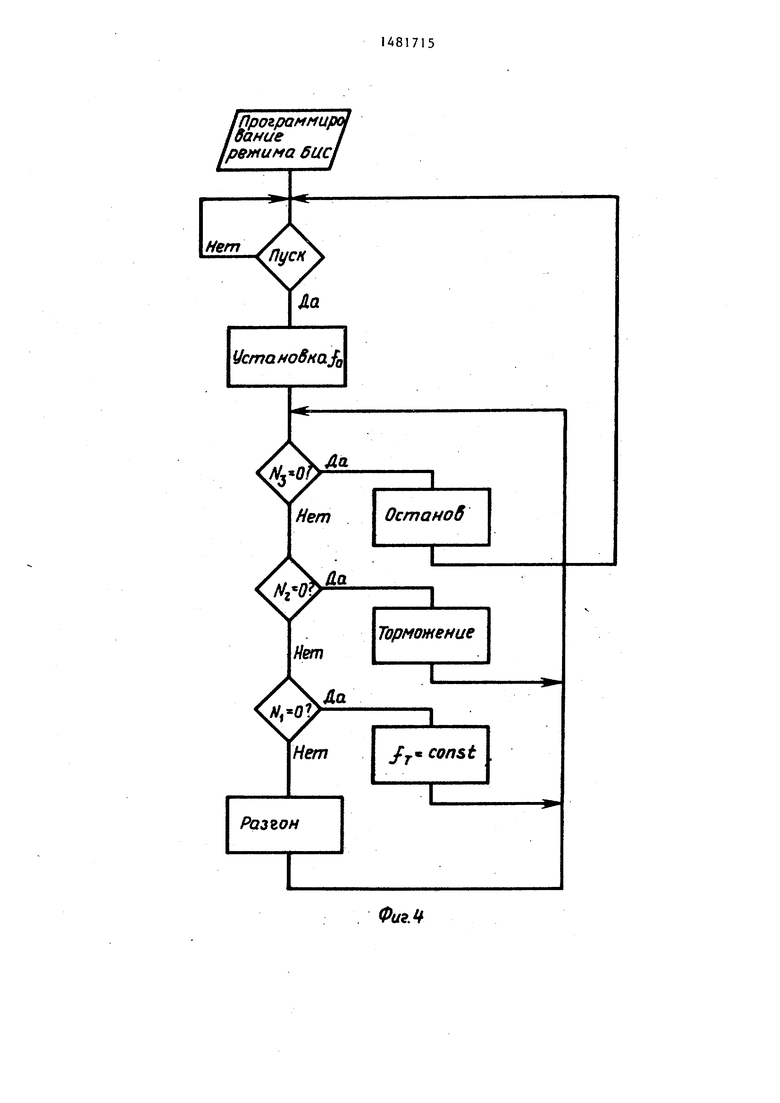
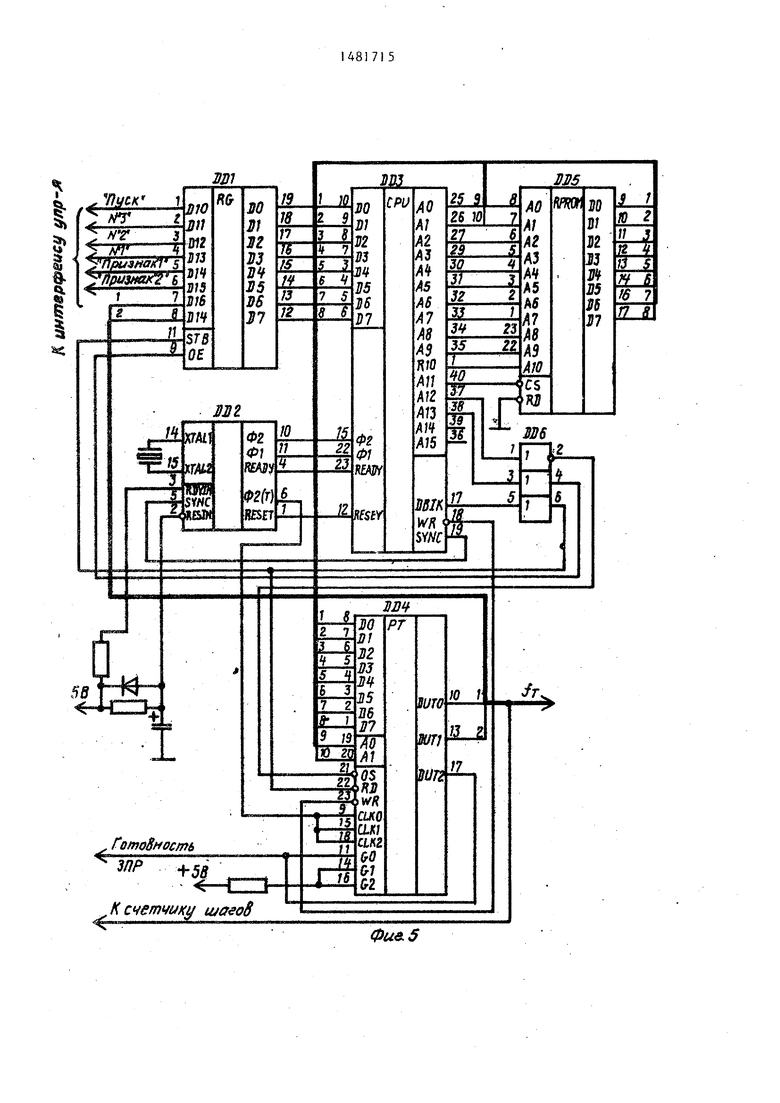
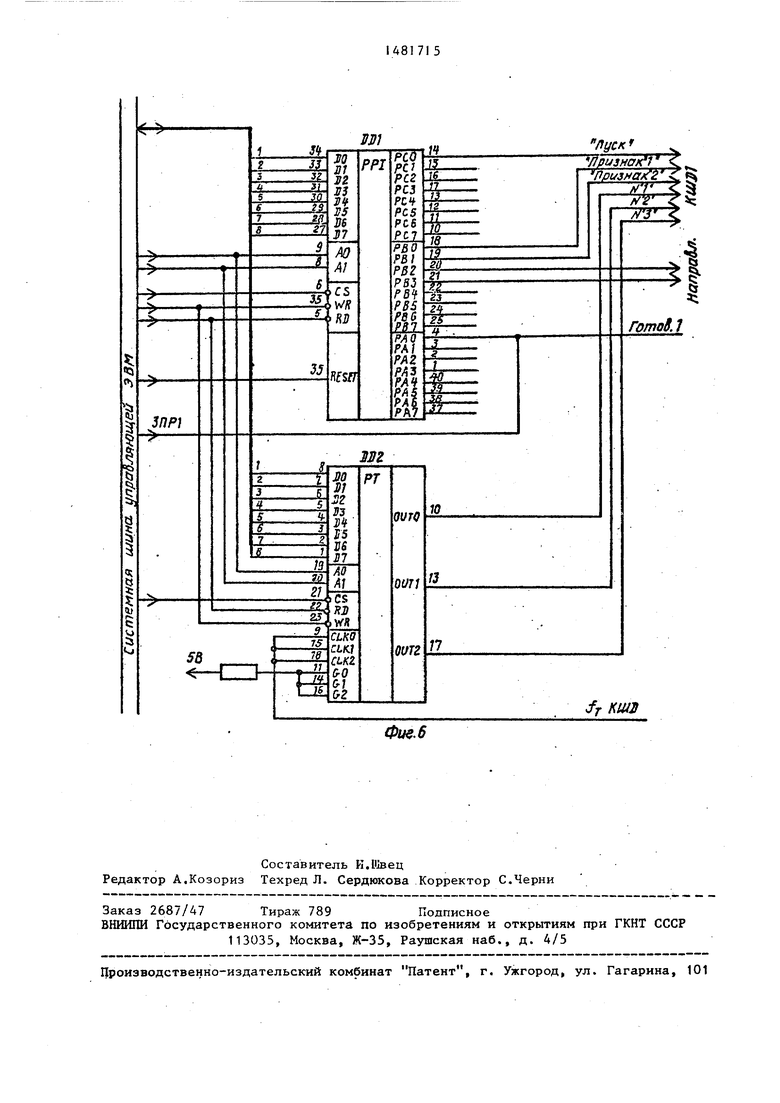
На фиг,1 приведена блок-схема устройства; на фиг.2 - график, иллюстрирующий закон изменения частоты ШД от числа шагов; на фиг.З - временные диаграммы работы устройства; на фиг.4 алгоритм управления устройством; на фиг.З - принципиальная схема контроллера шагового двигателя (КЩЦ); на фиг.6 - принципиальная схема интерфейса управления.
Устройство содержит интерфейс 1 управления, который содержит в каждом канале программируемый блок 2 ввода- вывода параллельной информации и первый программируемый таймер 3, конт- роллеры 4 ВД по числу каналов управления, включающие в свой состав регистр 5 приема, блок 6 памяти, блок 7 программного управления и второй программируемый таймер 8, блоки 9 уп- равления обмотками ШД, системную шину 10 данных, адреса к управления.
На фиг.5 представлен пример конкретного исполнения КЩЦ 4 на основе МП - набора КР 580.
Устройство работает следующим образом.
Управляющая ЭВМ через системную шину осуществляет загрузку в программируемые блоки 2 ввода-вывода параллельной информации и первые программируемые таймеры 3 инструкции, опре-т деляющие параметры движения шаговых двигателей.
В соответствующие разряды портов, настроенные на вывод блоков 2, загружается управляющее слово, определяющее направления движения и два признака (Признак, Признак 2).
В первый-третий каналы первого программируемого таймера 3 загружаются числа 1, 2, 3, где 1 - число шагов разгона, которое опреде- ляет рабочую частоту ШД; 2 - число шагов, определяющее начало торможения; 3 - общее число шагов, которое должен отработать ШД (фиг.2).
5
5
о
с
0
Через соответствующие разряды портов, настроенных на ввод информации блоков 2, управляющая ЭВМ анализирует готовность ШД к запуску и выдаче сигнала Пуск на соответствующие ШД.
Блок 7 программного управления контроллеров 4 ШД через регистр 5 принимает команду Пуск и начинает выполнение программы управления в соответствии с условиями, определяемыми информацией на входах регистра 5.
В первый канал второго программируемого таймера 8 (настроенного на режим работы генератора меандра) блок программного управления загружает коэффициенты деления КО, K1...KN из массива блока 6 памяти.
На выходе второго программируемого таймера 8 формируется импульсная последовательность fh с нарастающей частотой следования импульсов f0, f,,...fN, которая через устройства 9 управления обмотками приводит в движение выбранные ШД в направлении, заданном соответствующими разрядами блока 2.
Одновременно эта же последовательность импульсов поступает на счетные входы первого программируемого таймера 3 интерфейса 1 управления.
Состояние выходов таймера 3 интерфейса 1 управления контролируется блоком 7 программного управления через регистр 5.
При обработке двигателями числа 1 шагов разгона (различного для разных двигателей) увеличение частоты генератора прекращается и ШД работают с частотой, заданной этим числом fN, (фиг.2).
После отработки числа 2 шагов формируется участок торможения ШД: начинается перезагрузка коэффициентов из массива блока 6 памяти блоком 7 программного управления в первый канал второго программируемого таймера 8 в обратной последовательности.
При отработке общего числа 3 шагов блок 7 программного управления устанавливает выход третьего канала второго программируемого таймера 8 в состояние, запрещающее работу первого канала этого таймера, ШД останавливается.
По окончании работы каждого ШД соответствующие КШД 4 вырабатывают сигнал готовности либо сигнал запроса прерывания, если данный ЩЦ требует оперативного обслуживания, что принимается управляющей ЭВМ, и осуществляется последующий запуск ШД неза- рисимо от работы других двигателей.
С целью сокращения массива коэффи- циентов в блоке 6 памяти в устройстве предусмотрено формирование участков разгона и торможения в режиме квантования по времени. С этой целью выход второго канала второго программируемого таймера 8, настроенного на режим ждущего мультивибратора, соединен с соответствующим разрядом регистра 5. Блок 7 программного управления, анализируя состояние этого разряда регистра 5, осуществляет перегрузку коэффициентов во второй программируемый таймер 8 в этом режиме через программируемые временные интервалы, формируемые ждущим мультивибратором.
В большинстве случаев при управлении ЩД число шагов разгона равно числу шагов торможения При этом для определения закона движения управляющая ЭВМ загружает в первый программируемый таймер 3 интерфейса 1 управления только два числа 1 и 2, причем число 1 равно числу шагов разгона, а число 2 - разности обще- го числа шагов числу I.
Блок 7 программного управления КЩЦ 4 анализирует состояние соответствующих разрядов регистра 5, на которые поступают сигналы Признак 1 и Признак 2. Эта операция осуществляется перед анализом сигнала Пуск каждой логической комбинации сигналов признаков соответствует определенный режим работы устройства, который ука- зывает метод формирования закона управления частотой ЩД; 00 - формирование закона управления ЩЦ по жесткой таблице (режим 1); 01 - квантование по времени (режим 2); 10 - квантование по времени, задаваемому управляющей ЭВМ (режим 3).
В результате анализа этих комбинаций сигналов признаков формируются условные переходы в программе управления для реализации установленного режима, т.е. формирование кривой разгона-торможения осуществляется загруз5
0
5
0
5
0
кой табличных коэффициентов делении КО, К1...KN в первый канал второго программируемого таймера 8, настроенного на режим работы генератора, либо прсле каждого импульса, формируемого этим генератором (режим 1), либо через временные интервалы, задаваемые вторым каналом второго программируемого таймера 8 (режим 2), либо через временные интервалы, задаваемые управляющей ЭВМ. использующей третий канал первого программируемого таймера 3 в качестве формирователя временных интервалов (режим 3).
Введением дополнительных сигналов признаков и доработки программы управления возможно организовать дополнительные режимы, позволяющие устройству адаптироваться к конкретным ус- ловиям применения, например пошаговое управление ЩЦ (режим юстировки); старт с различной начальной частоты; остановка, либо начало торможения по сигналу датчика; аварийная остановка.
Количество сигналов признаков зависит от числа используемых режимов, два сигнала признаков задают четыре режима, три - восемь и т.д.
Формула изобретения
t
Многоканальное устройство для управления шаговыми двигателями, содержащее системную шину данных, адреса и управления, интерфейс управления, блоки управления обмотками шаговых двигателей, отличающееся тем, что, с целью расширения области применения и повышения производительности, интерфейс управления выполнен многоканальным, каждый канал которого включает в себя программируемый блок ввода-вывода параллельной информации и первый программируемый таймер, причем первые программируемые таймеры и программируемые блоки ввода-вывода параллельной информации соответствующими входами подключены к системной шине, и в каждом канале управления введены блок программного управления, блок памяти и второй программируемый таймер, регистр приема, информационные входы которого соединены с соответствую- щими выходами первого программируемого таймера и программируемого бло- ка ввода-вывода параллельной информации, а выходы регистра приема
51481
и блока памяти соединены с информационными входами блока программного управления, выходы которого соединены с управляющими входами вто- ч рого программируемого таймера, первый выход которого соединен с входами синхронизации первого программируемого таймера и с одним информацион715
ным входом регистра приема, второй выход с другим информационным входом регистра приема, третий выход с входом управления первого канала второго программируемого таймера, с информационным входом программируемого блока ввода-вывода параллельной информации и с системной шиной.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым электроприводом | 1988 |
|
SU1682974A1 |
| Многоканальное устройство управления шаговым двигателем | 1990 |
|
SU1789970A1 |
| Многоканальное устройство программного управления шаговыми двигателями | 1985 |
|
SU1320794A1 |
| КОНТРОЛЛЕР КАНАЛА МЕЖБЛОЧНОГО ОБМЕНА | 2006 |
|
RU2307389C1 |
| Многоканальное устройство программного управления шаговыми двигателями | 1987 |
|
SU1481714A2 |
| Устройство контроля и управления технологическим комплексом для намотки изделий | 1989 |
|
SU1661721A1 |
| Устройство управления шаговым двигателем | 1984 |
|
SU1259219A1 |
| УПРАВЛЯЮЩАЯ ЭВМ | 2005 |
|
RU2316807C2 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1365342A1 |
| КОНТРОЛЛЕР | 1991 |
|
RU2012043C1 |
Изобретение относится к области автоматики и может быть использовано в автоматизированных системах управления на базе цифровых вычислительных машин для гибкого программного управления работой шаговых двигателей ШД. Цель изобретения - расширение области применения и повышение производительности труда. Устройство содержит интерфейс управления 1 с программируемыми блоками 2 ввода-вывода параллельной информации и первыми программируемыми таймерами 3 в каждом канале управления, регистр приема 5, блок памяти 6, блок программного управления 7, программируемый таймер 8, блоки 9 управления обмотками ШД, системную шину 10 данных, адреса и управления, 6 ил.
Л JpaS.
fo
П,
А
Системная шина зпЈ р /
i
3FIP пр п
/ fa
Программиро ВаниеI
режима бис
Ли
Устамо8ка/0
№0
Нет
М«0
Ж
.Ла
Hern
Разгон
1
Останоб
1
Тормошение
I
1
/г« const
Фиг. if
Фие.5
Луск
//ризнак С Приз а гг «ь
T. S g
ITT
Фие.6
| Устройство управления шаговым двигателем | 1984 |
|
SU1259219A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Многоканальное устройство для управления шаговыми двигателями | 1981 |
|
SU993212A1 |
