Изобретение относится к текстильной промышленности.
Цель изобретения - упрощение процесса управления.
На фиг.1 представлена система для реализации способа; на фиг.2 - графики, иллюстрирующие эффективность предлагаемого способа.
Для реализации способа может быть
использована система управления, содержащая сканирующее измерительное средство 1, в которое входит датчик
2наличия нити 3 и датчик 4 позицией ного измерения натяжения нити 3. Счетчик 5 числа ходов измерительного средства 1 поперек полотна нитей
3связан с входами блока 6 обработки информации и задатчика 7 допустимых Верхнего т и нижнего TH пределов (уровней) натяжения каждой нити.
Выход задатчика 7 связан с датчиком
4натяжения, выходом подключенного
к входу блока 6, связанного также с выходом датчика 2 наличия нити. Выходы блока 6 связаны с входами счетчиков 8 и 9, связанных с индикаторами 10 и 11 соответственно. Выходы счетчиков 8 и 9 соединены с входами схемы 12 сравнения и сумматора 13. Выход последнего соединен с входом запоминающего счетчика 14 и подключен к первому входу логического блока 15, а выход запоминающего счетчик 14 подключен к второму входу логического блока 15. Выходы логического блока 15 и схемы 12 сравнения через переключатель (п) соединены с входом управляемого источника 16 пита- ния, выход которого соединен с труп- пой электроуправляемых нитенатяжителей 17, количество которых в сис4
теме соответствует числу нитей 3 в полотне основы.
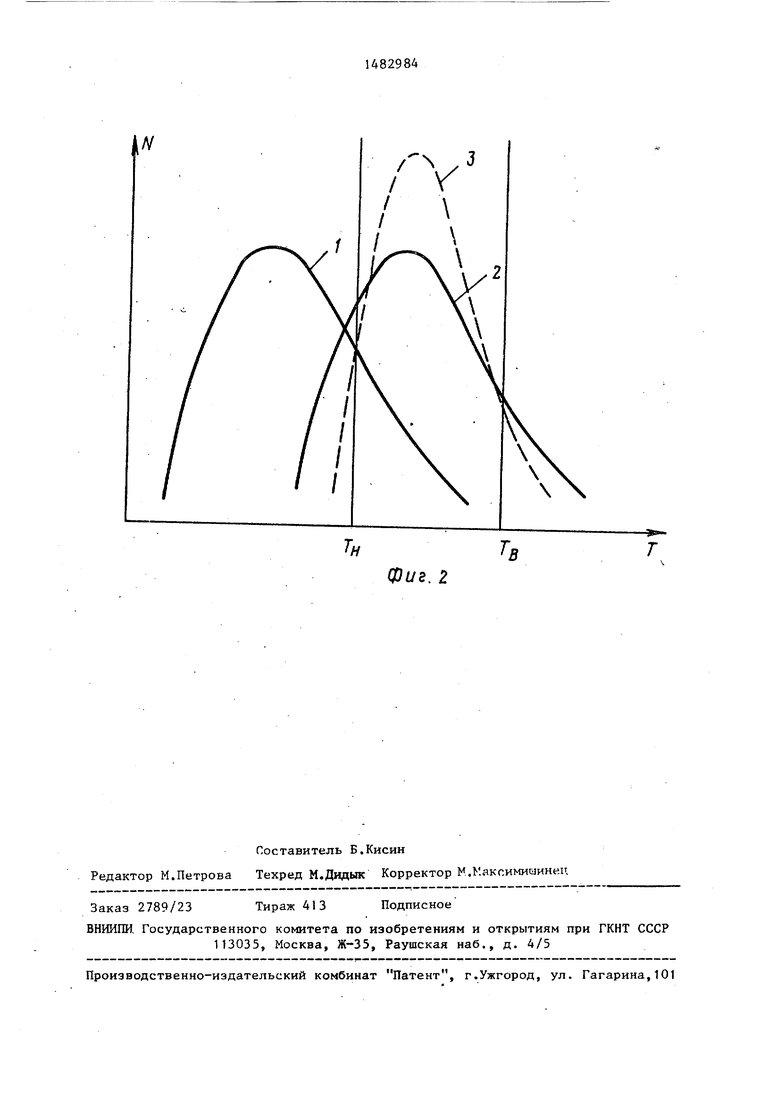
На фиг.2 представлены статические распределения натяжения нитей в полотне основы до (график 1) и после (графики 2 и 3) регулирования, где п оси абсцисс обозначены значения натяжения нитей (Т), а по оси ординат - число нитей (N).
Система автоматического управлени натяжением группы нитей работает следующим образом.
Сканирующее измерительное средство 1 с помощью привода (не показан перемещается поперек полотна основы, образованного нитями 3, и датчик 4 поочередно контактирует с каждой отдельной нитью 3, наличие которой в л зоне контроля определяется датчиком 2. Счетчик 5 числа ходов в зависимости от направления движения измерительного средства I попеременно Формирует на задатчике 7 величину верхнего (т) или нижнего (Тн)уровня натяжения нитей 3, которая передается на датчик 4. Поэтому при работе системы в течение каждого, например четного, прохода измерительного средства 1 измеряется число нитей в полотне основы, имеющих отклонение от верхнего уровня (перетянутые нити), а в течение каждого нечетного прохода - число нитей с отклонениями от нижнего установленного уровня (прослабленные нити).
При контакте с нитью 3 датчика 4 позиционного измерения натяжения нити последний приобретает одно из двух дискретных состояний: О или 1. Эти сигналы одновременно с сигналом о наличии нити 3 в зоне контроля от датчика 2 поступают на блок
5 14829846
6 обработки информации, с выходания от верхнего и нижнего заданного
которого раздельно по двум каналампределов.
передается текущая информация наНачиная с четвертого прохода изсчетчики 8 и 9 о числе нитей, имею-мерительного средства 1, в логичесщих отклонения от верхнего уровняком блоке 15 производится сравнение
(выход а) и от нижнего уровня (вы-массивов чисел с выхода запоминающего
ход Б), Цифровые индикаторы 10 и 11,счетчика 14 (sN,) и сумматора 13
связанные со счетчиками 8 и 9, пока-(ЈN2). Если выполняется условие
зывают в каждый момент времени соот-ю ZN,, SNit то сигнал на выходе логиношение перетянутых и прослабленныхческого блока 15, сформированный в
нитей в полотне основы, что можетпредыдущем цикле управления, не измебыть использовано персоналом для руч-няется и происходит переключение еще
ного вмешательства (замена дефектныходной ступени выходного диапазона
паковок, чистка натяжитепей и т.п.).15 источника 16 питания в том°же наПосле каждого четного прохода измери-правлении.
тельного средства 1 содержимое счет-Если в следующем цикле управления
чиков 8 и 9 передается в схему 12разность ЈГ4 ЈN2) уменьшится, то
сравнения и сумматор 13. Информациясистема снова переключит на одну
из сумматора 13, представляющая со-20 ступень источник 16 питания в данном
бой сумму числа нитей, имеющих от-направлении.
клонения от верхнего и нижнего уста-Если эта разность увеличится, то
новленных уровней, передается в за-На выходе логического блока 15 пропоминающий счетчик 14.изойдет изменение знака сигнала, что
Информация с выходов схемы 12 срав-25 вызовет переключение выходного нанения, сумматора 13 и запоминающегопряжения источника 16 питания на одну
счетчика 14 поступает в логическийступень в противоположном направлеблок 15, На выходе логического бло-нии.
ка 15, связанного с управляемым ис Этот процесс поиска оптимального
точником 16 питания, в зависимости30 состояния системы продолжается до тех
от состояния системы формируется сиг-пор, пока не выполнится условие
нал в виде il или О. ВыходнойiN.N,, т.е. эти числа отличаются
диапазон управляемого источника 16на некоторую заданную величину & К ,
питания разделен на несколько фикси-При этом обеспечивается минимальное
рованных ступеней, переключение кото-35 число нитей, имеющих отклонение от
рых в ту или иную сторону осуществля-заданных пределов. В этом случае неется подачей на управляющий вход ис-зависимо от того, какой сигнал имеетточника 16 питания от логическогося на выходе схемы 12 сравнения, на
блока 15 дискретных сигналов соответ-выходе логического блока 15 появляетствующей полярности.40 ся О и источник 16 питания не получает команды на изменение выходноПервоначально после включения сие-Го напряжения.
темы в работу, после второго проходаЕсли вследствие возмущений, дей- измерительного средства 1 относитель-ствующих на систему управления, про- но полотна основы на выходе схемы 1245 исходит смещение оптимума и вновь сравнения Формируется дискретныйвыполняется условие , то на- сигнал (±1, О), отражающий соот-правление управляющего воздействия с ношение между перетянутыми и прослаб-целью восстановления оптимума, как ленными нитями. Этот сигнал повторя-и в начале функционирования системы, ется на выходе логического блока 1550 определяется по знаку сигнала на вы- и воздействует на управляемый источ-ходе схемы 12 сравнения, который в ник 16 питания, давая команду наэтом случае дублируется на выходе переключение одной ступени его вы-логического блока 15. Дальнейшее ходного диапазона вверх (+1) илифункционирование системы управления вниз(-I), что приводит соответст-55 При поиске оптимума аналогично опи- венно к увеличению или уменьшениюсанному процессу, тока в цепи нитенатяжителей 17 и соответствующим образом изменяет соотно-Процесс регулирования иллюстрирует- шение числа нитей, имеющих отклоне-ся на фиг.2 положением кривых статистического распределения натяжения нитей в полотне основы. Регулировани позволяет переместить кривую распределения из положения (1) в положение (2), когда обеспечивается расположение наибольшего количества нитей (площади по кривой распределения) в заданных границах натяжения.
Так как в этом случае число нитей имеющих отклонения натяжения от заданных пределов минимально, то сканирующее измерительное средство 1 может быть переключено на режим, когда оно сигнализирует о месте расположе- ния нитей, имеющих отклонения натяжения. Устранение персоналом причин, вызывающих отклонения (особенно тех, которые вызывают недопустимо большие отклонения), позволяет уменьшить разнонатянутость нитей в полотне основы и тем самым сузить кривую распределения натяжения нитей (кривая 3 на фиг.2).
Описанная оптимальная система управления, как видно из фиг.2, наиболее эффективна в случае асимметричного распределения натяжения нитей в полотне основы. Для ассортимента нитей, которые в полотне основы могут иметь симметричные распределения натяжения, в частности нормальное, принятый критерий оптимизации - минимум суммы числа нитей, имеющих отклонения натяжения от заданных пределов, - аналогичен по своему смыслу минимуму разности этих чисел.
Операция сравнения числа нитей, превышающих верхний предел, - N(Tfc) и числа нитей, имеющих натяжение меньше нижнего предела, - N(TH), осуществляется схемой 12 сравнения. Поэтому в указанных случаях в систем предусмотрены отключения логического
блока 15 и подача на вход управляемого источника 16 питания сигнала непосредственно с выхода схемы 12 сравнения.
Формула изобретения
Способ автоматического управления натяжением группы нитей преимущественно на сновальной мапине, заключающийся в последовательном циклическом измерении натяжения каждой нити, в определении отклонения измеренного значения натяжения относительно допустимых верхнего и нижнего пределов натяжения и в формировании управляющего воздействия на изменение натяжения , отличающийся тем, что, с целью упрощения процесса управления, после определения отклонений измеренных значений натяжения нитей относительно допустимых пределов определяют соответственно количество нитей, натяжение которых больше верхнего- и меньпе нижнего допустимых пределов натяжения, сравнивают полученные значения, определяют их суммарное количество и запоминают его в каждом цикле измерения, по результатам сравнения в первом цикле измерения формируют управляющее воздействие на изменение натяжения всех нитей, затем, начиная со второго
цикла.измерения, сравнивают фактическое и запомненное в предыдущем цикле
суммарное количества нитей, натяжени которых выходит за допустимые пределы, по результатам сравнения вновь формируют управляющее воздействие на изменение натяжения всех нитей, минимизируя суммарное количество нитей, натяжение которых выходит за допустимые пределы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования длины прокладываемой уточной нити | 1985 |
|
SU1270184A1 |
| Устройство для стабилизации натяжения нитей основы на сновальной машине | 1986 |
|
SU1377306A1 |
| Цифровой фазометр мгновенных значений | 1986 |
|
SU1348745A2 |
| Измеритель давления | 1984 |
|
SU1326920A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ МАШИН И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2664033C1 |
| Способ установки порогов срабатывания электронного чистителя пряжи и устройство для его осуществления | 1990 |
|
SU1836280A3 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ АНАЛОГОВЫХ ОБЪЕКТОВ | 2004 |
|
RU2262128C1 |
| Устройство для стабилизации натяжения нитей при перемотке | 1985 |
|
SU1279934A1 |
| Нитеподающее устройство с электронным регулированием натяжения нити | 1987 |
|
SU1727535A3 |
| Устройство для управления весовым порционным дозатором | 1989 |
|
SU1803907A1 |
Изобретение относится к текстильной промышленности. Цель изобретения- упрощение процесса управления. Процесс регулирования заключается в сравнении числа нитей, натяжение которых превышает верхний допустимый предел натяжения Тв, с числом нитей, натяжение которых ниже нижнего допустимого предела натяжения Тн. Сигнал разницы этих чисел с выхода схемы 12 сравнения, а также сигналы суммы этих чисел с выходов сумматора 13 и запоминающего счетчика 14 через логический блок 15 воздействуют на управляемый источник 16 питания, подключенный к входам всех нитенатяжителей 17. Изменение выходного диапазона источника 16 приводит к увеличению или к уменьшению тока в цепи нитенатяжителей 17 и соответствующим образом изменяет число нитей, натяжение которых превышает допустимые пределы, стремясь свести это число к минимуму. 2 ил.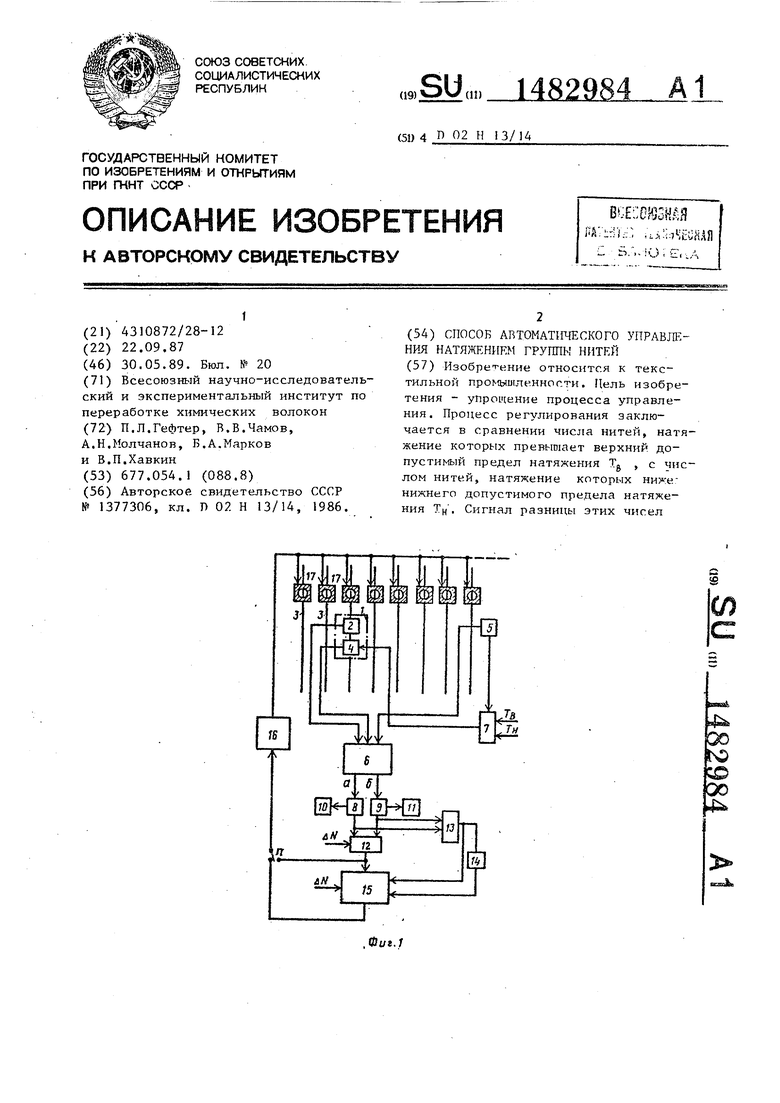
Составитель Б.Кисин Редактор М.Петрова Техред М.Дидык Корректор М.Максимииинец
Заказ 2789/23
Тираж 413
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г.Ужгород, ул. Гагарина,101
Фиг. 2
Подписное
| Устройство для стабилизации натяжения нитей основы на сновальной машине | 1986 |
|
SU1377306A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
