4 ОО СО
со
СО
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ИЗМЕНЕНИЯ ФОРМЫ СТРОЧКИ ШВЕЙНОЙ МАШИНЫ "ЗИГЗАГ" | 1990 |
|
RU2023086C1 |
| Устройство для укладки изделий в пакет и поштучной выдачи изделий из пакета | 1986 |
|
SU1342844A1 |
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| РЕГУЛИРУЕМЫЙ МАЛЬТИЙСКИЙ МЕХАНИЗМ | 2006 |
|
RU2301929C1 |
| Мальтийский механизм | 1984 |
|
SU1254228A1 |
| Мальтийский механизм автооператора | 1985 |
|
SU1273669A1 |
| Мальтийский механизм | 1982 |
|
SU1084521A1 |
| Уплотнитель силоса | 1989 |
|
SU1702933A1 |
| Устройство для осуществления прерывистого вращения | 1977 |
|
SU679752A1 |
| Устройство смены рисунка по утку к бесчелночному ткацкому станку | 1983 |
|
SU1170015A1 |

Изобретение относится к машиностроению и может быть использовано для обеспечения поворота руки манипулятора промышленных роботов. Цель изобретения - расширение кинематических возможностей путем обеспечения регулировки угла поворота ведомого звена. Поставленная цель обеспечивается совместным поворотом эксцентриковых втулок 13 и 14 относительно эксцентриковых дисков, закрепленных на торцах шестерен 7 и 8. В результате цевки 15 и 16 удаляются или приближаются к оси вращения валов 9 и 10, чем обеспечивается изменение длины поводка мальтийского механизма и увеличивается или уменьшается угол поворота креста 5. Поворот креста относительно вала 4 таким образом, чтобы цевки 15 и 16 в начале движения креста входили в радиальный паз 6 по касательной к траектории, описываемой центром вращения цевок 15 и 16, обеспечивает безударную работу устройства и плавный поворот руки манипулятора 19. 3 ил.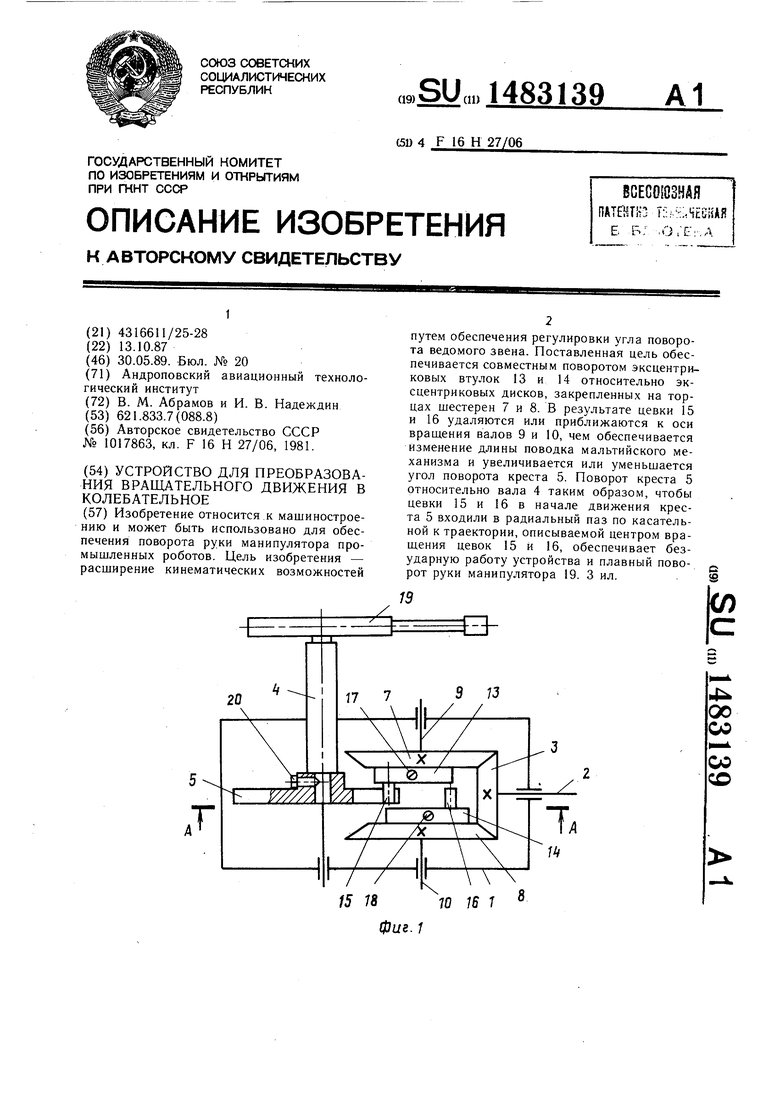
т
Изобретение относится к машиностроению и может быть использовано для обеспечения поворота руки манипулятора промышленных роботов.
Цель изобретения - расширение кинематических возможностей путем обеспечения регулировки утла поворота ведомого звена.
На фиг. 1 изображено устройство для преобразования вращательного движения в колебательное, общий вид; на фиг. 2 - разрез А-А на фиг, 1; на фиг. 3 - схема положения звеньев устройства для преобразования вращательного движения в колебательное при различных углах поворота ведомого звена.
Устройство для преобразования враща тельного движения в колебательное содер жиг корпус 1, размещенные в нем ведущий вал 2 с жестко закрепленной на нем конической шестерней 3, ведомый вал 4 с ведомым звеном, выполненным в виде мальтийского креста 5 с радиальными пазами 6 различной глубины, промежуточное звено, выполненное в виде двух конических шестерен 7 и 8, размещенных на промежуточных валах 9 и 10. На торцах конических шестерен 7 и 8 эксцентрично закреплены два диска 11 и 12, на которых установлены эксцентриковые втулки 13 и 14 с цевками 15 и 16, взаимодействующими с пазами 6 креста 5. Втулки 13 и 14 имеют возможность поворота относительно дисков 11 и 12 и фикстцич в требуемом положении винта- f.iii 17 и 18. При повороте втулок 13 и 14 обеспечивается изменение расстояния от оси вращения О| валов 9 и 10 до центра Bi цевок 15 и 16. Цевки 15 и 16 развернуты друг относительно друга с возможностью поочередного взаимодействия с мальтийским крестом 5, что обеспечивает колебательное движение руки манипулятора 19. Мальтийский крест 5 имеет возможность поворота относительно вала 4 и фиксации в требуемом положении винтом 20.
Для получения требуемых углов поворота мальтийского креста 5 и, соответственно, руки манипулятора 19 предусмотрено выполнение своих пазов 6 различной глубины на кресте 5 (фиг. 2). В данном случае возможны пять различных углов поворота 2г|з-30, 45, 60, 75, 90Т при этом для увеличе- ния количества вариантов возможных углов поворота требуется увеличение числа пазов 6 креста 5.
Глубина паза h определяется по формуле (cosi|;+sinip-l)+r, где - межцентровое расстояние; -ф - половина угла поворота креста 5; г - радиус цевок 15 и 16.
Устройство для преобразования вращательного движения в колебательное работает следующим образом.
При вращении ведущего вала 2 с конической шестерней 3 приводятся во вращательное движение конические шестерни 7 и 8
0
0
5
5
0
5
5
0
5
и втулки 13 и 14с цевками 15 и 16. Одна из цевок, например 15, входит в паз 6 креста 5 и перемещает его вместе с рукой манипулятора 19 в одно из крайних положений на угол 2-ф. Одновременно с конической шестерней 7 в противоположном направлении вращается шестерня 8, а так как цевки 15 и 16 развернуты друг относительно друга, то при дальнейшем вращении вала 2 цевка 15 выходит из паза 6 креста 5 и происходит выстой последнего. Затем в паз 6 креста 5 входит цевка 16, которая перемещает руку манипулятора 19 в другое крайнее положение на угол 2г|), где происходит очередной выстой креста 5. Во время выстоя крест 5 и рука манипулятора 19 фиксируются в крайних положениях одним из известных способов, например с помощью выдвижного подпружиненного фиксатора (не показан)
При дальнейшем вращении вала 2 цикл работы устройства повторяется.
Регулирование угла поворота креста 5 с рукой манипулятора 19 обеспечивается совместным поворотом эксцентриковых втулок 13 и 14 относительно дисков 11 и 12. Поворот креста 5 относительно вала 4 таким образом, чтобы цевки 15 и 16 в начале движения креста 5 входили в радиальный паз 6 по касательной к траектории, описываемой центром вращения цевок 15 и 16, обеспечивает безударную работу устройства и плавный поворот руки манипулятора 19. На фиг. 3 показана схема положений звеньев устройства при углах поворота креста 2 30, 60, 90, 120°. При этом всегда должно соблюдаться условие: 02ВО,900
Формула изобретения
Устройство для преобразования вращательного движения в колебательное, содержащее корпус, размещенные в нем ведущий вал с жестко закрепленной на нем конической шестерней, ведомый вал с ведомым звеном, имеющим паз, промежуточное звено с размещенными на нем коническими шестернями, предназначенными для взаимодействия с шестерней ведущего вала, и две цевки, предназначение для взаимодействия с пазом ведомого звена, отличающееся тем, что, с целью расширения кинематических возможностей путем обеспечения регулировки угла поворота ведомого звена, он снабжен двумя дисками, жестко закрепленными на соответствующих конических шестернях промежуточного звена и эксцентрично установленными относительно них, и двумя эксцентриковыми втулками, установленными на цилиндрических поверхностях соответствующих дисков, цевки размещены на соответствующих эксцентриковых втулках, ведомое звено выполнено в виде мальтийского креста с радиальными пазами различной глубины, а эксцентриковые втулки и мальтийский крест установлены с возможностью поворота и фиксации в заданном положении.
О,
11,12.
В,
Фиг.З
| Устройство для преобразования вращательного движения в колебательное | 1981 |
|
SU1017863A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
