20 17 4 8 Изобретение относится к общему машиностроению и может быть использорано для обеспечения привода манипуляторов промышленных роботов. Известен мальтийский механизм, содержащий корпус, установленные в нем на кинематически связанных ме ду собой зубчатой передачей валах два поводка, каждый в виде диска с цевкой, мальтийский крест и устройство для фиксации креста во врем холостого хода в виде пружины с упо ром lj . Недостатком известного механизма является отсутствие возможности изменения соотношения времени поворота креста и времени выстоя. Цель изобретения - обеспечение возможности плавного изменения соот ношения времени поворота креста и времени выстоя. Указанная цель достигается тем, что в мальтийском механизме, содерж щем корпус, установленные в нем на кинематически связанных между собой зубчатой передачей валах два поводка с цевками, мальтийский крест и устройство для фиксации креста во / время холостого хода, один из повод ков выполнен в виде двух дисков, установленных с возможностью поворо та один относительно другого, а уст ройство для фиксации выполнено в ви де набора секторов, установленных с возмоя ностью разворота и фиксации на валах. На фиг. 1 изображен мальтийский механизм, вид спереди, на фиг. 2 то же, вид сверху, на фиг. 3 - вид на фиг. 2. Мальтийский механизм содержит корпус 1, в котором смонтированы ру ка 2 со охватом (не показан), поводок 3 с пальцем 4 и стопорной шайбой 5, установленные на валу 6, кинематически связанном посредством зубчатых колес 7 и 8 с приводным двигателем 9, мальтийский крест 10. с пазами 11 и 12 и фиксирующими выемками 13, взаимодействующими со стопорной шайбой 5. Мальтийский крест 10 установлен на валу 14 руки 2. В корпусе 1 размещен дополнитель ный поводок, выполненный в виде дву дисков 15 и 16, с второй стопорной шайбой 17, ус.тачовленные на валу 18 Вал 18 связан с валом 6 зубчатым колесом 19. Передаточное отношение зубчатых колес 8 и 19 равноединице. . На диске 16, продвижно установленном на валу 18, закреплен палец 20. С помощью винта 21 через регулировачный паз 22 диск 16 зафиксирован на диске 15. Стопорные шайбы 5 и 17 выполнены в виде набора секторов 23 и 24, которые смонтированы с возможностью разворота на валах 6 и 18 и закреплены гайками 25. На фиг. 1 стрелками обозначено вращение зубчатых колес 7, 8 и 19 и колебательное движение руки манипулятора. Мальтийский механизм работает следующим образом. От двигателя 9 через зубчатые колеса 7, 8 и 19 получают вращения валы 6 и 18, а вместе Q ними поводок 3 и дополнительный поводок в виде двух дисков 15 и 16. Их угловые скорости равны. Палец 4 входит в паз 11 мальтийского креста 10, при этом стопорные шайбы 5 и 17 своими секторами 23 и 24 выходят из фиксирующих выемок 13 креста 10 и освобождают его от стопорения. Крест 10 поворачивается на валу 14, вместе с ним поворачивается рука манипулятора со схватом. При этом паз 12 креста 10 занимает положение для захода пальца 20 диска 16. Повернув руку 2, палец 4 при дальнейшем вращении выходит из паза 11, а стопорная шайба 5 своими секторами 23, войдя в выемку 13, фиксирует крест 10. Происходит выстой креста 10, а вместе с ним и руки 2 в крайнем положении. Мальтийский крест 10 во время выстоя фиксируется также секторами 24 стопорной шайбы 17. Продолжая вращаться, зубчатые колеса 7, 8 и 19 вращают валы 6 и 18, поводок 3 и дополнительный поводок в виде двух дисков 15 и 16. В момент, когда палец 20 подходит к пазу 12, заканчивается выстой мальтийского креста 10. Секторы 23 и 24 стопорных шайб 5 и 17 выходят из фиксирующих выемок 13 мальтийского креста 10, и крест начинает вращаться пальцем 20 в противоположную начальному вращению сторону. При выходе пальца 20 из паза 12 секторы 23 и 24 стопорных шайб 5 и 17 заходят в фиксирующие выемки 13 Мсшьтийского креста 10 и опять происходит выстой креста 10 с рукой В дальнейшем цикл повторяется. Таким образом, мальтийский крест10 с рукой 2 совершает колебательное движение с выстоями. Перемещением диска 16 относительно диска 15 дополнительного поводка меняется местоположение пальца 20 относительно паза 12 мальтийского креста 10, и тем самым регулируется соотношение времени поворота и времени высто Регулировка осуществляется следуницим образом. Отпускается винт 21, и перемещается диск 16 относительно диска 15 по регулировочному пазу 22 на требуемый угол, при этом-устанавливается требуемое соотношение времени (поворота к времени выстоя. Затем диск 16 фиксируется относительно диска 15 затяжкой винта, 21. Далее отпускаются гайки 25, разворачиваются секторы 23 и 24 стопорных шайб 5 и 17 относительно друг друга. После формирования из секторов 23 и 24 стопорных шайб 5 и 17 необходимого размера их закрепляют гайками 25, , Таким образом, предпагаемый мальтийский механизм обеспечивает воз- можность плавного изменения соотношения времени поворота креста и вре- мени выстоя. При использовании.его, например, в манипуляторах промьш ленных роботов значительно сокращается время на их регулировку и переналадку.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для осуществления прерывистого вращения | 1980 |
|
SU956870A1 |
| Устройство для осуществления прерывистого вращения | 1984 |
|
SU1208384A1 |
| Устройство для осуществления прерывистого вращения | 1975 |
|
SU564477A2 |
| Способ автоматической подачи заготовок в технологическое оборудование и устройство для его осуществления | 1984 |
|
SU1301690A1 |
| Устройство для преобразования вращательного движения в колебательное | 1987 |
|
SU1483139A1 |
| РЕГУЛИРУЕМЫЙ МАЛЬТИЙСКИЙ МЕХАНИЗМ | 2006 |
|
RU2301929C1 |
| Мальтийский механизм автооператора | 1985 |
|
SU1273669A1 |
| Автоматический манипулятор | 1989 |
|
SU1660951A1 |
| Устройство для передачи прерывистого движения | 1988 |
|
SU1631217A1 |
| Устройство для осуществления прерывистого вращения | 1974 |
|
SU510605A1 |
МАЛЬТИЙСКИЙ МЕХАНИЗМ, содержащий корпус, установленные в нем на кинематически связанных между собой зубчатой передачей валах два поводка с цевками, мальтийский крест и устройство для фиксации креста во время холостого хода, отличающийся тем, что, с целью обеспечения возможности плавного изменения соотношения времени поворота креста и времени выстоя, один из поводков выполнен в виде двух дисков, установленных с возможностью по ворота один относительно другого, а устройство для фиксации выполнено в вКде набора секторов, установленных с возможностью.разворота и фиксации на валах.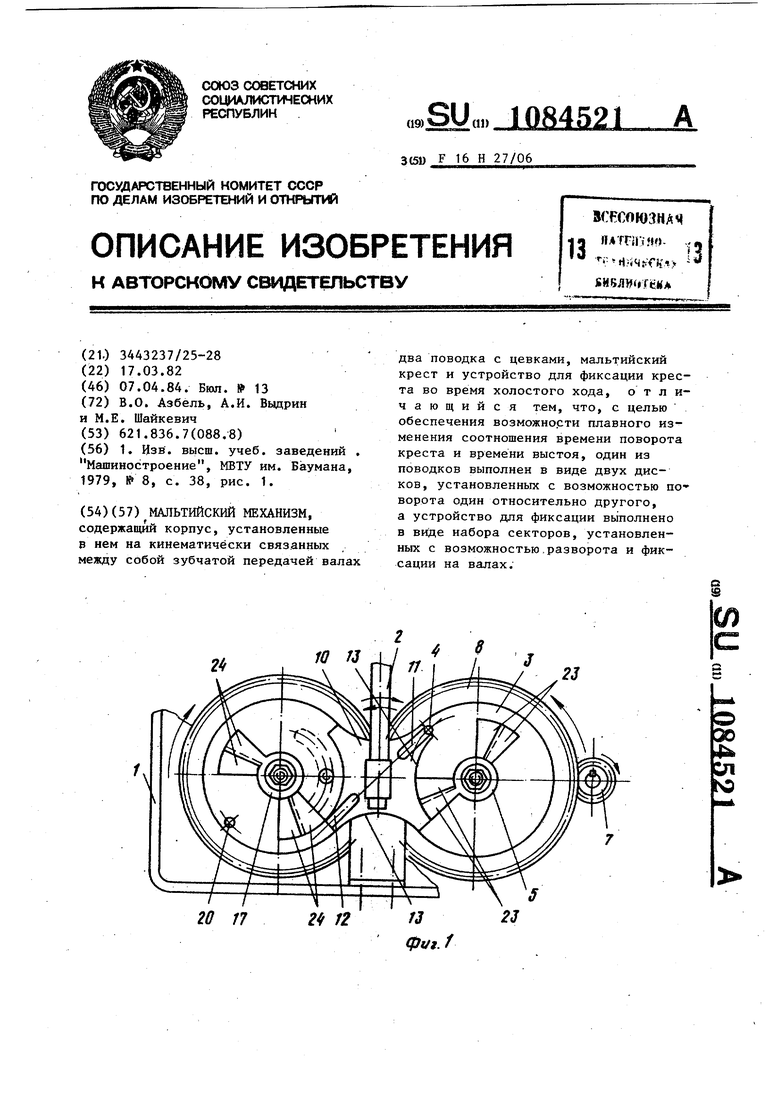
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Изв | |||
| высш | |||
| учеб, заведений | |||
| Машиностроение, МВТУ им | |||
| Баумана, 1979, 8, с | |||
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
