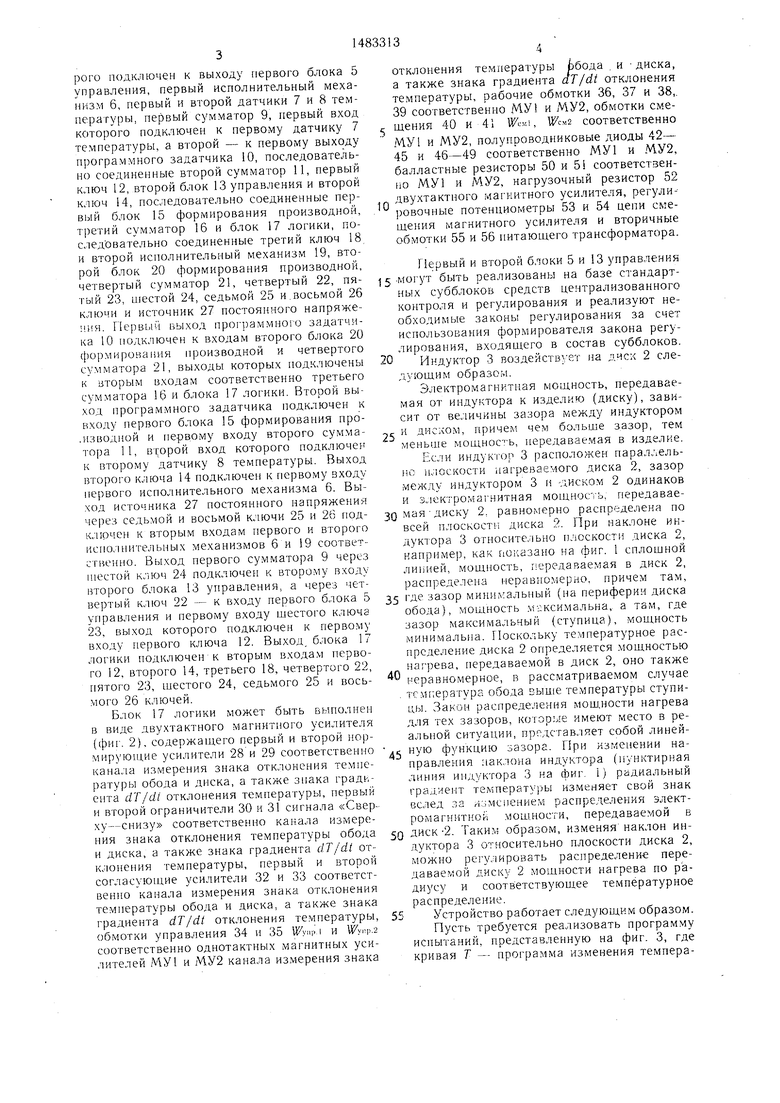
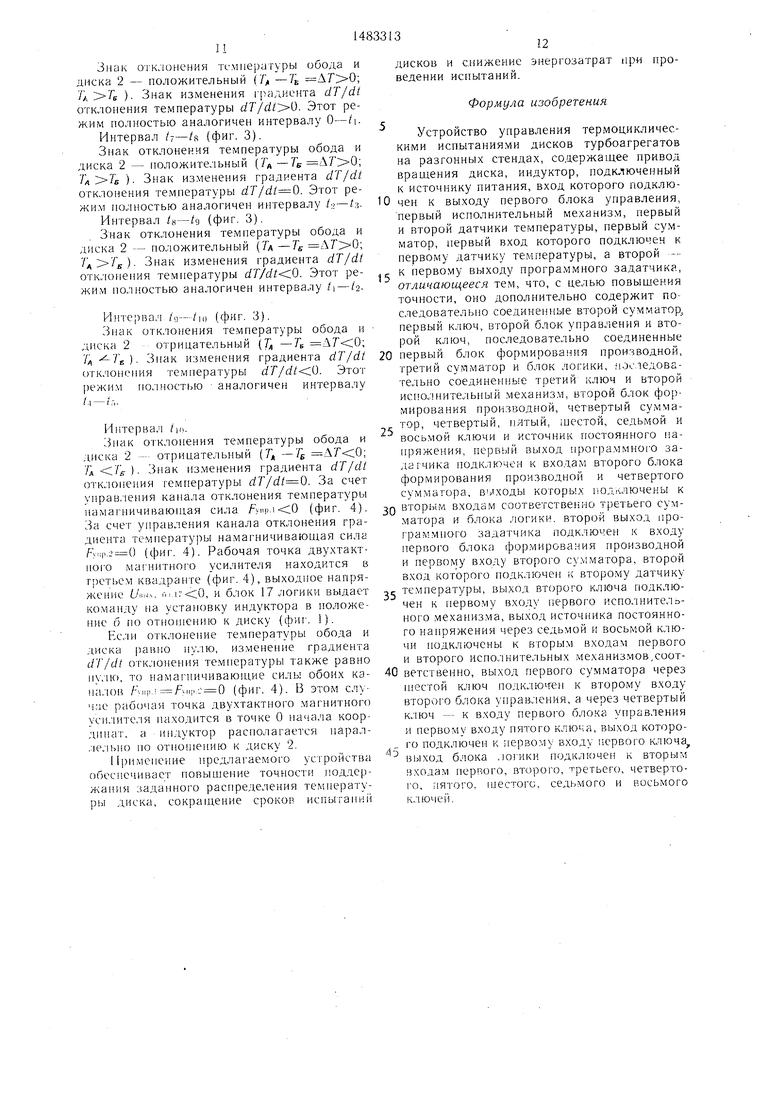
рого подключен к выходу первого блока 5 управления, первый исполнительный механизм 6, первый и второй датчики 7 и 8 температуры, первый сумматор 9, первый вход которого подключен к первому датчику 7 температуры, а второй - к первому выходу программного задатчика 10, последовательно соединенные второй сумматор 11, первый ключ 12, второй блок 13 управления и второй ключ 14, последовательно соединенные первый блок 15 формирования производной, третий сумматор 16 и блок 17 логики, последовательно соединенные третий ключ 18 и второй исполнительный механизм 19, второй блок 20 формирования производной, четвертый сумматор 21, четвертый 22, пя- тый 23, шестой 24, седьмой 25 и восьмой 26 ключи и источник 27 постоянного напряжения. Первый выход программно;о задатчика 10 подключен к входам второго блока 20 формирования производной и четвертого сумматора 21, выходы которых подключены к вторым входам соответственно третьего сумматора 16 и блока 17 логики. Второй выход программного задатчика подключен к входу первого блока 15 формирования про- .изводной и первому входу второго сумматора 11, второй вход которого подключен к второму датчику 8 температуры. Выход второго ключа 14 подключен к первому входу первого исполнительного механизма 6. Выход источника 27 постоянного напряжения через седьмой и восьмой ключи 25 и 26 подключен к вторым входам первого и второго исполнительных механизмов 6 и 19 соответственно. Выход первого сумматора 9 через шестой ключ 24 подключен к второму входу второго блока 13 управления, а через четвертый ключ 22 - к входу первого блока 5 управления и первому входу шестого ключа 23, выход которого подключен к первому входу первого ключа 12. Выход, блока 17 логики подключен к вторым входам первого 12, второго 14, третьего 18, четвертого 22, пятого 23, шестого 24, седьмого 25 и восьмого 26 ключей.
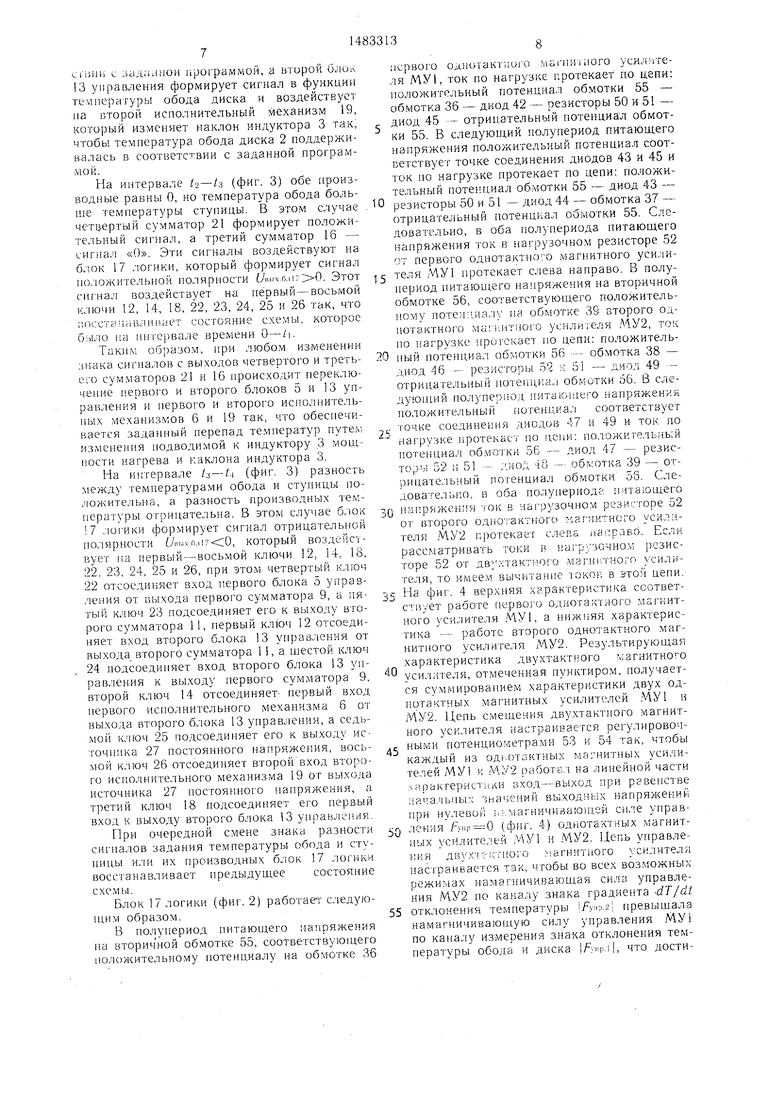
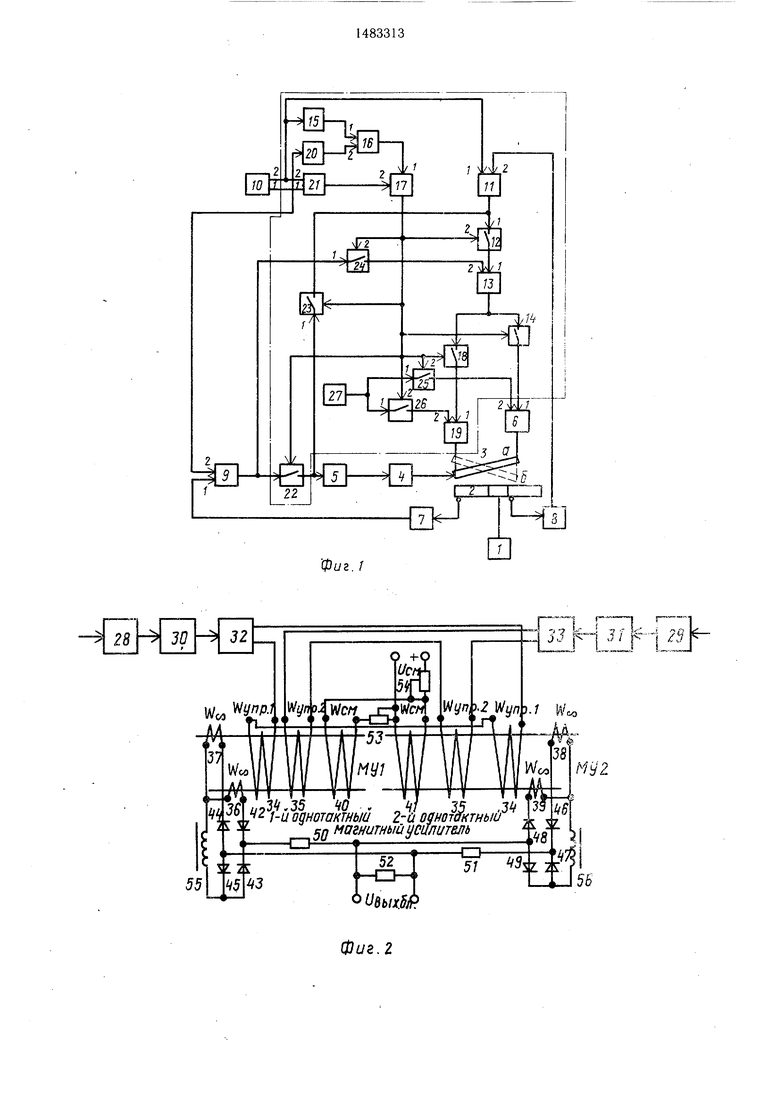
Блок 17 логики может быть выполнен в виде двухтактного магнитного усилителя ((риг. 2), содержащего первый и второй нормирующие усилители 28 и 29 соответственно канала измерения знака отклонения температуры обода и диска, а также знака градиента dT/dl отклонения температуры, первый и второй ограничители 30 и 31 сигнала «Сверху-снизу соответственно канала измерения знака отклонения температуры обода и диска, а также знака градиента dT/dt отклонения температуры, первый и второй согласующие усилители 32 и 33 соответственно канала измерения знака отклонения температуры обода и диска, а также знака градиента dT/dt отклонения температуры, обмотки управления 34 и 35 i и S7yrp.2 соответственно однотактных магнитных усилителей МУ1 и МУ2 канала измерения знака
5
0
5
0
5
0
5
0
отклонения температуры рбода и диска, а также знака градиента aT/dt отклонения температуры, рабочие обмотки 36, 37 и 38,. 39 соответственно МУ и МУ2, обмотки смещения 40 и 41 Wcv.i, Wcv2 соответственно МУ1 и МУ2, полупроводниковые диоды 42- 45 и 46-49 соответственно МУ1 и МУ2, балластные резисторы 50 и 5 соответственно МУ1 и МУ2, нагрузочный резистор 52 двухтактного магнитного усилителя, регулировочные потенциометры 53 и 54 цепи смещения магнитного усилителя и вторичные обмотки 55 и 56 питающего трансформатора.
1ервый и второй блоки 5 и 13 управления могут быть реализованы на базе стандартных субблоков средств централизованного контроля и регулирования и реализуют необходимые законы регулирования за счет использования формирователя закона регулирования, входящего в состав субблоков.
Индуктор 3 воздействует на дис/с 2 следующим образом.
Электромагнитная мощность, передаваемая от индуктора к изделию (диску), зависит от величины зазора между индуктором и диском, причем чем больше зазор, тем меньше мощность, передаваемая в изделие.
Если индуктор 3 расположен параллельно плоскости нагреваемого диска 2, зазор между индуктором 3 и -диском 2 одинаков и электромагнитная мощнос ь, передаваемая-диску 2. равномерно распределена по всей плоскости диска 2. При наклоне индуктора 3 относительно плоскости диска 2, например, как показано на фиг. 1 сплошной линией, мощность, передаваемая в диск 2, распределена неравномерно, причем там, где зазор минимальный (на периферии диска обода), мощность максимальна, а там, где зазор максимальный (ступица), мощность минимальна. Поскольку температурное распределение диска 2 определяется мощностью нагрева, передаваемой в диск 2, оно также неравномерное, в рассматриваемом случае температура обода сыше температуры ступицы. Закон распределения мощности нагрева для тех зазоров, которое имеют место в реальной ситуации, представляет собой линейную функцию зазора. При изменении направления наклона индуктора (пунктирная линия индуктора 3 на фиг 1) радиальный градиент температуры изменяет свой знак вслед за л.мспением распределения электромагнитной мощности, передаваемой в диск-2. Таким образом, изменяя наклон индуктора 3 относительно плоскости диска 2, можно регулировать распределение передаваемой диску 2 мощности нагрева по радиусу и соответствующее температурное распределение.
Устройство работает следующим образом.
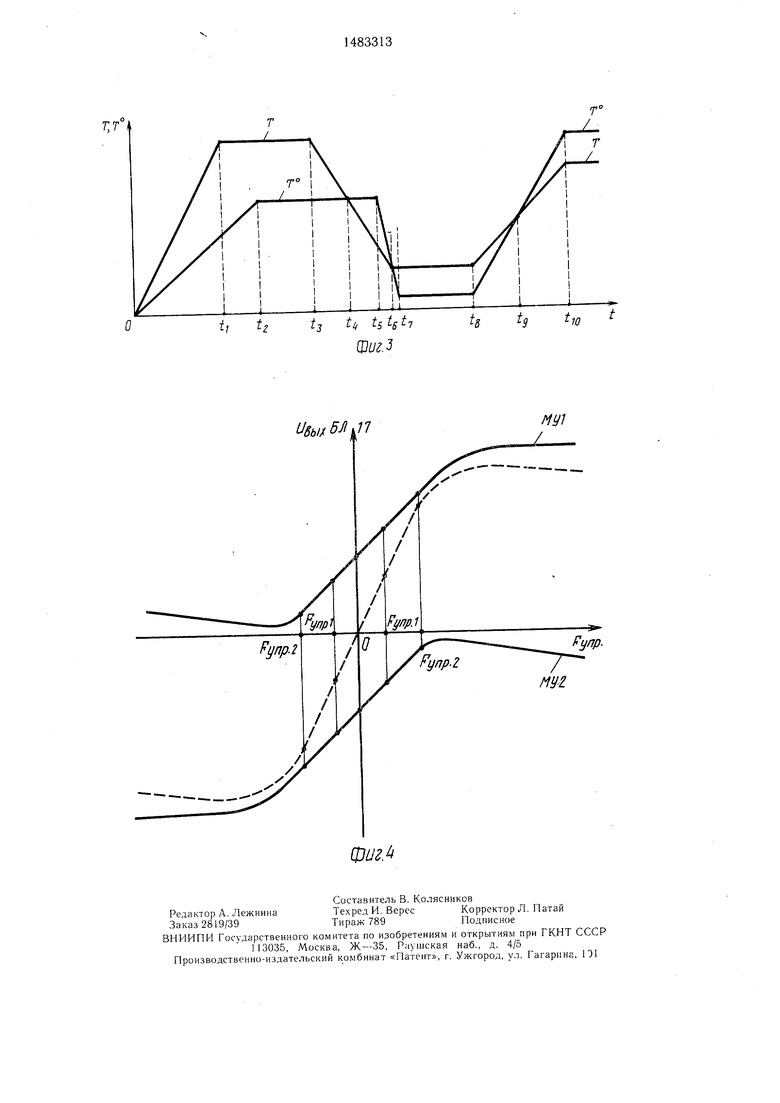
Пусть требуется реализовать программу испытаний, представленную на фиг. 3, где кривая Т -- программа изменения температуры обода диска, а кривая Т° - программа изменения температуры ступицы
На участке 0-1 температура обода диска 2 выше температуры ступицы Скорость нагрева обода также больше скорости нагрева ступицы Сигналы с выходов программного задатчика 10 воздействуют на первый и второй блоки 15 и 20 формирования производной сигнала задания в каждой точке и одновременно поступают на входы четвертого, второго и первого сумматоров 21, 11 и 9 Первый и второй блоки 15 и 20 формирования производной формируют сигналы, пропорциональные скорости изменения температуры диска 2, и воздействуют на третий сумматор 16 С выхода четвертого сумматора 21 разность сигналов поступает на второй вход блока 17 логики, а с выхода третьего сумматора б разность сигналов поступает на пер вый вход блока 17 логики Пусть на интервале 0-/| разность сигналов на выходе чет вертого сумматора 21 положительна, это означает, что температура обода диска 2 выше температуры ступицы Разность сигналов на выходе третьего сумматора 16 также положительна, это означает, что и скорость нагрева обода выше скорости нагрева ступицы Следовательно, на вход блока 17 логики воздействуют два положительных сигнала
Блок 17 логики формир ет поюжигель ный сигнал Увы вт. ir 0. который воыеист вует на первый -восьмой ключи 12, 14, 18 22 23, 24, 25 и 26 так, что четвертый, первый, второй и восьмой ключи 22, 12 14 и 26 замк нуты, а шестой, пятый, трети и седьмой ключи 24, 23, 18 и 25 разомкнуты При этом восьмой ключ 26 подсоединяет выход источ пика 27 постоянного напряжения к второму второго исполнительного механиз ма 1Ь, а третий ключ 18 отключает первый вход второго испо шительного механизма 19 от выхода второго блока 13 управления Второй исполните1ьный механизм 19 изменяет положение индуктора 3 относительно диска 2 так, чтобы расстояние между ин iVKTOpOM 3 и ободом диска 2 было мини мальным В этом положении второй испол нительный мехами м 19 фиксирует тот край индчкгора, который находится над ободом 2 до очередного сигнала с выхода блока 17 логики Одновременно седьмой ключ 25 от соединяет второй вход первого исполнительною механизма 6 от выхода источника 27 постоянного напряжения, а второй ключ 14 подсоединяет первый вход первого исполнительного механизма 6 к выходу блока 13 управления Кроме того, четвертый ключ 22 подсоединяет выход первого сумматора 9 к входу первого блока 5 управления, а первый ключ 12 - выход второго сумматора 11 к входу второго блока 13 управления Таким образом, на первый блок 5 управления воздействует сигнал, равный разности сигнала
задания температуры обода T.HL J 2 i UMI i ла фактической температуры в той же точке а на второй блок 13 чправтения сита ;, равный разности сигна ta задания гемпеоа туры ступицы диска 2 и фактической темпе ратуры ступицы Первый блок 5 управления формирует сигнал, который воздейств ет на регулируемый источник 4 питания так, чтобы температура обода диска поадержи валась на заданном уровне (по заданной
программе), а второй бтк 13 ьраь1ения воздействует на первый испотнитетоный механизм 6, который изменяв накюн ин дуктора 3 относительно диска 2 так, чтобы температура ступицы диска подт,ержива ась
с по заданной программе
При изменении параметров пр01раммы, напоимер а 4dCTi c /, pa . v. гь меж л сигналами ; чср м м / обод (фиг 3) ч те ыерат ры / . г t цич -,) 0 остается по южите ibnoj , 1 о .. i i lu1 1 с ныхо да первого с ммато ч ° и знака Однако cut на т пн производном сигната Т обода, становится равные н пропорционатьныи произвот.нО1
г)
5
0
5
, нч i
Ih i ,м
ну pi i
I л Т
I 1с 1 i
дания темперап pu L i iii.ni о, at к я IK io /китетьным, встетл i ме Ч(.го трс in a
ТОр 16 фОрМИр С| 1.1 iJT llp In IO О KIU1I 1
знака, который i j 1,1 ai 11 it б ю 17 io
ГИКИ Б ОК 17 ЛОГИЬ tl ВГ 1C Rl t (.lir
на ив L ueiee, oio i т ре ьс.к м
маторов 21 ч 16 фор i рче. .
течьнои полярности i i
зозд-зисгвует на первый WI.D
14 18 22 23 24 25 и 2b iav
ктюч 22 отсоединяй вхс i
правтенип от и tpi
5
пятый ключ 23 подбое uii ч-1 вх. не блока 5 ч выхо ; ы t ( v. матора 11 гервыд к юч 1 оноощни. i ход второю е o,jd 11 от i L(bOi и i второго б юка 13 npdB теш я d UICLTC и юч
0 24 подсоединяет выхоа пеп„ого с мулюра 9 к втopo n вход второю И II(MB i. ния, второй ктюч 14 OTtoei user m рвьи вхот. первою исно ihi Te bHoi о мехи п от выхода второго б 13 ,и тмт (ч а седьмой ктюч 25 подсос чняе ои вхо i пеового испотнитетыюго Kxamivia Ь к вы ходу источника 27 постоянного напряжения восьмой ктюч 26 отеое тичяет выхо иноч ника 27 постоянно о напряжения от йюрс i i входа второго испо IMHTC 1ьного мсхаш та 19, а третий к 1юч 18 покое линяет перчыи вход второго исполнмтетьною. механизма 14 к выходу второго бтока 13 хправтения
В резутьтате провелт,енных югическнх операций первый блок 5 прав тения форми рует сигнал в ф нкции температ ры .
5 диска 2 и воздейств ег на источник 4 пита ния который изменяет мощность HOTBOUI мую к индуктор 3 так чтобы температ ра ступицы диска 2 подаержива Ясь в соответ
0
jcUii.uioH программой, а ыорой блил 13 управления формирует сигнал в функции температуры обода диска и воздействует па второй исполнительный механизм 19, который изменяет наклон индуктора 3 так, чтобы температура обода диска 2 поддерживалась в соответствии с заданной программок.
На интервале (фиг. 3) обе производные равны 0, но температура обода больше температуры ступицы. В этом случае четвертый сумматор 21 формирует положительный сигнал, а третий сумматор 16 - сигнал «О. Эти сигналы воздействуют на блок 17 логики, который формирует сигнал положительной полярности 0. Этот сигнал воздействует на первый -восьмой ключи 12, 14, 18, 22, 23, 24, 25 и 26 так, что ; ,П ,-етучги5лннаег состояние схемы, которое б этло па тпервале времени 0 -1.
Таким образом, при любом изменении знака сигналов с выходов четвертого и третьего сумматоров 21 и 16 происходит переключение первого и второго блоков 5 и 13 управления и первого и второго исполнительных механизмов 6 и 19 так, что обеспечивается заданный перепад температур путем. изменения подводимой к индуктору 3 мощ пости нагрева и наклона индуктора 3.
На интервале 1Л-1 (фиг. 3) разность между температурами обода и ступицы положительна, а разность производных темпера 1уры отрицательна. В этом случае блок 7 ло1ики формирует сигнал отрицательной
ПОЛЯрНОСТИ (Ув,„чГ,, КОТОрЫЙ ВОЗДСНС вуег на первый-восьмой ключи 12. 14. 1б, 22. 23. 24. 25 и 26, при этом четвертый ключ 22 отсоединяет вход первого блока о управления от выхода первого сумматора 9, а ля- гый ключ 23 подсоединяет его к выходу второго сумматора 11, первый ключ 12 отсоединяет вход второго блока 13 управления от выхода второго сумматора 11, а шестой ключ 24 подсоединяет вход второго блока S3 управления к выходу первого сумматора 9. второй ключ 14 отсоединяет первый вход первого исполнительного механизма б от выхода второго блока 13 управления, а седьмой ключ 25 подсоединяет его к выход ис гочннка 27 постоянного напряжения, вось- мой ключ 26 отсоединяет второй вход второго исполнительного механизма 19 от выхода источника 27 постоянного напряжения, а третий ключ 18 подсоединяет его первый вход к выходу второго блока 13 управления
При очередной смене знака разности сигналов задания температуры обода и rrvПИЦЫ ИЛИ ИХ ПРОИЗВОДНЫХ блОК 17 ЛО1ИКИ
восстанавливает предыдущее состояние схемы.
Блок 17 логики (фиг. 2) работает следующим образом.
В полупериод питающего напряжения на вторичной обмотке 55, соответствующего положительному потенциалу на обмотке 36
5
0
,-
.,.
(Q
г
Q
5
0
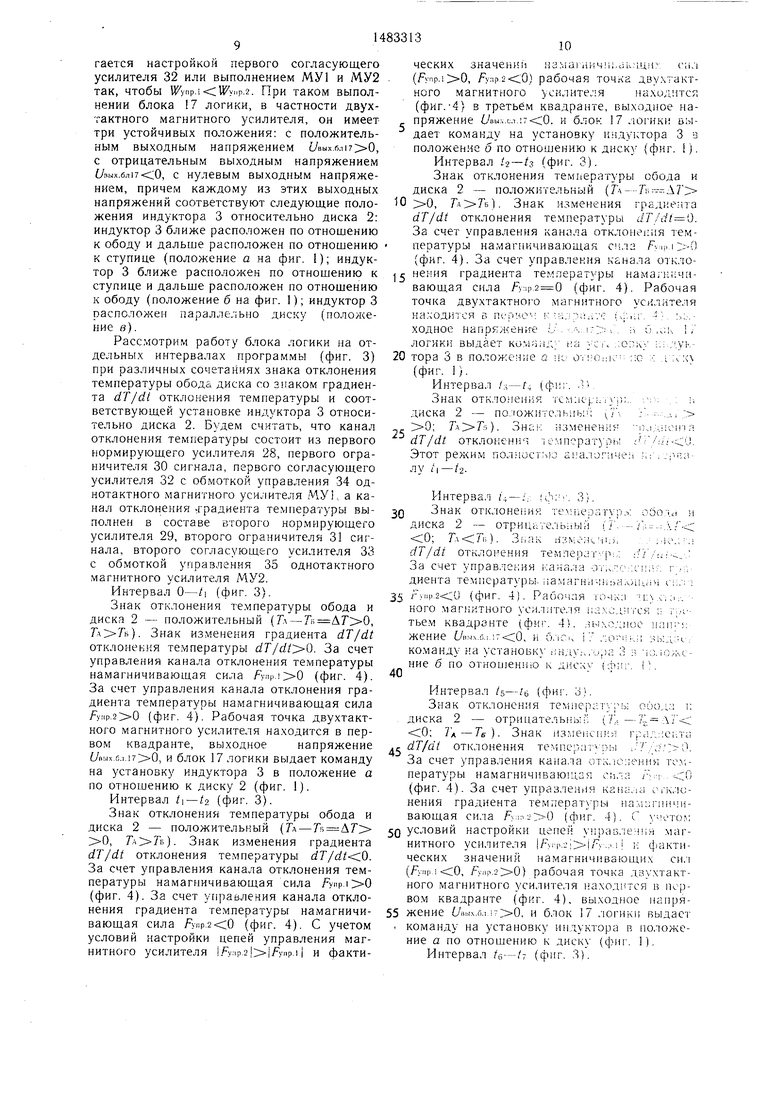
первого однотактиы о siunninioro сил ,теля МУ1, ток по нагрузке протекает по цепи: положительный потенциал обмотки 55 - обмотка 36 - диод 42 - резисторы 50 и 51 - диод 45 - отрицательный потенциал обмотки 55. В следующий полупериод питающего напряжения положительный потенциал соответствует точке соединения диодов 43 и 45 и юк по нагрузке протекает по цепи: положительный потенциал обмотки 55 - диод 43 - резисторы 50 и 51 - диод 44 - обмотка 37 - отрицательный потенциал обмотки 55. Следовательно, в оба полупериода питающего напряжения гок в нагрузочном резисторе 52 -/; первого однотактно о магнитного уси in- теля протекает слева направо. В полупериод питающего напряжения на вторичной обмотке 56, соответствующего положительному потен игалу па обмотке 3S второго ,- нотактного мам.нт.юю МУ2, ток по нагрузке притекает по цепи: положительный потенциал обмотки 56 - обмотка 38 - диод 46 - резисторы 52 : 51 - д;П,т; 49 - отрицательный потенциал обметки 56. В следующий полупепио л питающего напряжения положительный потенциал соответствует тчкс соединения диодов 7 и 49 и ток по нагрузке протекав по цепи: положительный потенциал обмотки 56 - диод 47 - резисторы 52 п 51 - дио,А i8 - обмотка 39 - отрицательный потенциал обмотки 55. Следовательно, в оба полупериод - п-тта.ощего напряжения ок в нагрузочном резисторе 52 от второго одно -ак люго чаг;:и нсто усилителя МУ2 протекает слека па грляо. Если рассматривать гоки в нагрузочном резисторе 52 от двухтактного магт тного усилителя, то имеем вычитание юког, в этом цепи. На фиг. 4 верхняя характеристика ссответ- е в,ет работе первою одногактгюго магнитного усилителя МУ1, а нижняя характеристика -- работе второго однобайтного магнитного чсилигеля МУ2. Результирующая характеристика двухтактного магнитного усил.пеля, отмеченная пунктиром, получается суммированием характеристики двух од- ногактных магнитных усилителей МУ1 и МУ2. Цепь смещения двухтактного магнитного усилителя настраивается регучировоч- ными потенциометрами 53 и 54 так, чтобы каждый из ОД1 отлетных магнитных усилите тей МУ1 ч МУ2 работ i на линейной части ракгерии лли вход-выход при равенстве ,;ai aмытых значений выходных напряжении при нулевой ;, магничиваюшей силе управления /т.ч, (фиг. 4) одиотактчых магнитных усилителей и МУ2. Цепь управления : i - лю; о .MarHHTiioro силчтел/i пас граи вас гея так, чтобы во всех возможных режимах намагничивающая сила управления МУ2 по каналу знака градиента -dT/dt отклонения температуры ,l превышала намагничивающую силу управления МУ по каналу измерения знака отклонения температуры обода ч диска , что достигается настройкой первого согласующего усилителя 32 или выполнением МУ1 и МУ2 так, чтобы Wynp p2 При таком выполнении блока 17 логики, в частности двухтактного магнитного усилителя, он имеет три устойчивых положения с положитель ным выходным напряжением сАыхбт Х), с отрицательным выходным напряжением ЈАыхв .О, с нулевым выходным напряже нием, причем каждому из этих выходных напряжений соответствуют следующие поло жения индуктора 3 относительно диска 2 индуктор 3 ближе расположен по отношению к ободу и дальше расположен по отношению к ступице (положение а ча фиг 1), индук гор 3 ближе расположен по отношению к ступице и дальше расположен по отношению к ободу (положение б на фиг 1), индуктор 3 паспстожеп лараллеibno дисчу (похоже ние в)
Рассмотрим работ) блока логики на от дельных интерватах программы (фиг 3) при различных сочетаниях знака отклонения температуры обода диска со э аком градиен та dT/dt OTKJIOI ения температуры и соответствующей установке ин ктора 3 относи тетьно диска 2 считать что канал отклонения темьературы состоит из первого нормирующего усилителя 28, первого огра ничителя 30 сигнала первою согласующего усилителя 32 с обмоткой управления 34 од нотактного магнишого уел штеля ЧУ1 а ка нал отклонения градиента темпеоа ры вы полнен в составе вгорого нормирующее усилителя 29, второго ограничителя 31 сиг нала второго соглас ющ го усилителя 33 с обмоткой ушавпзнчя 35 однотактного магнитного силителя МУ2
Интернат 0-1 (фиг 3)
Знак отклонения температуры обода и дискт 2 положительный (Т - Т , ) Знак изменения градиента dT/dt отктонен я температуре dT/dt За счет управления каната отклонения температуры намагничивающая сила (фиг 4) За счет управления канала отклонения гра диента температуоы намагничивающая сила / (фиг 4) Рабочая точка двухтакт ного магнитного усилителя находится в пер вом квадранте ВЫХОДНОР напряжение с/в х с 1 0 и блок 17 логики выдает команду на установку индчктора 3 в положение а по отношению к диску 2 (фиг )
Интервал t - tj (фи1 3)
Знач отклонения температуры обода и диска 2 - положительный (7д - Л -ДГ; 0 Т Тъ) Знак изменения градиента dT/dt отклонения температуры dT За счет управления канала откпонения тем пературы намагничивающая сила (фиг 4) За счет правления канала откло нения градиента температуры намагничи вающая сила /Гмр2 ;0 (фиг 4) С учетом условии настройки цепей управления маг
нитного усилителя
V р
F 1 ip 11 и факти
ческих значении и .dim (Л Р 1 0, ,Рм1-.СИ рабочая ного магнитного и ите (фиг 4Ч в третьем квадранте пряжение ЈЛы л 0 ь бло дает командч на установк i
ц
точ с. я
ц i
u,3
( i i
dKl JTC
вымдное на
17 iOIii4H b
ilvKTOpa 3
и
0
оОида 7 A7
Lie. I- I1
Т ,)
положение б по отношению к дис {фиг Sj Интервал (фш 3) Знак отктонения температхры диска 2 - полож1иепььо й (Т 0, ) Знак .ния аГ/dt отклонения темрспат ры За счет управления OTKTOIK I ля тем пеоатуро на -ла Il,чи8aющas с TJ F i I иг 4) За счет хправпения каната OTI- ,o че ия градиента re -tpE-s ры нама i i вающая сила F-. (фиг 4} Рабочая точка двухтактно;о магнитного 1 а оди ч t i1
си
те 1Я
ХОДНОС НаПрг Н сНЛ
lOГл ко а тора 3 в i с с; (фи I)
Ин ерват / г 1ф Знак отi ю V.HI я ,иска 2 - по южи 9 ) Зн dT/dt OTKioi tHH, Этот режим iO i io
1 И-/2
Интерва i гч - Знак отк OH6i HV гиска 2 - отрицс 0 ) 3 ч
ОТкпОГ1-НЦЯ
За с 4ет i прав с и я диен га те псрат (ju
i -О (фиг 4 Р нэго магч/тного LI тьем квадранте (cbl жение ii
командч на ыаноы ние б по отношенье
L О
i Л
лЛ1 С
5
i
т - ;
/
} Hi
1
(
0
5
Интернат /ч- /ь (фи1 э
Злак отктонсн1я диска 2 - отрицатепы 0 ТА-ТБ) Знак ш и dr/a/ отктонения тс и За счет правления каната перат ры намагниш ьаю „ (фиг 4) За счет упоазтеыч к нения градиента тем вающая си ia F 0 (Фиг 4} условий настройки цепе 4pij нитною усипигетя F |Г ческих значении намагничивающих си i (F i 0 F 0) рабочая точка v хтакт ного магнитного сититетя я в iup вом квадранте (фиг 4) inoe iu пря жение (/i 0 и блок 17 ioinxi выдас командч на установк чнллчтора в потоже ние а по отношению к щск (фиг 1)
Интервал /t (фиг }
t
ч К
if i
К 1
iai акт и
Ji
Знак отклонения температуры обода и диска 2 - положительный (Т/ -76 ТА TS ). Знак изменения градиента dT/dt отклонения температуры dT/dt(). Этот режим полностью аналогичен интервалу 0-1.
Интервал d-/« (фиг. 3).
Знак отклонения температуры обода и диска 2 - положительный (Тл - ТЕ ТА ТБ ). Знак изменения градиента dT/dt отклонения температуры dT/dt Q. Этот режим полностью аналогичен интервалу / - /чИнтервал (фиг. 3).
Знак отклонения температуры обода и диска 2 - положительный (7д -ТЕ ). Знак изменения градиента dT/dt отклонения температуры d7YdЈ 0. Этот режим полностью аналогичен интервалу t - /2.
Интервал
/ч- /ID (фиг. 3). Знак отклонения температуры обода и диска 2 отрицательный (ТА -Ts ). Знак изменения градиента dT/dt отклонения температуры dT/dK.0. Этот режим полностью аналогичен интервалу /I-/;,.
Интервал /in.
Знак отклонения температуры обода и диска 2 - отрицательный (ТЛ -7 ТА /Ј ). Знак изменения градиента dT/dt отклонения температуры dT/dt 0. За счет управ,чения канала отклонения температуры намагничивающая сила /чир (фиг. 4). За счет управления канала отклонения градиента температуры намагничивающая сила рч,,,,() (фиг. 4). Рабочая точка двухтактного магнитного усилителя находится в третьем квадранте (фиг. 4), выходное напряжение (y.,,j. о. ), и блок 17 логики выдает команду на установку индуктора в положение б по отношению к диску (фиг. 1).
Если отклонение температуры обода и диска равно нулю, изменение градиента dT/dt отклонения температуры также равно пулю, то намагничивающие силы обоих кэ- налок /Аир - Ли;. 0 (фиг. 4). В этом случае рабочая точка двухтактного магнитного усилителя находится в точке 0 начала координат, а индуктор располагается параллельно по отношению к диску 2.
Применение предлагаемого упройства обеспечивает повышение точности поддержания заданного распределения температуры диска, сокращение сроков испытаний
дисков и снижение ведении испытаний.
12 энергозатрат
при про0
5
0
5
Формула изобретения
Устройство управления термоциклическими испытаниями дисков турбоагрегатов на разгонных стендах, содержащее привод вращения диска, индуктор, подключенный к источнику питания, вход которого подключен к выходу первого блока управления, первый исполнительный механизм, первый и второй датчики температуры, первый сумматор, первый вход которого подключен к первому датчику температуры, а второй - к первому выходу программного задатчика, отличающееся тем, что, с целью повышения точности, оно дополнительно содержит последовательно соединенные второй сумматор, первый ключ, второй блок управления и второй ключ, последовательно соединенные первый блок формирования производной, третий сумматор и блок логики, мостедова- тельно соединенные третий ключ и второй исполнительный механизм, второй блок формирования производной, четвертый сумматор, четвертый, пятый, шестой, седьмой и восьмой ключи и источник, постоянного напряжения, первый выход программного зада гчика подключен к входам второго блока формирования производной и четвертого сумматора, выходы которых подключены к
0 вторым входам соответственно третьего сумматора и блока логики, второй выход программного задатчика подключен к входу первого блока формирования производной и первому входу второго сумматора, второй вход которого подключен к второму датчику
с температуры, выход второго ключа подключен к первому входу первого исполнителз- ного механизма, выход источника постоянного напряжения через седьмой и восьмой ключи подключены к вторым входам первого и второго исполнительных механизмов,соответственно, выход первого сумматора через шестой ключ подключен к второму входу второго блока управления, а через четвертый ключ - к входу первого блока управления и первому входу пятого ключа, выход которого подключен к первом входу первого ключа, выход блока логики подключен к вторым входам первого, второго, третьего, четвертого, пятого, шестого, седьмого и восьмого ключей.
0
5
Фиг 

| название | год | авторы | номер документа |
|---|---|---|---|
| АНАЛОГО-ДИСКРЕТНАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 1966 |
|
SU216082A1 |
| Устройство для включения синхронных генераторов на параллельную работу | 1960 |
|
SU137162A1 |
| Стенд для термоциклических и разгонных испытаний дисков турбоагрегатов | 1987 |
|
SU1456814A1 |
| СПОСОБ ИЗМЕРЕНИЯ РЕАКТИВНОЙ МОЩНОСТИ В ТРЕХФАЗНОЙ СИММЕТРИЧНОЙ ЭЛЕКТРИЧЕСКОЙ ЦЕПИ | 2016 |
|
RU2629907C1 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩИХ МОМЕНТОВ НА КОСМИЧЕСКИЙ АППАРАТ С СИЛОВЫМИ ГИРОСКОПАМИ И ПОВОРОТНЫМИ СОЛНЕЧНЫМИ БАТАРЕЯМИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2196710C2 |
| Устройство для автоматического регулирования температуры заготовки при непрерывно-последовательном индукционном нагреве | 1981 |
|
SU1023672A1 |
| СПОСОБ ИЗМЕРЕНИЯ АКТИВНОЙ МОЩНОСТИ В ТРЕХФАЗНОЙ СИММЕТРИЧНОЙ СЕТИ | 2018 |
|
RU2689994C1 |
| Усилительное устройство | 1976 |
|
SU600694A1 |
| Устройство для включения генераторов на параллельную работу | 1960 |
|
SU136442A1 |
| Электропривод моталки проволочного стана горячей прокатки | 1973 |
|
SU507382A1 |
Изобретение относится к турбонасосостроению, а именно к устройствам управления испытательными стендами, а также может быть использовано в машиностроительной и других отраслях промышленности, применяющих градиентный индукционный нагрев. Для реализации программы изменения температуры обода и ступицы диска сигналы с программного задатчика 10 воздействуют на первый и второй блоки 15 и 20 формирования производной сигнала задания и одновременно поступают на входы четвертого, второго и первого сумматоров 21,11 и 9. Сигналы с выходов первого и второго блоков 15 и 20 формирования производной воздействуют на третий сумматор 16. С выхода четвертого сумматора 21 разность сигналов поступает на второй вход блока 17 логики, а с выхода третьего сумматора 16 разность сигналов поступает на первый вход блока 17 логики, выходной сигнал которого воздействует на управляющие входы первого, второго, третьего, четвертого, пятого, шестого, седьмого и восьмого ключей 12,14,18,22,23,24,25 и 26 таким образом, что на первый и второй исполнительные механизмы 6 и 19 подаются или сигнал от источника 27 постоянного напряжения, или сигнал второго блока управления, выходной сигнал которого формируется по сигналам от первого и второго датчиков 7 и 8 температуры /соответственно обода и ступицы диска 2/, в результате чего индуктор 3 меняет свое положение изменяя расстояние до обода и ступицы диска и обеспечивая их разный нагрев. Первый блок 5 управления формирует сигнал, который воздействует на регулируемый источник 4 питания таким образом, чтобы поддерживать температуру обода диска 2 на заданном по программе уровне. Такое выполнение устройства обеспечивает повышение точности поддержания заданного распределения температуры диска, сокращение времени испытания дисков и, как следствие, свижение энергозатрат при проведении испытаний. 4 ил.
ifL36
ji : 1
.35 40 , Ц 35 .34 ч 1-й аднотактныи 2-й омотактныи
50 магнитный усилитель
-ИЗ
55
- ti
49
43
Фиг. 2
1 И Lf Тл{
WV2
5
ф 3L ДО
-ИЗ
51 «:
SZ. 2Г
56
ЩЫ/БЛМ
W
МУ2.
| Стенд для термоциклических и разгонных испытаний дисков турбоагрегатов | 1986 |
|
SU1362240A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
