Изобретение относится к системам автоматического управления и может быть использовано для управления объектами в химической и других отраслях промьшленности.
Цель изобретения - повышение точности системы в условиях нестационарного объекта управления и высокого уровня действующих на него возмущений.
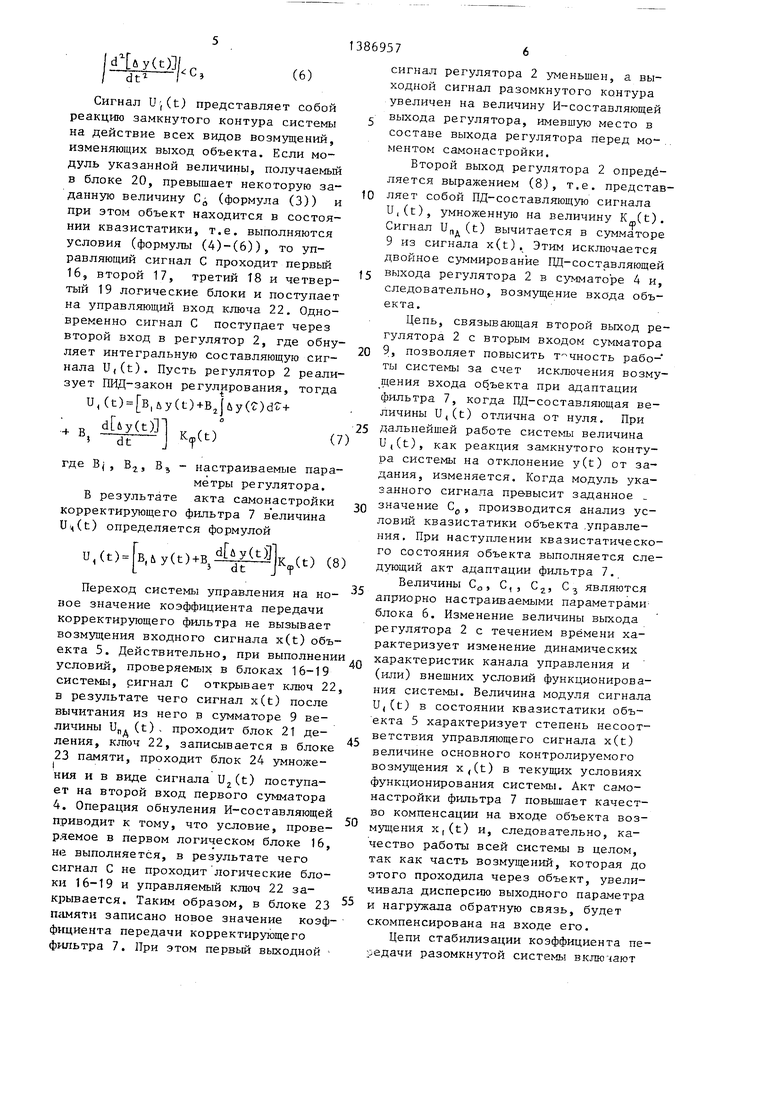
На фиг. 1 представлена блок-схема предлагаемой самонастраивающейся системы комбинированного регулирования на фиг. 2 - структурная схема системы- на фиг. 3 - блок-схема реализации логических блоков системы на фиг. 4 - принципиальная схема пневматического Ш-регулятора; на фиг.5 электрическая схема ПИД-регулятора.
Система включает измеритель 1 рассогласования, регулятор 2, блок 3 ум- ше, Меньше - кнопки выбора знака
0
5
0
UjCt) - выходной сигнал разомкнутого контура; x,(t) - основное контролируемое возмущение , x(t ) -вход объекта по каналу управления y(t) - выход объекта управления} ) - выходной сигнал блока памяти; ) - выходной сигнал третьего блока ления модуляi b.y,(t) - выходной сигнал первого блока выделения модуля , byj,(t.) - выходной сигнал второго блока выделения модуля; uy,(t) - выходной сигнал четвертого блока выделения модуля; Р - сигнал, пропорциональный текущему значению регулируемого параметра; РК командный сигнал,- ДД - регулируемый дроссель ди - регулируемый дроссель , Pgtix - выходной сигнал регулятораJ П - внешний переключатель рода работы; Р, А - режимы работы регулятора Ручное, Автомат,Боль

| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| КАСКАДНАЯ ДВУХКАНАЛЬНАЯ САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО УПРАВЛЕНИЯ | 2006 |
|
RU2327196C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2016 |
|
RU2616219C1 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Адаптивная система автоматического управления | 1987 |
|
SU1441351A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |


Изобретение относится к области систем автоматического управления и может быть использовано для управления объектами в химической и других отраслях промьшшенности.Цель изобретения - повышение точности системы в условиях нестационарного по статической характеристике объекта управления и высокого уровня действующих на него возмущений значительной интенсивности. Система содержит измеритель 1 рассогласования, регулятор 2, блоки 3 и 24 умножения,сумматоры 4 и 9, объект 5 управления, блок 6 самонастройки, корректирующий фильтр 7, датчик 8 внешнего возмущения. Система построена на основе комбинированного принципа и включает разомкнутый и замкнутый контуры регулирования, блок самонастройки разомкнутого контура и цепь стабилизации коэффициента передачи разомкнутой системы. Разомкнутый контур,включающий блоки 8, 7, 4 и 5, предназначен для компенсации контролируемых возмущений. Блок 6 самонастройки по- вьшгает качество работы разомкнутого контура в условиях нестационарности статической характеристики объекта. Цепь стабилизации коэффициента передачи разомкнутой системы, включающая блоки 8, 9, 7, 3 и 24, повьш1ает качество работы замкнутого контура регулирования при неизменных настройках регулятора и управления нестационарным по статической характеристике объектом. 5 ил. Sfi (Л с со 00 О5 со СП 
ножения, сумматор 4, объект 5 управления, блок 6 самонастройки, корректирующий фильтр 7, датчик 8 внешнего возмущения, сумматор 9, блок 10 умножения, блок 11 вьщеления модуля, блок 12 дифференцирования, блок 13 выделения модуля, блок 14 дифференцирования, блок 15 выделения модуля, логические блоки 17-19, блок 20 выделения модуля, блок 21 деления, управляемый ключ 22, блок 23 памяти и блок 24 умножения.
Блок-схема реализации логических блоков системы включает компаратор 25, управляемый ключ 26, компаратор 27, управляемый ключ 28, компаратор 29, управляемый ключ 30, компаратор 31 и управляемый ключ 32.
Принципиальная схема пневматического пи-регулятора включает элемент 33 сравнения, дроссельный сумматор 34, элемент 35 сравнения, усилитель 36 мощности, элемент 37 сравнения, емкость 38, запорный клапан 39 и отключающее реле 40,
На фиг. 1-5 приняты следующие обозначения: g(t) - задающее воздействие; (t) - отклонение выходного сигнала объекта от задания; С - управляющий сигнал; Cj, - задание для первого логического блокад С, - задание для второго логического блока Cj - задание для третьего логического блока-, С 5 - задание для четвертого логического блока; U,(t) - выход второго блока умножения; Ur,д(t) - выходной сигнал третьего блока yj.i:-:o
приращения выходного сигнала в режиме ручного управления; U - напряжение внутреннего источника питания; Р( J 2. РЭ обмотки и контакты реле; Rp, Ср - резистор и конденсатор интегратора ручного управления-, +Ug;, -UM - опорные напряженияJ МКД - модуль компенсации дрейфа-, Д ( - двух- анодный стабилитрон; А,-А - операционные интегральные усилители; Ru - высокоомный переменный резистор интегратора; Сц - конденсатор интегратора; иц - выходной сигнал интегратора (И-составляющая) ; К - общий коэффициент пропорциональности регулято-,
оа; и
пид
- суммарный сигнал П. И. Д
составляющих закона регулирования; Rffls Сф - резистор и емкость апериог дического звена (фильтра); U - сигнал-ограничитель выхода регулятора}
и
огр
- выходной сигнал ограничителя;
-и,
5
0
5
Д, Д, - диоды; -и„4 , -и 64 - сигналы ограничения выхода интегратора ручного управления на нижнем и верхнем уровнях; - сигнал рассогласования заданного и текущего значений параметра} К, - электронный аналоговый ключ.
I
Замкнутый контур регулирования
содержит последовательно соединенные блоки 1-5, охваченные отрицательной обратной связью.
Разомкнутый контур регулирования включает последовательно соединенные блоки 8, 7, 4 и 5. Управляющими сиг- налам1И замкнутого и разомкнутого контуров являются соответственно сигна31
лы Vt(t) и ) . Блок самонастройки разомкнутого контура содержит бло ки 11-20. Цепи стабилизации козффи- циента передачи разомкнутой системы включают блоки 8, 9, 7, 3 и 24.
Система решает задачу управления нестационарным объектом, который в общем виде можно описать уравнением
|:a.)+y(t)K,(t)
+ djt) f,(t),
де а ;,K(t),dp(t) - параметры объек
та управленияj y(t) - регулируемая
величина;
x(t) - входной сигнал объекта (управляющее воздействие);
XI(t) - основное внешнее контролируемое возмущение (возмущение по нагрузке)j
f(t) - внешнее неконтролируемое возмущение.
Рассматриваются нестационарные бъекты следующего вида
К,„. d
waicc
(2)
Уравнения (1) и (2) описывают движение объектов, нестационарных по статистической характеристике. Задача управления заключается в сведении до заданной величины ошибки регулирования
iy(t) g(t)-y(t)
|by(t)S,
где о, - некоторая заданная положительная величина.
Система работает следующим образом.
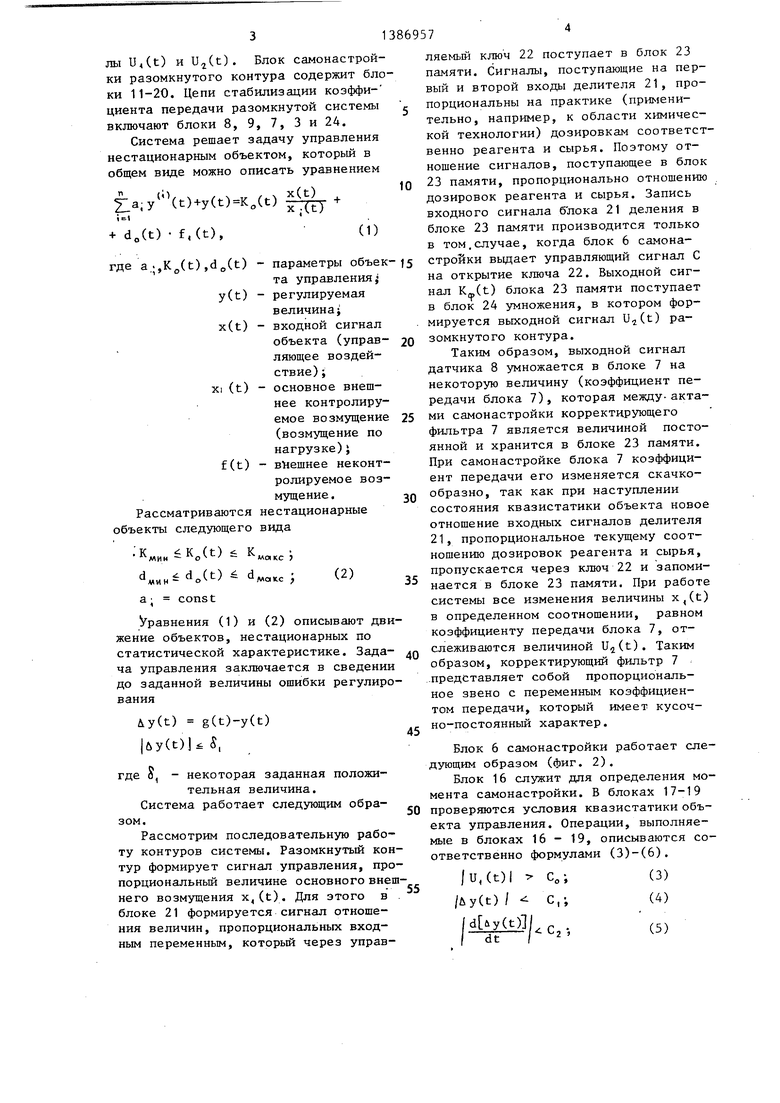
Рассмотрим последовательную работу контуров системы. Разомкнутый контур формирует сигнал управления, про- порциональньш величине основного внешнего возмущения х,(t). Для этого в . блоке 21 формируется сигнал отношения величин, пропорциональных входным переменньп, который через управ
386957
ляемый ключ 22 поступает в блок 23 памяти. Сигналы, поступающие на первый и второй входы делителя 21, порциональны на практике (применительно, например, к области химической технологии) дозировкам соответственно реагента и сырья. Поэтому отношение сигналов, поступающее в блок
1Q 23 памяти, пропорционально отношению дозировок реагента и сырья. Запись входного сигнала блока 21 деления в блоке 23 памяти производится только в том.случае, когда блок 6 самона- -J5 стройки вьщает управляющий сигнал С на открытие ключа 22. Выходной сигнал K|j,(t) блока 23 памяти поступает в блок 24 умножения, в котором фор- . мируется выходной сигнал U,(t) ра20 зомкнутого контура.
Таким образом, выходной сигнал датчика 8 умножается в блоке 7 на некоторую величину (коэффициент передачи блока 7), которая между-акта25 ми самонастройки корректирующего
фильтра 7 является величиной постоянной и хранится в блоке 23 памяти. При самонастройке блока 7 коэффициент передачи его изменяется скачко3Q образно, так как при наступлении
состояния квазистатики объекта новое отношение входных сигналов делителя 21, пропорциональное текущему соотношению дозировок реагента и сырья, пропускается через ключ 22 и запоми нается в блоке 23 памяти. При работе системы все изменения величины x,(t) в определенном соотношении, равном коэффициенту передачи блока 7, отслеживаются величиной U2(t). Таким образом, корректирующий фильтр 7 представляет собой пропорциональное звено с переменным коэффициентом передачи, который имеет кусоч40
45
но-постоянныи характер.
Блок 6 самонастройки работает следующим образом (фиг. 2).
Блок 16 служит для определения момента самонастройки. В блоках 17-19 проверяются условия квазистатики объекта управления. Операции, выполняемые в блоках 16 - 19, описываются соответственно формулами (3)-(6).
|U,(t)| /&y(t) /
s
(3) (4)
(5)
dt
.c,
(6)
Сигнал U , (t) представляет собой реакцию замкнутого контура системы на действие всех видов возмущений, изменяющих выход объекта. Если модуль указанной величины, получаемый в блоке 20, превышает некоторую заданную величину GO (формула (3)) и при этом объект находится в состоянии квазистатики, т.е. выполняются условия (формулы (4)-(6)), то управляющий сигнал С проходит первый 16, второй 17, третий Т8 и четвертый 19 логические блоки и поступает на управляющий вход ключа 22. Одновременно сигнал С поступает через второй вход в регулятор 2, где обнуляет интегральную составляющую сигнала U,(t). Пусть регулятор 2 реализует ПИД-закон регулирования, тогда
и, (t) B,uy(t)+B,,|uy(e) (t)1
+ В,
где В(,
dt В
J
K(t)
г
БЗ настраиваемые параметры регулятора. В результате акта самонастройки корректирующего фильтра 7 величина U(t) определяется формулой
U,(t) B,y(t)+B,fAlltj K(t) (8)
Переход системы управления на новое значение коэффициента передачи корректирующего фильтра не вызывает возмущения входного сигнала x(t) объекта 5. Действительно, при выполнении условий, проверяемых в блоках 16-19 системы, сигнал С открывает ключ 22, в результате чего сигнал x(t) после вычитания из него в сумматоре 9 величины и„д (t), проходит блок 21 деления, ключ 22, записывается в блоке 23 памяти, проходит блок 24 умножения и в виде сигнала U(t) поступает на второй вход первого сумматора 4. Операция обнуления И-составляющей приводит к тому, что условие, проверяемое в первом логическом блоке 16, не выполняется, в результате чего С 1:гнал С не проходит логические блоки 16-19 и управляемый ключ 22 закрывается. Таким образом, в блоке 23 Пс1мяти записано новое значение коэффициента передачи корректирующего фильтра 7. При этом первый выходной
сигнал регулятора 2 уменьшен, а выходной сигнал разомкнутого контура увеличен на величину И-составляющей с выхода регулятора, имевшую место в составе выхода регулятора перед мо-.. ментом самонастройки.
Второй выход регулятора 2 определяется выражением (8), т.е. представ10 ляет собой ПД-составляющую сигнала U,(t), умноженную на величину К (с). Сигнал (t) вычитается в сумматоре 9 из сигнала x(t). Этим исключается двойное суммирование ПД-составляющей
15 выхода регулятора 2 в сумматоре 4 и, следовательно, возмущение входа объекта.
Цепь, связывающая второй выход регулятора 2 с вторым входом сумматора
20 9, позволяет повысить Т чность рабо- ты системы за счет исключения возмущения входа объекта при адаптации фильтра 7, когда ПД-составляющая величины U,(t) отлична от нуля. При
25 дальнейшей работе системы величина (7) U,(t), как реакция замкнутого контура системы на отклонение y(t) от задания, изменяется. Когда модуль указанного сигнала пр&высит заданное
Q значение С, производится анализ условий квазистатики объекта .управления. При наступлении квазистатического состояния объекта выполняется следующий акт адаптации фильтра 7.
Величины Со, С,, С, С являются априорно настраиваемыми параметрами блока 6. Изменение величины выхода регулятора 2 с течением времени характеризует изменение динамических характеристик канала управления и (или) внешних условий функционирования системы. Величина модуля сигнала и,(t) в состоянии квазистатики объекта 5 характеризует степень несоответствия управляющего сигнала х(с) величине основного контролируемого возмущения x,(t) в текущих условиях функционирования системы. Акт самонастройки фильтра 7 повьш1ает качество компенсации на входе объекта возмущения X|(t) и, следовательно, качество работы всей системы в целом, так как часть возмущений, которая до этого проходила через объект, увеличивала дисперсию выходного параметра
55 и нагружала обратную связь, будет скомпенсирована на входе его.
Цепи стабилизации коэффициента передачи разомкнутой системы включают
35
40
45
50
71
блоки 8, 9, 21-24 и 3 и соответствующие им связи. Задача стабилизации коэффициента передачи разомкнутой системы рассматривается как часть задачи, сформулированной вьше (формулы (1) и (2)). Пусть ) - статистическая характеристика объекта 5 управления (нестационарный коэффициент передачи), Кр коэффициент передачи регулятора 2, Kpc(t) -коэффициент передачи разомкнутой системы Блок 3 умножения представим в виде усилителя, переменный коэффициент усиления которого заменяет второй входной сигнал блока 3. Задача стабилизации Kp(t) может быть сформулирована
К/мим - KMCTK.C }
Kpg,. const,
К
К,6 Kp(t) К.
pc(t) Kp,,-K(t)-K,(t),
Требуется обеспечить , , где К , - предельные значения величины (t), Ю, , К - пре,- дельные значения величины Kpc(t)j 0 - некоторое заданное положительное число.
-Цепи самонастройки величины K. использованные в составе системы, позволяют решить указанную задачу.
Пусть t; . (,2,...,п) - моменты квазистатики обьекта управления. Дл момента t;
KpK(t;)K,,(t;).K(t,-),
где Kp|(t;)-- коэффициент передачи разомкнутого контура системы. Для момента t,
K(t.4, )K,(t;).e.;
где Г, - некоторая величина. Тогда
Kp,(t;,,)K, (t;).C,-K(t,4, ).
В результате самонастройки коэффициента передачи фильтра 7 в момен
,4,
1
т.е. в пределах некоторой допустимой погрешности, система посредством блока 6 обеспечивает постоянство коэф-
869578
фициента передачи разомкнутого контура.
Следовательно, 5 Kpjtu, ) Kp,(t;).
Для разомкнутой системы в момент tj (при отсутствии блока 3)
Kpc(t;)Kp,,. K(t,) Для момента t;; Kp(t;.. )Kp.K;(t;),e,
Из сравнения последних двух выражений, с учетом вышеприведенного выра- жения для K.,(t,-., ) следует, что для стабилизации величины K(t) достаточно умножить ее на величину K(p(t). После введения в систему блока 3 (фиг. 2) можно записать для момента
20
Kpjt;) Kp,,-K(t;)-K,,()
где (t;i.), для момента t,vi (в пределах -допустимой погрешности самонастройки)
Kpc(4.,)-K;,,.K()r,
т.е. Крс (t,4, ) (i: Kp(t;). Таким образом, использование ука- занных цепей самонастройки позволяет решить сформулированную выше задачу стабилизации величины Kpc(t).
Третий блок 24 умножения (фиг.2) предназначен для обеспечения равенства ПД-составляющих выходного сигнала регулятора при взаимной компенсации их в cy мaтope 9.
Формула изобретения
Самонастраивающаяся система ком- . бинированного регулирования, содержащая измеритель рассогласования,первый вход которого подключен к входу системы, регулятор, первый и второй сумматоры, объект управления, блок самонастройки, датчик внешнего возмущения, блок деления, управляемый ключ, блок памяти, первый и второй
блоки умножения, причем выход второго блока умножения подключен к первому входу первого сумматора, выход которого соединен с первым входом второго сумматора, подключенного выходом к входу делимого блока деления, выход которого соединен с информационным входом управляемого ключа,подключенного выходом через блок памяти к первому входу второго блока умножения, второй вход которого соединен с входом делителя блока деления и с выходом датчика внешнего возмущения, выход объекта управления соединен с выходом системы и с вторым входом измерителя рассогласования, подключенного выходом К первому входу блока самонастройки и к информационному входу регулятора, управляющий вход которого соединен с управляющим входом управляемого ключа и с выходом блока самонастройки, о т л и - чающаяся тем, что, с целью повышения точности системы в условиях нестационарного объекта управления при высоком уровне действующих на него возмущений, в нее дополнительно введен третий блок умножения, подключенный выходом к второму входу второго сумматора, первый вход второго блока умножения соединен с первыми входами первого и третьего блоков умножения, вторые входы которых подключены соответственно к первому и второму выходам регулятора, выход первого блока умножения подключен к второму в ходу блока самонастройки и к второму входу rtepBo- го сумматора, подключенного выходом к входу объекта управления.
О
Внешние цепи
Фиг.5
| Ав орское свидетельство СССР по заявке № 3850232/24-24, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР по заявке № 4053276/24-24, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
