Изобретение относится к системам автоматического управле}шя и может быть использовано для управления участками: производства, характери- зугопщмися наличием промежуточной емкости между участкамиJ наличием транспортных запаздываний в участках, возможностью движения материальных потоков напрямую от первого участ- ка к второму, либо через промежуточную емкость, наличием неконтролируемых возмущающих воздействий.
Примером такого рода объектов служат цехи металлургического произ- водства со складскими помещениями (емкостями) для полуфабрикатов, в частности,стальные слит1Ш из стале- плавильньЕс цехов могут направляться непосредственно в прокатные цехи или через склад холодных слитков.
Цель изобрете1-шя - повышение точности системы.
На чертеже представлена блок-схема предлагаемой системы управления участ ками производства.
На чертеже обозначены W,(t) и W2(t)-неконтролируемые возмущения, действующие на первый и второй участки в момент времени t Q(t) - вход- ное (материальное или энергетическое) воздействие на систему (объект) уп- равления Y(t) - выход объекта управ- ле ния,
Система управления участками про- изводства содержит объект 1 управления, включающий первый исполнительный блок 2, первый участок 3, первый г транспортер 4, второй исполнительпьй блок 5, сумматор 6, второй участок 7,, второй транспортер 8, промежуточную емкость 9, третий исполнительньм блок 10, пятый 11, четвертый 12, третий 13, второй 14 и первый 15 датчик ки, четвертьш сумматор 16, второй блок 17 задержки, первый сумматор 18, обратную модель 19 второго участка, второй фильтр 20 (низкой частоты), первый блок 21 сравнения, второй зкстранолятор 22 задатчик 23, компаратор 24, третий блок 25 сравнения, первый регулирующий блок 26, второй ключ 27, второй регулирующий блок 28, первый ключ 295 блок 30 вычитания, первый блок 31 задержки, второй блок
32 сравнения 5. третий 6j50K 33 задерж ки, пятый сумматор 34, первую обратную модель 35 первого участка, цнте- гратор 36, )торую обратную модель
, , д
-15 20
зо
, ,/ .г , , ,
50
55
37первого участка, третий фильтр
38(низкой частоты), блок 39 экстра- поляторов, включающий 39-1,...,39-j, ..., 39-N экстраполяторов, первый фильтр АО (низкой частоты), первый экстраполятор 41, блок 42 элементов задержки, включагаций N элементов задержки, блок 43 элементов сравнения, включающий N элементов сравнения, второй сумматор 44, третий регулирующий блок 45, третий сумматор 46.
Объект 1 управления представлен, например,участками агломерационного производства металлургического пред- . приятия. Q(t) - поток шихтовых материалов, первый 2 и третий 10 исполнительные блоки - весовые дозаторы непрерывного действия, второй исполнительный блок 5 - челноковый транс-, портер с перекидным шибером, транспортеры 4 и В для сьтучих материалов, первый 3 и второй 7 участки могут быть представлены в виде инерционного звена первого порядка, промежуточная емкость 9 - интегральным звеном, первый 15, второй 14, третий 13, четвертый 12 и пятый 11 датчики - ленточные массоизмерители. Обратные модели 19,35 и 37 участков могут быть представлены в виде пропорционально- дифференцирукщих звеньев; первьй ре гулирующий блок 26 с П-Законом регулирования, второй регулирующий блок 28 с пи-законом регулирования.
Система управления участками производства работает следукнщм образом.
Вьрсодная переменная объекта 1 управления измеряется первым датчиком 15, и полученный сигнал Y(t) вычитается в первом блоке 21 сравнения из сигнала Y(t) о заданном значении выходной переменной, поступающего с за- датчика 23. Во втором фильтре 20 низкой частоты подавляются .высокочастотные составляющие сигнала Sy(t) Y(t)-Y(t), и полученный сигнал Sy(t) преобразуется в обратной модели 19 второго участка в сигнал запаздывающей корректировки «Уи управляющего воздействия второго участка. Для определения реализованного управляющего воздействия U второго участг ка выходная величина второго исполнительного блока 5 измеряется третьим датчиком 13, а выходная величина третьего исполнительного блока 10 - вторым датчиком 14, выходные сигналы этих датчиков суммируются в четвер3139
том сумматоре 16. Сигнал U(t) о найденном в текущий момент времени управ ляющем воздействии задерживается во втором блоке 17 задержки на время Г запаздывания во втором транспортере 8 и алгебраически суммируется в первом сумматоре 18 с выходным сигналом обратной модели 19 второго участка. На выходе первого сумматора 18 получается сигнал ) о восстановленном с запаздыванием на время Tj образцовом управляющем воздействии второго участка
результате чего устанавливается равенство и, (c)Q2(t) и на второй участок поступает требуемое количество материала.
Если же U(t) Q(t), т.е. количества материала, поступающего на второй исполнительный блок 5, недостаточно для выполнения равенства QjCt) ), то компаратор 24 вырабатывает сигнал, при котором ключ 29 размыкается и второй регулирующий блок 28 подает на вход второго . исполнительного блока 5 команду,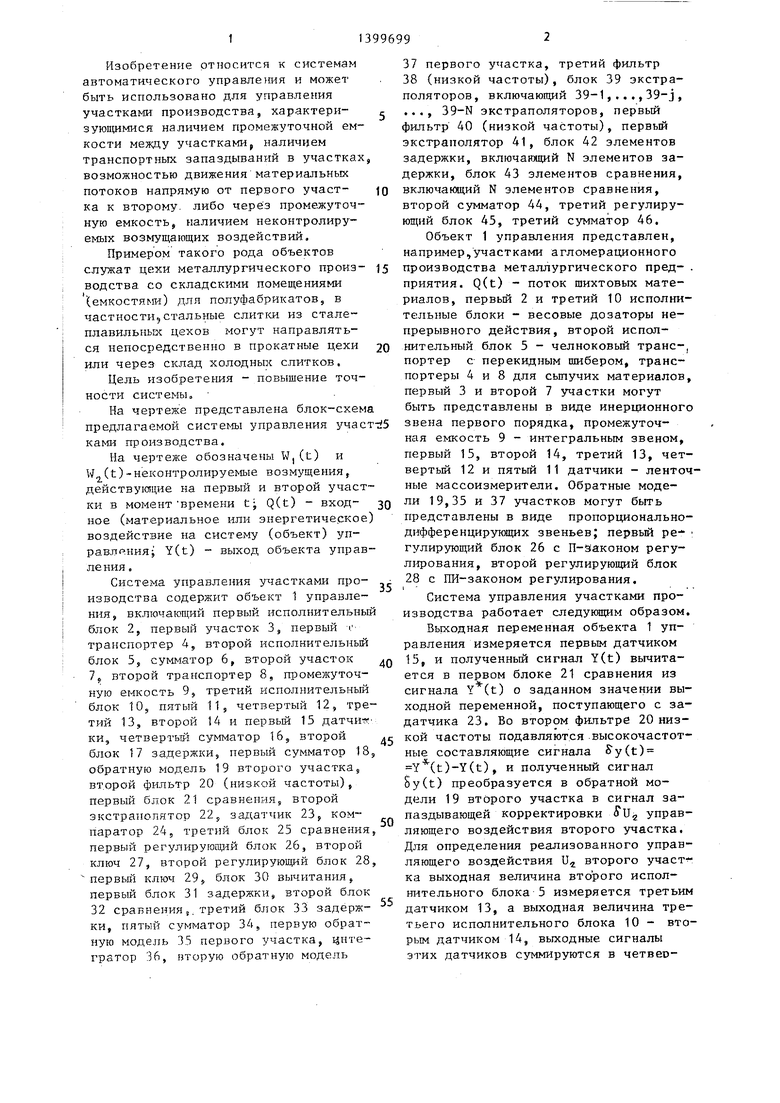


| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| Система управления объектом с избыточным числом управляющих воздействий, например, дуговой электропечью | 1987 |
|
SU1476432A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
| Устройство для согласования производительности технологических участков | 1982 |
|
SU1100607A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1994 |
|
RU2128358C1 |
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |
| Система регулирования | 1985 |
|
SU1298711A1 |
| Устройство для компенсации запаздываний | 1986 |
|
SU1409966A1 |
| Система регулирования для объектов с запаздыванием | 1985 |
|
SU1295365A1 |
Изобретение относится к систе- мам автоматического управления и может быть использовано для управления участками производства. Цель изобретения - повышение точности системь. Система содержит объект управления исполнительные блоки, участки,транспортеры, сумматоры, промежуточную емкость, датчики,блоки задержки,обратную модель второго участка,фильтры, блоки сравнения, экстраполято- . ры, задатчик, Компаратор, регулирующие блоки, ключи, блок вычитания, обратные модели первого участка, интегратор, блок экстраполяторов, блок элементов задержки, блок элементов сравнения. Система позволяет обеспе чить инвариантность управляемой координаты от неконтролируемых внешних воздействий .при управлении участками производства, в. которых наблкда- ются транспортные запаздывания между которыми имеется промежуточная емкость и возможно движение материальных по- токов от одного участка к другому. S 1 з.п. ф-лы, 1 ил. (Л
.. с- -II r - rr; Гя,, f 15 при которой выполняется равенство U,(t-oJ-U(t)(t)J, (1) Q(t)Qjt), т.е. весь материал подагдeCf J - оператор обратной модели 19 второго участка. Сигнал о UjCt-fTg) экстраполируется на время Г во втором экстраполяторе 22,и в результате 20 на его выходе получается сигнал ) о требуемом управляющем воздействии второго участка.
Сигнал v (t) о требуемом управляющем воздействии второго участка25 исполнительным блоком 10. В результа- поступает на компаратор 24, где срав- те из промежуточной емкости 9 третьим нивается с сигналом четвертого дат-исполнительным блоком 10 подается на чика 12 о величине материального пото- второй участок 7 через сумматор 6 ка Q(t) перед исполнительным блокомнедостающее количество материала.
30 Для выработки управляющего воздействия и,(с) на первый участок 3 сначается вторым исполнительным блоком 5 на второй участок, В это время второй ключ 27 замыкается и сигнал ) о недостающем количестве материала с выхода третьего блока 25 сравнения подается на вход первого регулирующего блока 26, которьй вырабатывает сигнал, управлянщий третьим
ла восстанавливается .с запаздыванием Г, в первом транспортере 4 образцовое управляющее воздействие U, (t-r, ) первторой ключ 27 (за;мыкающий) - в разомкнутом состоянии. При разомкнутом втором ключе 27 первый регулирующий блок 26 с пропорциональным законом регулирова1шя вьфабатывает нулевой сигнал, при котором третий исполнительный блок 10 (дозатор) остановлен и не подает материал из промежуточной емко сти 9 на второй участок 6. В третьем блоке 25 сравнения из сигйала U(t) вычитается сигнал ((t) с выхода третьего датчика 13 о величине материального потока , поступающего с второго исполнительного блока 5 на второй участок. При замкнутом первом ключе 29 сигнал ) -U(t)-Q(2) с выхода третьего блока 25 сравнения подается на второй регулирующий блок 28 .с пропорциональ- но-интегральным законом регулирования, которым вырабатывается сигнал второму исполнительному блоку 5, в
запасов в промежуточной емкости 9, С этом целью выходной сигнал Q(t) четвертого Датчика 12 задерживается в .: .
0 первом блоке 31 задержки на время с и вычитается во втором блоке 32 сравнения из выходного сигнала U2(t) чет вертого сумматора 16. Сигнал о полученной разности QiCt) преобразует 45 СИ в первой обратной модели 35 первого участка в сигнал о запаздьшаю- щей корректировке S U, управлякядего воздействия первого участка 3. и алгебраически суммируется в пятом сумма50 торе 34 с задержанным в третьем блоке 33 задержки на время запаздьшания 2 в первом транспортере 4.выходным сигналом пятого датчика 11. На выходе пятого сумматора 34 получается
55 сигнал о восстановленном с запаздыт ванием на время сГ, рбразцовом управляющем воздействии первого участка
U(t(-f,)U, (t-T:,)-fCf-; (l), (2)
при которой выполняется равенство Q(t)Qjt), т.е. весь материал пода исполнительным блоком 10. В результа- те из промежуточной емкости 9 третьим исполнительным блоком 10 подается на второй участок 7 через сумматор 6 недостающее количество материала.
ется вторым исполнительным блоком 5 на второй участок, В это время второй ключ 27 замыкается и сигнал ) о недостающем количестве материала с выхода третьего блока 25 сравнения подается на вход первого регулирующего блока 26, которьй вырабатывает сигнал, управлянщий третьим
д, участка 3 без учета количества материала, требуемого для поддержания
ла восстанавливается .с запаздыванием Г, в первом транспортере 4 образцовое управляющее воздействие U, (t-r, ) перд, участка 3 без учета количества материала, требуемого для поддержания
запасов в промежуточной емкости 9, С этом целью выходной сигнал Q(t) четвертого Датчика 12 задерживается в .: .
первом блоке 31 задержки на время с и вычитается во втором блоке 32 сравнения из выходного сигнала U2(t) чет вертого сумматора 16. Сигнал о полученной разности QiCt) преобразует СИ в первой обратной модели 35 первого участка в сигнал о запаздьшаю- щей корректировке S U, управлякядего воздействия первого участка 3. и алгебраически суммируется в пятом сумматоре 34 с задержанным в третьем блоке 33 задержки на время запаздьшания 2 в первом транспортере 4.выходным сигналом пятого датчика 11. На выходе пятого сумматора 34 получается
сигнал о восстановленном с запаздыт ванием на время сГ, рбразцовом управяющем воздействии первого участка
U(t(-f,)U, (t-T:,)-fCf-; (l), (2)
513996996
рде Ui(t- C.j) - управляюцее воздейст- элементов задержки А2-1,.. . ,42-j ,. ,. , 8ие первого участка; . - оператор 42-N,n сигналы о полученных разностях обратной модели первого участка.Сиг- алгебраически суммируются во втором
мал U(t- b.i) экстраполируется в пер- сумматоре 44. Выходной сигнал третье- вом экстраполяторе 41 на текущий мого сумматора 46 о значении управляющего воздействия первого участка 3 идет на третий регулирующий блок 45, который вырабатьшает сигнал, управля- 10 ющий первым исполнительньм блоком.
мент времени t и поступает на вход Третьего сумматора 46, где алгебраически суммируется с корректировка- Ми управляющего воздействия первого участка 3, предназначен ными для под- йержания запасов материала в промежуточной емкости 9. Эти Корректировки рассчитываются, во-первых, по раз- Вости между приходом и расходом ма- tepиaлa в промежуточную емкость 9 и, бо-вторьос, по количеству материала йа первом транспортере 4, предназначен його для заполнения промежуточной ем 1сости 9. ,
Для расчб та первой части корректировок в блоке 30 вычитания из суммы Сигналов четвертого 12 и второго 14 атчиков вычитается сигнал третьего Датчика 13 и таким образом определя- тся сигнал uQ I, о разности приход 1 расхода материала в промежуточную емкость 9. Этот сигнал интегрируется В интеграторе 36 и подается во втору обратную модель 37 первого участка, где преобразуется в сигнал части корректировки управляющего воздействия первого участка 3. С целью Определения другой части корректировки находятся разности между точ- 1ками траекторий фактического и тре- буемого количества материала на ин;тервале времени 47: , которые затем алгебраически суммируются. Для этого сигнал пятого датчика 11 усредняется на интервале времени йТ ,
-- в первом фильтре 40 низкой час- N
тоты и задерживается в блоке 42 эле- 5модели первого участка, интегратор, ментов задержки на время tTB (42- причем первьш выход объекта подклю- 1)-ом элементе задержки, на - вчен к второму входу первого блока (42-j)-oM элементе задержки, насравнения, выход второго фильтра че- NutT t, в (42-N)-oM элементе задержки.рез обратную модель второго участка Выходной сигнал пятого сумматора 34 gQ также усредняется на интервале времени и в третьем фильтре 38 низкой частоты и экстраполируется на интервалы времени от 6 до Z, экстраполя- торами 39-1,..., 39-, ..., 39-N бло- входу компаратора, выход которого сока 39 экстраполяторов. В блоке 43единен с управляющими входами пер- злементов сравнения из выходных сигна-вого и второго ключей, выходы которых лов экстраполяторов 39-N,..., 39-j ,подключены к входам соответственно .... 39-1 вычитаются выходные сигналывторого и третьего регулирующих блосоединен с первым входом первого сумматора, подключенного выходом к входу второго экстраполятора, подключенного выходом к первому входу третьего блока сравнения и к первому
сумматоре 44. Выходной сигнал третье-
го сумматора 46 о значении управляющего воздействия первого участка 3 идет на третий регулирующий блок 45, который вырабатьшает сигнал, управля- ющий первым исполнительньм блоком.
Формула изобретения
матора соединен с выходом первого экстраполятора, отличаю щ а я- с я тем, что, с целью повышения точности системы, в нее введены пятый сумматор, второй и третий блоки задержки, обратная модель второго участ-, ка, компаратор, третий регулирующий блок, первый и второй ключи, блок вычитания, первая и вторая обратные
модели первого участка, интегратор, причем первьш выход объекта подклю- чен к второму входу первого блока сравнения, выход второго фильтра че- рез обратную модель второго участка входу компаратора, выход которого соединен с управляющими входами пер- вого и второго ключей, выходы которых подключены к входам соответственно второго и третьего регулирующих блосоединен с первым входом первого сумматора, подключенного выходом к входу второго экстраполятора, подключенного выходом к первому входу третьего блока сравнения и к первому
71
ков, подключенных выходами соотгзет- ственно к первому и второму входу объекта управления, второй выход которого соединен с первым входом четвертого сумматора, выход которого через второй блок задержки соединен ;с вторым входом первого сумматора, а непосредственно - с вторым входом второго блока сравнения, подключен- |Ного выходом через первую обратную модель первого участка к первому вхо ду пятого сумматора, второй вход которого подключен к выходу третьего блока задержки, вход которого соединен с пятым выходом объекта управления и с входом первого фильтра, подключенного выходом к входам блока элементов задержки, выход пятого сумматора подключен к входу первого экстраполятора и к входу третьего фильтра, выход которого соединен с входами блока экстраполяторов,. группа выходов которого подключена соответственно к второй группе входов блока элементов сравнения, выход второго сумматора подключен к первому входу третьего сумматора, подключенного выходом через третий - регулиру- ниций блок к третьему входу объекта управления, второй выход которого соединен с первым входом блока тания, подключенного выходом через последовательно соединенные интегратор и вторую обратную модель первого участка к третьему входу третьего сумматора, третий выход объекта управления соединен с вторым входом четвертого сумматора и с вторым входом третьего блока сравнени, под- ключенного выходом к входам первого и второго ключей и к второму входу блока вычитания, третий вход которого соединен с четвертым выходом объекта управления, с вторым входом компаратора и,с входом первого бло996998
задержки,, четвертый вход объекта управления является входом входного воздействия системы.
.2. Система по п. 1,отлича- ю щ а я с я тем, что объект управления содержит первый, второй и третий исполнительные блоки, первый и вто- рой участки, первый и второй транс д портеры, промежуточную емкость, первый, второй, третий, четвертый и пятый датчики и сумматор, причем четвертый вход объекта управления соединен с входом первого исполнительного
15 блока, подключенного управлякяцим входом к третьему входу объекта-управления, пятый выход которого соединен с выходом пятого датчика, вход которого подключен к вьгходу первого ис2Q полнительного блока и через последовательно соединенные первый участок и первый транспортер к входу второго исполнительного блока и к входу четвертого датчика, подключенного выхо25 дом к четвертому выходу объекта уп равления, третий выход которого соединен с выходом третьего датчика, подключенного входом к первому выходу второго исполнительного блока и к
30 первому входу сумматора, выход которого через последовательно соединенные второй участок, второй транспортер и первый датчик подключ ен к nep-i вому выходу объекта управления, второй вькод которого соединен с выхо- дом второго датчика, вход которого подключен к второму рходу сумматора и к выходу третьего исполнительного блока,, управляющий вход которого соединен с вторым входом объекта управления, первый вход которого подключен к управляющему входу второго исполнительного блока, второй вькод которого через промежуточную емкость соединен с входом третьего исполни-
35
40
45
тельного блока.
| Основы управления технологическими процессами | |||
| Под.ред | |||
| Н.С.Райб- мана | |||
| М.: Наука, 1978, с | |||
| Кран машиниста для автоматических тормозов с сжатым воздухом | 1921 |
|
SU194A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Регулятор | 1980 |
|
SU907511A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
