Изобретение относится к области электротехники и может быть использовано в робототехнических установках с программным управлением, включающих электропривод с шаговым двигателем, в частности, линейным или двухкоординатным, и требующих точного позиционирования исполнительного механизма.
Известен шаговый электродвигатель с колеблющимся ротором, состоящий из корпуса с многофазным статором с обмоткой, дискового ротора с шестерней, основного выходного вала с шестерней, дополнительного выходного вала, охватывающего основной, и пальца, жестко закрепленного на дополнительном валу и опирающегося на торцевую поверхность ротора (Авторское свидетельство СССР №1598066).
Недостатком представленного шагового электродвигателя является низкая частота переключений фаз электромагнитных катушек, выражающаяся в малом быстродействии, из-за большой массы подвижных частей, участвующих в волновом процессе, таких как дискового ротора с шестерней, основного выходного вала с шестерней, пальца.
Прототипом предлагаемого изобретения является торцевой волновой электродвигатель, содержащий корпус, в котором равномерно по окружности установлены отдельные П-образные шихтованные магнитопроводы статора с обмотками управления, ротор представляет собой отдельные П-образные шихтованные магнитопроводы, установленные в отверстиях гибкого зубчатого колеса, прикрепленного винтами к корпусу; жесткое зубчатое колесо прикреплено винтами к выходному валу и установлено на подшипнике (Авторское свидетельство СССР №1584699).
Недостатком известного торцевого волнового электродвигателя является низкая частота переключений фаз электромагнитных катушек, выражающаяся в малом быстродействии, из-за большой массы подвижных якорей, соединенных с шихтованными магнитопроводами.
Технический результат заключается в повышении быстродействия благодаря увеличению максимальной частоты переключения фаз элкктромагнитных катушек, увеличению частоты приемистости двигателя.
Дополнительным эффектом является возможность наложения высокочастотных колебаний с целью снижения механических потерь в зубчатом зацеплении и с целью устранения зоны нечувствительности, что приведет к повышению точности установки угла выходного вала шагового двигателя.
Технический результат достигается тем, что торцевой волновой электродвигатель, содержит корпус, в котором размещены статор, ротор, выполненный в виде гибкой диафрагмы в форме диска, выходной вал с жестким зубчатым колесом, при этом зубья на гибком и жестком колесе выполнены торцевыми, гибкая диафрагма представляет собой гибкое колесо с торцевым зубчатым венцом, при этом новизна заключается в том, что электромагнитные катушки выполнены плоскими в виде спиралевидной намотки и размещены в теле гибкого колеса из немагнитного материала, постоянные магниты статора расположены на двух выступах в боковой стенке корпуса с обеих сторон гибкого колеса, по окружности, симметрично центральной оси так, что напротив каждой пары магнитов расположена часть гибкого колеса, в которой выполнена спиралевидная катушка индуктивности.
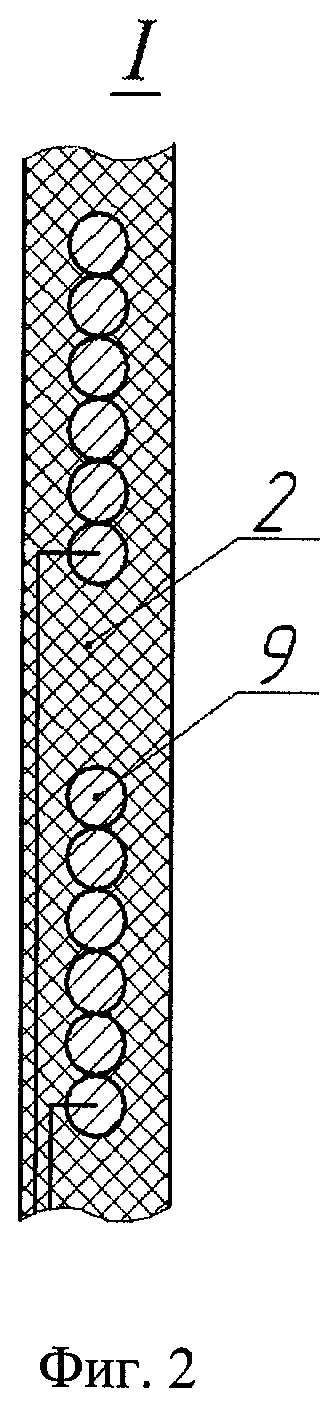
На фиг.1 изображен продольный разрез торцевого волнового электродвигателя. На фиг.2 изображен местный разрез гибкого колеса торцевого волнового электродвигателя.
Торцевой волновой электродвигатель содержит корпус 1, в котором закреплено гибкое колесо 2, зубчатый венец 3 которого входит в зацепление с зубчатым венцом 4 жесткого колеса 5, закрепленного на подшипниках 6 в корпусе 1 и жестко связанного с выходным валом 7. Две группы по восемь постоянных магнитов 8 расположены на двух выступах боковой стенке корпуса 1 с обеих сторон гибкого колеса 2, по окружности, симметрично центральной оси так, что напротив каждого из них располагается часть гибкого колеса 2, в которой выполнена спиральная катушка индуктивности 9, соединенная с помощью проводов 10 с коммутационной коробкой 11.
Подшипники 6 обеспечивают коаксиальное расположение жесткого колеса 5, гибкого колеса 2 и возможность вращения выходного вала 7 относительно корпуса 1 двигателя.
Электродвигатель работает следующим образом. При подключении спиральных катушек индуктивности 9, гибкое колесо 2 деформируется, и его возбужденные полюса притягиваются к жесткому колесу 5, обеспечивая зацепление зубчатых венцов 3 и 4.
При поочередном подключении фаз двигателя к источнику питания происходит поворот волны деформации гибкого колеса 2 и его прокатывание по жесткому колесу 5. Так как при этом гибкое колесо 2 остановлено от собственного вращения винтами, то жесткое колесо 5, установленное на подшипниках 6 и жестко соединенное с выходным валом 7, приходит во вращение.
В процессе работы магнитный поток каждой фазы замыкается по магниту 8, закрепленному на выступе боковой стенки корпуса 1, воздушному зазору, спиральной катушке 9 гибкого колеса 2, воздушному зазору, магниту 8, закрепленному с противоположной стороны от гибкого колеса 2 на выступе боковой стенки корпуса 1.
Вследствие разницы числа зубьев зубчатого венца 4 жесткого колеса 5 и зубчатого венца 3 гибкого колеса 2 волновой передачи, выходной вал 7 будет иметь малую частоту вращения.
Зубчатый венец 3 гибкого колеса 2 размещен вне рабочего зазора двигателя, что существенно уменьшает сам зазор, снижает вихревые токи и поэтому ведет к повышению КПД.
Выполнение гибкого колеса 2 волновой передачи двигателя в виде диска упрощает конструкцию волновой передачи и устройства в целом.
Выполнение электромагнитных катушек 9 в виде спиралей, помещенных внутрь гибкого колеса 2, позволяет уменьшить вес вращающихся частей двигателя, повысив его быстродействие.
Малый вес движущихся частей двигателя позволяет при наложении высокочастотных колебаний повысить точность установки угла выходного вала шагового двигателя, благодаря снижению механических потерь в зубчатом зацеплении и уменьшению зоны нечувствительности.
Волновая передача собрана с преднатягом в зацеплении так, что обеспечивает эффект самоторможения в отключенном состоянии.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОТОР-РЕДУКТОР С ИНТЕГРИРОВАННЫМ ПРЕЦЕССИРУЮЩИМ ЗУБЧАТЫМ КОЛЕСОМ (ВАРИАНТЫ) | 2013 |
|
RU2538478C1 |
| ТОРЦЕВОЙ ЭЛЕКТРОДВИГАТЕЛЬ С КАЧАЮЩИМСЯ РОТОРОМ | 2019 |
|
RU2720887C1 |
| Торцовый волновой электродвигатель | 1983 |
|
SU1111236A1 |
| Волновой шаговый электродвигатель | 1978 |
|
SU936265A1 |
| Волновой электродвигатель | 1986 |
|
SU1334304A1 |
| ПЛАНЕТАРНЫЙ ЭЛЕКТРОМОТОР-РЕДУКТОР С ИЗМЕНЯЮЩИМСЯ ЭКСЦЕНТРИСИТЕТОМ ВРАЩЕНИЯ САТЕЛЛИТ-ЯКОРЯ | 2007 |
|
RU2352047C2 |
| Линейно-цепной электродвигатель | 2020 |
|
RU2736775C1 |
| Волновой электродвигатель | 1976 |
|
SU571858A2 |
| Торцовый волновой электродвигатель | 1982 |
|
SU1241366A1 |
| Двухступенчатый конический волновой редуктор с электродвигателем | 2021 |
|
RU2771554C1 |
Изобретение относится к области электротехники и может быть использовано в робототехнических установках с программным управлением, включающих электропривод с шаговым двигателем, в частности линейным или двухкоординатным, и требующих точного позиционирования исполнительного механизма. Технический результат, достигаемый при использовании настоящего изобретения, заключается в повышении быстродействия электродвигателя. Предлагаемый торцевой волновой электродвигатель содержит корпус, в котором размещен статор, ротор, выполненный в виде гибкого колеса (диафрагмы в форме диска), выходной вал с жестким зубчатым колесом, при этом зубья на гибком и жестком колесе выполнены торцевыми. Причем согласно изобретению электромагнитные катушки выполнены плоскими в виде спиралевидной намотки и размещены в теле гибкого колеса из немагнитного материала, постоянные магниты статора расположены на двух выступах в боковой стенке корпуса с обеих сторон гибкого колеса, по окружности, симметрично центральной оси так, что напротив каждой пары магнитов расположена часть гибкого колеса, в которой выполнена спиралевидная катушка индуктивности. 2 ил.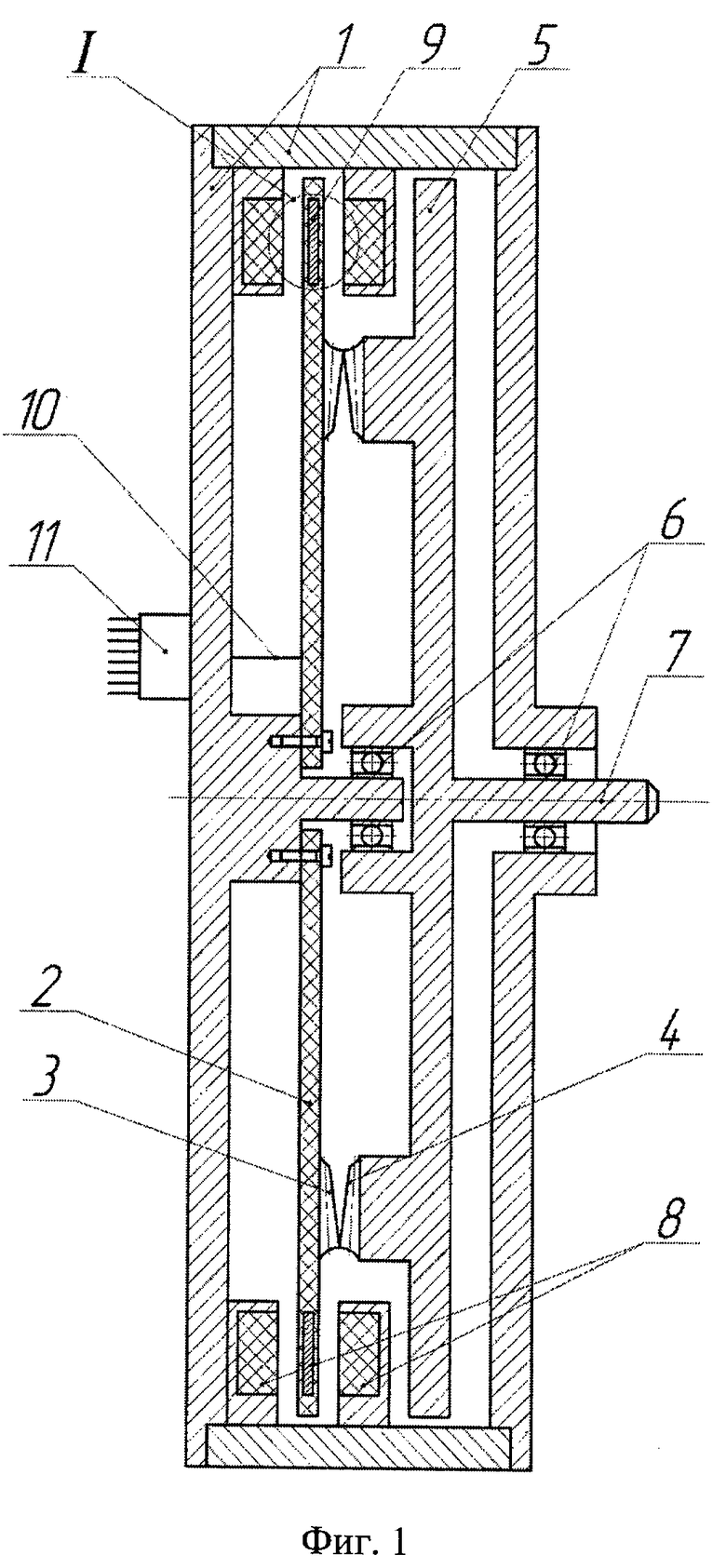
Торцевой волновой электродвигатель, содержащий корпус, в котором размещен статор, ротор, выполненный в виде гибкого колеса, выходной вал с жестким зубчатым колесом, при этом зубья на гибком и жестком колесе выполнены торцевыми, отличающийся тем, что, с целью повышения быстродействия электродвигателя, электромагнитные катушки выполнены плоскими в виде спиралевидной намотки и размещены в теле гибкого колеса из немагнитного материала, постоянные магниты статора расположены на двух выступах в боковой стенке корпуса с обеих сторон гибкого колеса по окружности, симметрично центральной оси так, что напротив каждой пары магнитов расположена часть гибкого колеса, в которой выполнена спиралевидная катушка индуктивности.
| Торцовый волновой электродвигатель | 1988 |
|
SU1584699A1 |
| Шаговый электродвигатель с колеблющимся ротором | 1987 |
|
SU1598066A1 |
| Торцовый волновой электродвигатель | 1990 |
|
SU1746486A1 |
| Волновой торцовый электродвигатель | 1981 |
|
SU1065989A1 |
| Торцовый волновой электродвигатель | 1985 |
|
SU1277311A1 |
| Торцовый волновой электродвигатель | 1982 |
|
SU1241366A1 |
| Торцовый волновой электродвигатель | 1983 |
|
SU1111236A1 |
| Торцовый волновой электродвигатель | 1983 |
|
SU1108579A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Разбрасыватель сыпучих и пастообразных материалов | 1986 |
|
SU1356984A1 |
| Устройство для автоматического регулирования постоянства смеси двух жидкостей | 1935 |
|
SU48195A1 |

