Изобретение относится к машиностроению и предназначено для механизации и автоматизации операций в технологических камерах, например, при выполнении дробеструйных или окрасочных операций.
Целью изобретения является повышение надежности работы в запыленных средах за счет уменьшения числа трущихся элементов с одновременным расширением технологических возможностей за счет увеличения зоны обслуживания.
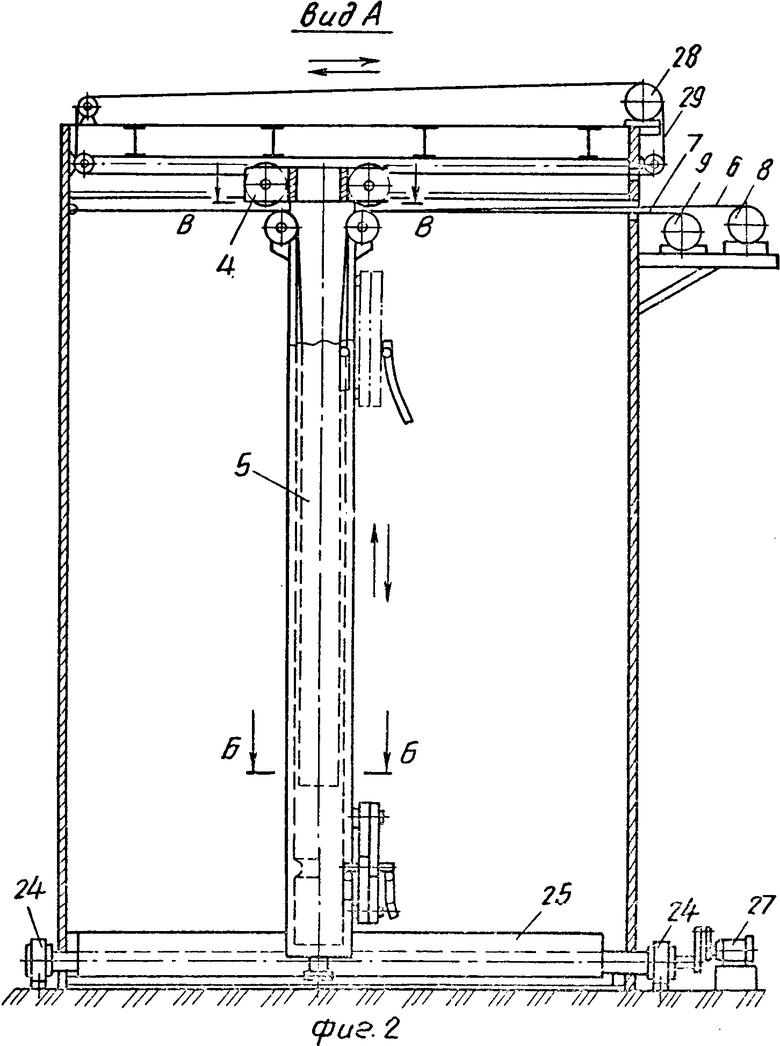
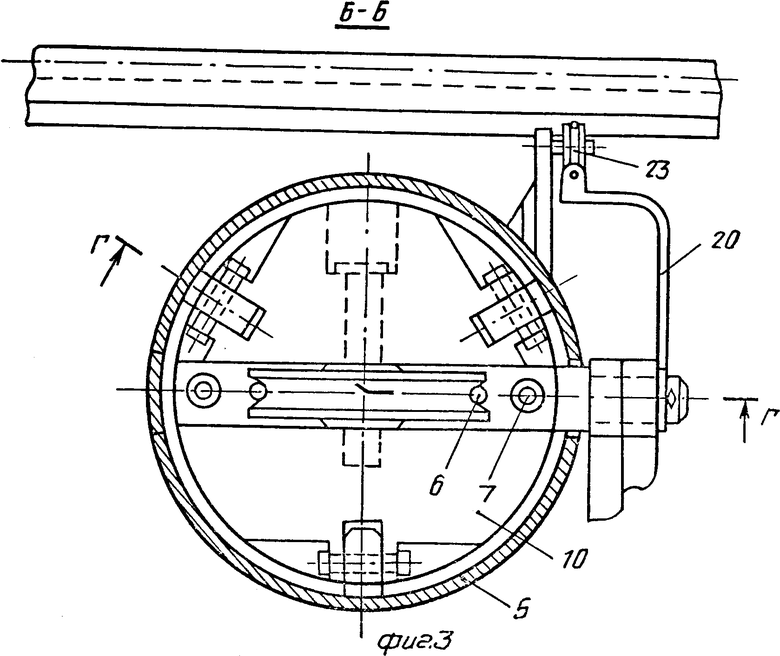
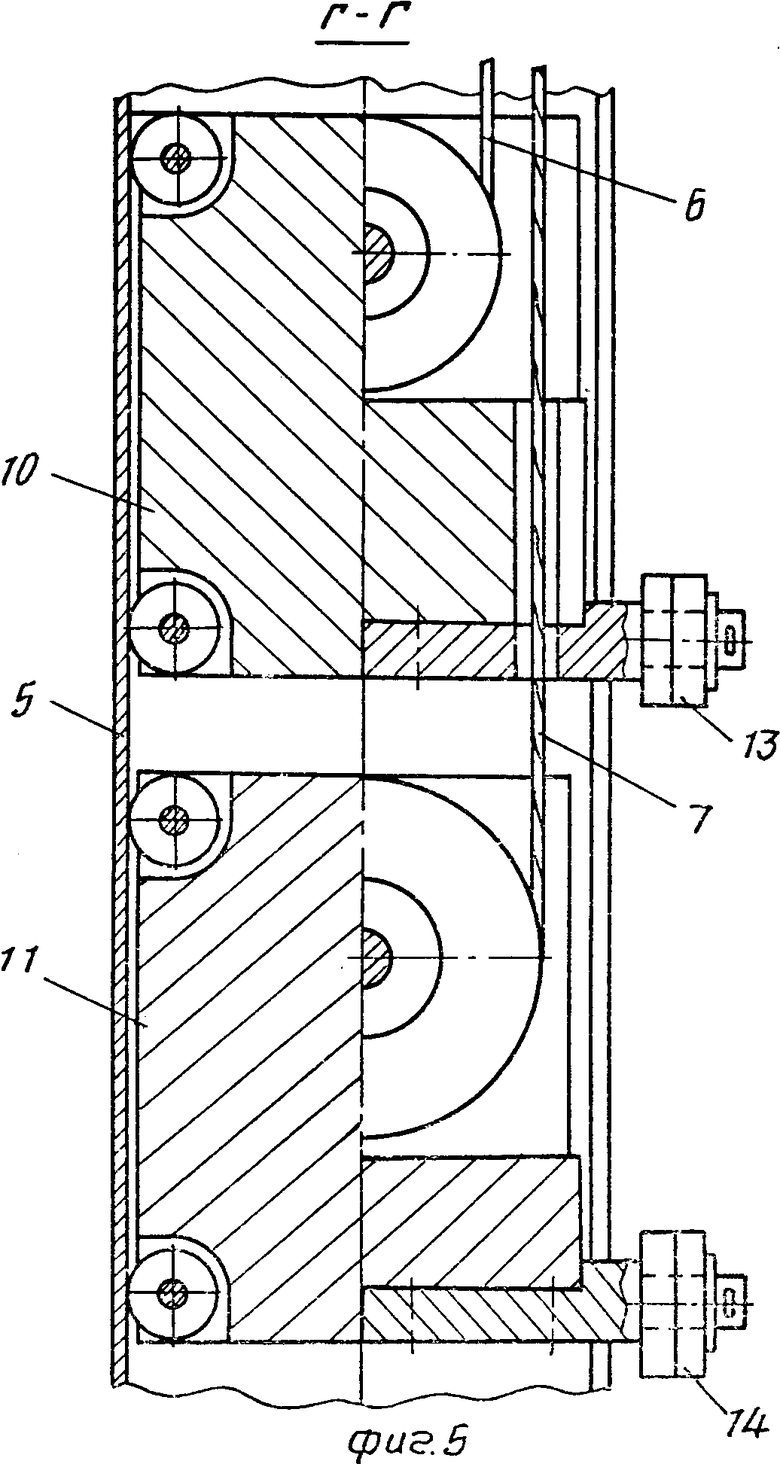
На фиг. 1 изображен манипулятор; на фиг. 2 - вид А на фиг. 1, на фиг. 3 - разрез Б-Б на фиг. 2, на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - разрез Г-Г на фиг. 3; на фиг. 6, 7 - кинематическая схема манипулятора.
Манипулятор состоит из основания 1 с верхними и нижними направляющими 2 и 3 для первой основной каретки 4 с полой трубчатой направляющей 5, в которой посредством дополнительно введенных индивидуальных трособлочных систем 6 и 7, связанных с приводами 8 и 9, установлены вторая основная и дополнительная каретки 10 и 11, в свою очередь шарнирно связанные через продольную щель 12 в направляющей 5 с концами ведущих рычагов 13 и 14 шарнирно-рычажного механизма пантографного типа, вторые концы которой шарнирно связаны рычагами 15 и 16, на общей оси которых закреплен рычаг 17 держателя. На одном конце рычага 17 крепят держатель рабочего инструмента (сопло дробеструйного аппарата, форсунку), а другой конец тягами 18 и 19 связан с закрепленным на второй каретке двуплечим рычагом 20, второе плечо которого соединено с замкнутым гибким тросом 21, установленным в верхнем и нижнем роликах 22 и 23, которые закреплены подвижно на направляющей 5. Вдоль направляющей 3 на опорах 24 установлен эксцентриковый барабан 25 с эластичной рабочей поверхностью 26 и приводом 27 поворота. При повороте поверхность 26 продвигает гибкий трос 21 с роликом 23. В верхней части основания 1 установлен привод 28, связанный дополнительно введенной трособлочной системой 29 с первой основной кареткой 4. Все приводы вынесены за пределы камеры.
Манипулятор работает следующим образом.
При включении привода 28 каретка 4 посредством трособлочной системы 29 перемещается в направляющих 2 и 3. При включении приводов 8 и 9 каретки 10 и 11 посредством трособлочных систем 6 и 7, соответственно, перемещаются в направляющей 5. При включении привода одной из кареток либо работе приводов с разными скоростями или в противоположных направлениях изменяется взаимное расположение рычагов 13 и 14 и рычаг 17 вместе с держателем рабочего инструмента приближается или удаляется от направляющей 5. При включении привода 27 поворачивается эксцентриковый барабан 25, гибкий трос 21 зажимается между роликом 23 и эластичной поверхностью 26 и передает усилие привода 27 посредством рычага 20 и тяг 19, 18 на рычаг 17, который поворачивается и устанавливает держатель рабочего инструмента, например сопло, под требуемым углом к горизонтальной плоскости. При реверсе привода 27 можно обеспечить покачивание держателя.
Размещение кареток в трубчатой направляющей и вынесение их приводов из рабочей зоны позволяет снизить износ подвижных частей и повысить надежность их работы. Все это расширяет технологические возможности и повышает надежность манипулятора, позволяет использовать его в технологических камерах с агрессивной и запыленной средой, например в дробеструйных. (56) Авторское свидетельство СССР N 1042991, кл. B 25 J 9/00, 1981.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1989 |
|
SU1584290A1 |
| УСТРОЙСТВО ДЛЯ СБОРА И ВЫГРУЗКИ МУСОРА С ИСПОЛЬЗОВАНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2009971C1 |
| БУРОРЫХЛИТЕЛЬНОЕ УСТРОЙСТВО | 1991 |
|
RU2009993C1 |
| УСТРОЙСТВО ДЛЯ НАКОПЛЕНИЯ МЕРНЫХ ОТРЕЗКОВ ТЕКСТИЛЬНЫХ ПОЛОТЕН | 1991 |
|
RU2009973C1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА И ПОДЪЕМА ПЛАВАЮЩИХ ОБЪЕКТОВ | 1991 |
|
RU2009979C1 |
| СТАНОК ДЛЯ НАМОТКИ ИЗДЕЛИЙ ТИПА БАЛЛОНОВ | 1986 |
|
SU1383697A1 |
| ТРАНСПОРТНО-ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО И ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ К НЕМУ | 1991 |
|
RU2009968C1 |
| ВАРИАТОР | 1990 |
|
RU2010140C1 |
| КОМБИНИРОВАННЫЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК | 1991 |
|
RU2009887C1 |
| ПЕРЕГРУЖАТЕЛЬ | 1991 |
|
RU2009969C1 |


Изобретение относится к машиностроению и предназначено для механизации и автоматизации операций в технологических камерах при выполнении дробеструйных или окрасочных операций. Целью изобретения является повышение надежности работы в запыленных средах за счет уменьшения числа трущихся элементов с одновременным расширением технологических возможностей за счет увеличения зоны обслуживания. При включении привода перемещения первой основной каретки 4, она перемещается по направляющим 2 и 3 за счет дополнительно введенной трособлочной системы. При раздвижении или сдвижении второй основной и дополнительной кареток, которые подвижно установлены в полой трубчатой направляющей 5, происходит поворот ведущих рычагов 13 и 14, которые образуют шарнирно-рычажный механизм механической руки. При этом рычаг 17 держателя обрабатывающего сопла перемещается прямолинейно относительно основания 1. При вращении эксцентрикового барабана 25 с эластичной наружной поверхностью 26 происходит касание рычага 17 держателя, обусловленное кинематической связью тяг 18 и 19 с замкнутым гибким тросом 21. 7 ил.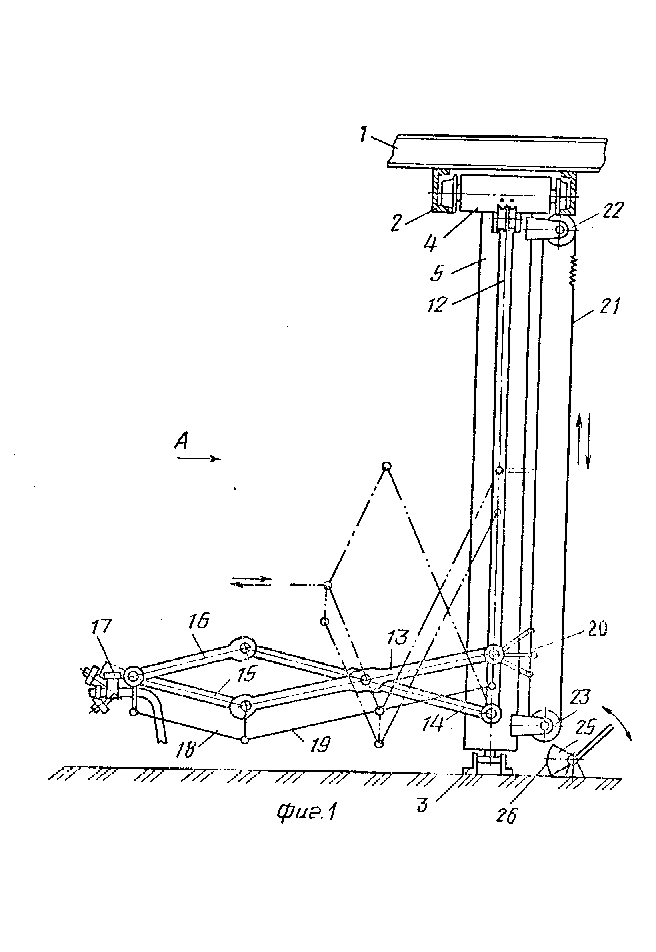
МАНИПУЛЯТОР , содеpжащий основание с напpавляющими, на котоpых pасположена пеpвая основная каpетка, кинематически связанная с втоpой основной каpеткой, на котоpой установлена механическая pука с деpжателем pабочего инстpумента, а также пpиводы пеpемещения деpжателя по тpем кооpдинатам, отличающийся тем, что, с целью повышения надежности pаботы в запыленных сpедах за счет уменьшения числа тpущихся элементов с одновpеменным pасшиpением технологических возможностей за счет увеличения зоны обслуживания, он снабжен полой тpубчатой напpавляющей, дополнительной каpеткой с пpиводом ее пеpемещения и механизмом качания деpжателя pабочего инстpумента, выполненным в виде тяги, жестко связанной с гибким тpосом и шаpниpно - с механической pукой, pычага, один конец котоpого жестко связан с деpжателем, а дpугой - с тягой, и пpиводного эксцентpикового баpабана, имеющего эластичную наpужную повеpхность, кинематически связанную с этим гибким тpосом, и установленного на основании с возможностью повоpота относительно него, пpи этом гибкий тpос шаpниpно связан с полой тpубчатой напpавляющей пpи помощи дополнительно введенных подвижных pоликов, кpоме того полая тpубчатая напpавляющая жестко связана с пеpвой основной каpеткой, а дополнительная каpетка совместно с втоpой основной каpеткой подвижно установлены одна за дpугой внутpи этой полой тpубчатой напpавляющей, и все тpи каpетки кинематически связаны с соответствующими пpиводами пpи помощи дополнительно введенных индивидуальных тpособлочных систем, пpи этом механическая pука выполнена в виде шаpниpно-pычажного пантогpафа, ведущие pычаги котоpого шаpниpно связаны, соответственно, с втоpой основной и с дополнительной каpетками, в шаpниpе ведомого звена пантогpафа подвижно установлен pычаг деpжателя pабочего инстpумента и все пpиводы пеpемещения каpеток жестко установлены на основании.
