Фи.г.1
тяги 14. На Р 1 подают деталь, подлежащую гибка. В зоне гибки Р 1 опускается. Деталь удерживается на опорах гибочного пресса. При этом Р 1 полностью выводится из зоны действия рабочего органа пресса. После завершения гибки Р 1 поднимается вместе с деталью. Рычаги 6 взаимодействуют с упором 18. При этом Р 1 и К 7 поворачиваются относительно оси 5. Деталь скатывается с рольганга под действием силы тяжести. 5 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ГИБКИ ТРУБ | 1992 |
|
RU2008117C1 |
| Установка для подачи листов к гильотинным ножницам | 1974 |
|
SU510331A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ПРОФИЛЕЙ | 1992 |
|
RU2045362C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ДВУХПЕТЛЕВОГО СТРОПА ИЗ КОЛЬЦЕВОГО ЖГУТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2087228C1 |
| Устройство для сортировки цилиндрических изделий | 1985 |
|
SU1482738A1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| Вертикальный накопитель | 1989 |
|
SU1698148A1 |
| ТРУБОГИБОЧНАЯ УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ ЗМЕЕВИКОВ | 1996 |
|
RU2101115C1 |
| Механизированная линия гибки и правки остряков | 1989 |
|
SU1704889A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ПОДАЧИ ДЛИННОМЕРНЫХ ЗАГОТОВОК | 2016 |
|
RU2615826C1 |
Изобретение относится к пром. транспорту. Цель изобретения - повышение надежности и произ-ти рольганга. Рольганг содержит подвижную раму (Р) 1 с установленными на ней роликами 2, оборудованную колесами 3. Посредством консольных шарниров 4 и оси 5 и двух параллельных рычагов 6 Р 1 соединена с коромыслом (К) 7 с образованием шарнирного параллелограмма. Один конец К 7 подпружинен пружинами 8 к опорной Р 9, расположенной на основании. На Р 9 расположены фиксаторы и колеса 11 для наладочных работ. На основании закреплен упор 18, взаимодействующий с одной из пар рычагов 6. Привод подъема Р 1 состоит из рабочего органа и тяги 14. На Р 1 подают деталь, подлежащую гибке. В зоне гибки Р 1 опускается. Деталь удерживается на опорах гибочного пресса. При этом Р 1 полностью выводится из зоны действия рабочего органа пресса. После завершения гибки Р 1 поднимается вместе с деталью. Рычаги 6 взаимодействуют с упором 18. При этом Р 1 и К 7 поворачиваются относительно оси 5. Деталь скатывается с рольганга под действием силы тяжести. 5 ил.
Изобретение относится к промышленному транспорту, а именно к рольгангам, применяемым, в частности при транспортировании изделий в гибочном производстве.
Цель изобретения - повышение надежности и производительности рольганга .
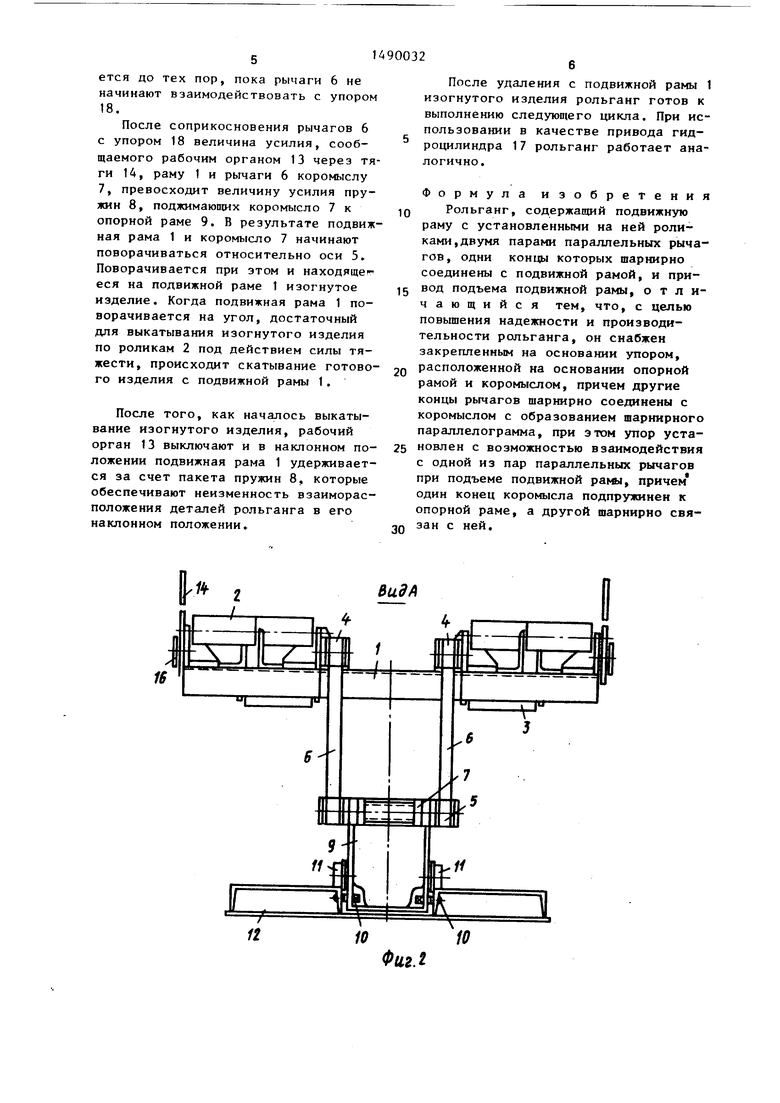
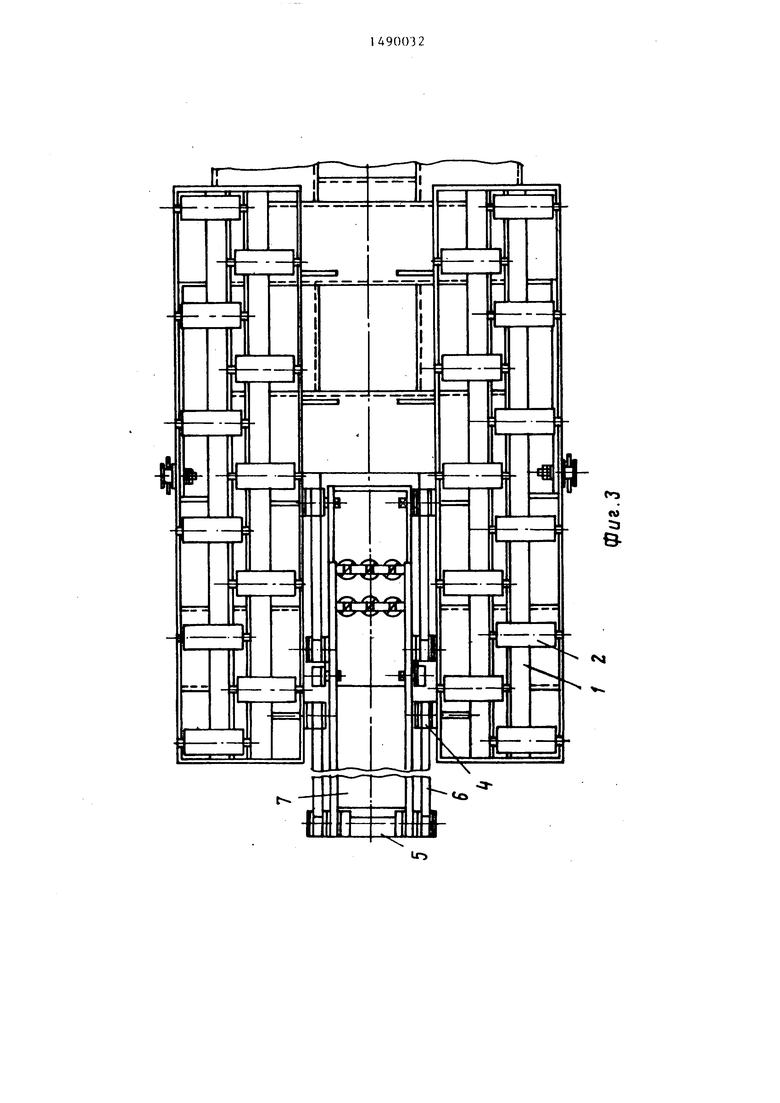
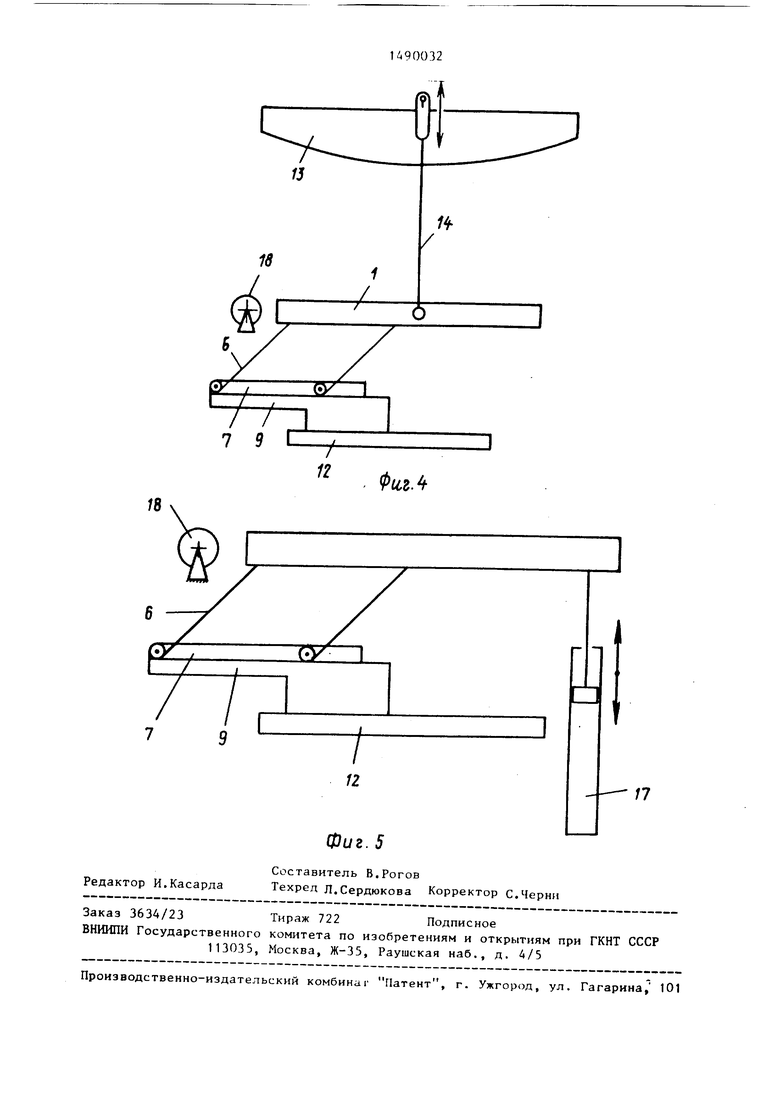
На фиг. 1 изображен рольганг, об- ищй вид; на фиг. 2 - вид А на фиг.1 на фиг. 3 - рольганг, вид в плане; на фиг. А и 5 - возможные варианты выполнения привода рольганга.
Рольганг содержит подвижную раму 1 П-образной формы с установленными на ней роликами 2. оборудованную колесами 3. Подвижная рама 1 посредством консольных шарниров 4, сквозной оси 5 и двух параллельных рычагов 6 соединена с коромыслом 7 с образова- кием шарнирного параллелограмма. Один конец коромысла 7 подпружинен пружинами 8 к опорной раме 9, расположенной на основании, а другой - шарнирно связан с ней. На опорной раме 9 расположены фиксаторы 10 и колеса 11. На колесах 3 и 11 подвижная 1 и опорная 9 рамы могут перемещаться по направляющей 12 во время наладочных работ.
Привод подъема подвижной рамы 1 осуществляется от основного гибочног рабочего органа 13, в рабочем цикле которого используется данный рольганг (фиг. 4), для чего предназна- чены тяги 14, выполненные с пазом 15 на свободном конце и соединенные с помощью консольно установленных осей 16 с подвижной рамой 1. Привод может быть выполнен и индивидуаль- ным (фиг. 5), например, в виде гидроцилиндра 1 7.
На основании закреплен упор 18 с возможностью взаимодействия с одной из пар параллельных рычагов 6 при подъеме подвижной рамы 1.
К рольгангу, находящему в исходном положении (фиг-. 1), любым известным способом, например, с помощ
5
5
0
0 5 0
З Q
внешнего силового воздействия, подают элемент, поддежащий гибке (не показан), и по роликам 2 перемещают его в зону гибки. При этом элемент занимает всю поверхность подвижной рамы 1 на роликах 2 между тягами 14 (фиг. 2 и 3). В зоне гибки элемент устанавливают в специальных опорах, которые относятся к конструкции гибочного оборудования.
Для того, чтобы осуществить саму операцию гибки, необходимо убрать рольганг из зоны действия гибочного рабочего органа 13 (фиг. 4). Для этого последний начинают опускать. При этом опускаются и тяги 14, соединенные с подвижной рамой 1 рольганга . Это влечет за собой опускание под действием силы тяжести и подвижной рамы 1. Опускание последней осуществляется поступательно ввиду наличия шарнирного параллелограммного механизма, установленного на опорной раме 9. Такое движение происходит до тех пор, пока колеса 3 не касаются направляющей 12. В этот момент движение подвижной рамы 1- прекращается. При этом рольганг полностью выходит из зоны гибки, т.е. из зоны действия рабочего органа, а элемент, подлежащий гибке, остается в рабочей зоне, удерживаясь на опорах.
Осуществляют саму операцию гибки. После ее завершения необходимо удалить готовое изделие. Для этого приступают к поднятию подвижной рамы 1 рольганга.
При движении гибочного рабочего органа 13 вверх подъемное усилие через тяги 14 (после выборки паза 15) и консольные оси 16 передается на подвижную раму 1. Последняя начинает также поступательно, как и при опускании, перемещаться вверх.
Дойдя до изогнутого изделия, подвижная рама 1 продолжает поступательное движение вверх уже совместно с этим изделием, поднимая его над зоной гибки. Такое движение продолжается до тех пор, пока рычаги 6 не начинают взаимодействовать с упором 18.
После соприкосновения рычагов 6 с упором 18 величина усилия, сообщаемого рабочим органом 13 через тяги 14, раму 1 и рычаги 6 коромыслу 7, превосходит величину усилия пружин 8, поджимаюпщх коромысло 7 к опорной раме 9. В результате подвижная рама 1 и коромысло 7 начинают поворачиваться относительно оси 5. Поворачивается при этом и находящего еся на подвижной раме 1 изогнутое изделие. Когда подвижная рама 1 поворачивается на угол, достаточный для выкатывания изогнутого изделия по роликам 2 под действием силы тяжести, происходит скатывание готово- го изделия с подвижной рамы 1.
После того, как началось выкатывание изогнутого изделия, рабочий орган 13 выключают и в наклонном по- ложении подвижная рама 1 удерживается за счет пакета пружин 8, которые обеспечивают неизменность взаиморасположения деталей рольганга в его наклонном положении.
После удаления с подвижной рамы изогнутого изделия рольганг готов к выполнению следующего цикла. При использовании в качестве привода гидроцилиндра 17 рольганг работает аналогично.
Формула изобретения
Рольганг, содержащий подвижную раму с установленными на ней роликами, двумя парами параллельных рычагов, одни концы которых шарнирно соединены с подвижной рамой, и привод подъема подвижной рамы, отличающийся тем, что, с целью повышения надежности и производительности рольганга, он снабжен закрепленным на основании упором, расположенной на основании опорной рамой и коромыслом, причем другие концы рычагов шарнирно соединены с коромыслом с образованием шарнирного параллелограмма, при этом упор установлен с возможностью взаимодействия с одной из пар параллельных рычагов при подъеме подвижной ракш, причем один конец коромысла подпружинен к опорной раме, а другой шарнирно связан с ней.
/
/f
О
t
/2
/7
