Известны способы автоматического управления рабочим процессом одноковшовой погрузочной машины. Однако такие способы не обеспечивают предельного заполнения ковша и снижения динамического усилия на рабочем органе машины.
Предлагаемый способ отличается от известных тем, что измеряют усилие внедрения ковша, передаваемое со стрелы через шток на датчики усилия внедрения, установленные под штоком стрелы, и полученный сигнал передают на контакторы барабанов подъемного механизма для их включения.
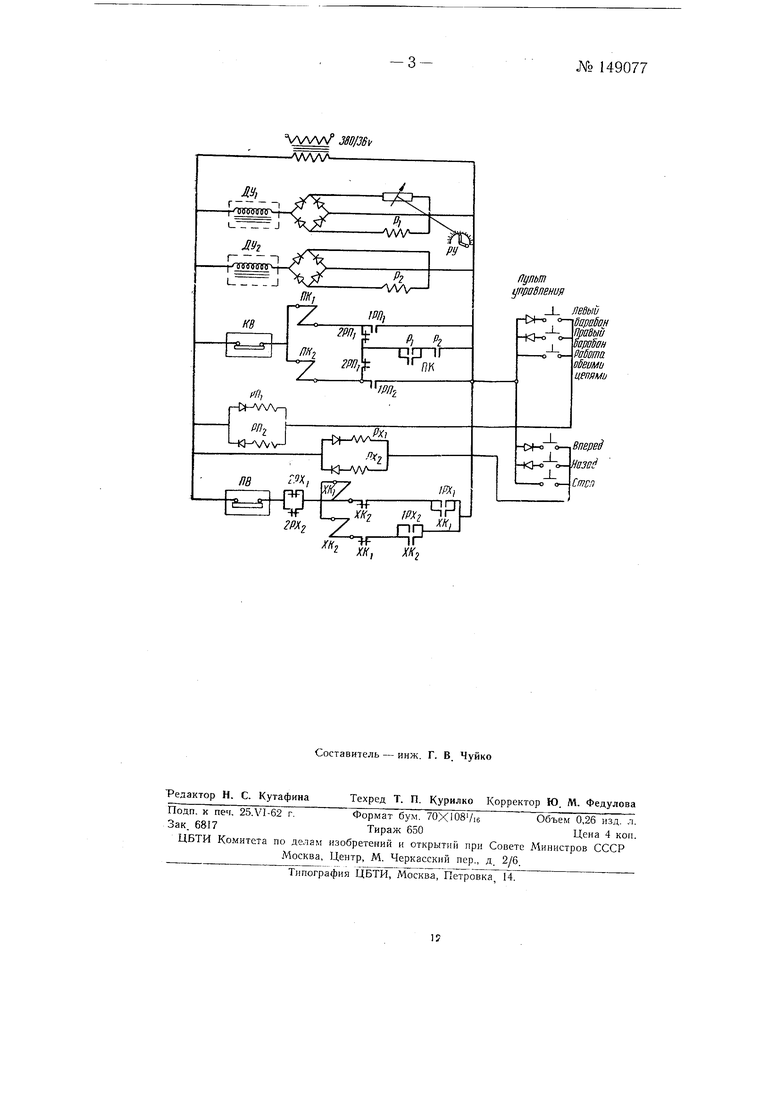
На чертеже дана схема дистанционного управления с автоматизацией процесса черпания, поясняющая предлагаемый способ.
Схема работает следующим образом.
Датчики усилия внедрения ДУ; и ДУч, установленные под штоком стрелы, контролируют усилие внедрения и управляют контакторами Я/С, и ЯД2 электромагнитов управления левого и правого барабанов подъемного механизма. Дистанционное управление барабанов осуществляется с помощью реле РЯ, и РЯд, цепь которых коммутируется кнопками, вынесенными на пульт управления.
Для сокращения числа проводов в цепи дистанционного управления использованы полярные качества тока, благодаря чему для подачи -шести команд Б цепи управления используются три жилы. Таким образом, возможно дистанционное управление отдельно каждым электромагнитом или двумя электромагнитами одновременно.
По аналогичной схеме осуществляется дистанционное управление ходовыми контакторами Х/С и ХК,:, включающими тормозные электромагниты хода вперед и назад. Электрическая блокировка контактов хода вперед и назад исключает одновременность их включения.
Предлагаемый способ автоматизированного дистанционного управления рабочим процессом совершенно исключает затраты мускульной
№ 149077-2силы, устраняет напряжение внимания, необходимое при производстве черпания, позволяет повысить наполнение ковша и снизить динамические усилия на рабочем органе машины.
Автоматизированное дистанционное управление может быть применено в любой одноковшовой погрузочной машине.
Экспериментальное исследование, проведенное в лабораторных условиях на модели погрузочной м ашины, показало, что наполнение ковша при совмешенном черпании с автоматизацией рабочего процесса составляет 160-170% от наполнения ковша раздельным черпанием при равновеликих усилиях внедрения.
Предмет изобретения
Способ автоматического управления рабочим процессом одноковшовой погрузочной машины, отлИ чающийся тем, что, с целью обеспечения предельного заполнения ковша и снижения динамического усилия на рабочем органе машины, измеряют усилие внедрения ковша, передаваемое со стрелы через шток на датчики усилия внедрения, установленные под штоком стрелы, и полученный сигнал передают на контакторы барабанов подъемного механизма для их включения.
VWV
тыу
snpseuH
Правый
парпШ
Работа
обеими
цепйми
ff-II
jr/r,//f;
| название | год | авторы | номер документа |
|---|---|---|---|
| Одноковшовый рабочий орган погрузочной машины с нижним черпанием | 1959 |
|
SU127631A1 |
| Вибрационный рабочий орган погрузочной машины | 1961 |
|
SU143763A1 |
| Устройство ударного действия для дробления негабаритных кусков горных пород в подземных условиях | 1957 |
|
SU111590A1 |
| Гидропривод ковшового погрузчика | 1979 |
|
SU1273463A1 |
| СИСТЕМА УПРАВЛЕНИЯ ОДНОКОВШОВОГО ПОГРУЗЧИКА | 2019 |
|
RU2729537C1 |
| ГИДРОПРИВОД ОДНОКОВШОВОГО ФРОНТАЛЬНОГО ПОГРУЗЧИКА | 1992 |
|
RU2092658C1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР СИСТЕМЫ ИНЖЕНЕРА КУРКОВА | 1991 |
|
RU2005855C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЧЕРПАНИЕМ СЫПУЧЕГО МАТЕРИАЛА | 2002 |
|
RU2235171C2 |
| ФРОНТАЛЬНЫЙ ПОГРУЗЧИК | 2002 |
|
RU2235170C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭКСКАВАЦИЕЙ ГРУНТА И ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2436900C2 |