Изобретение относится к робототехнике и может быть использовано для управления электромеханическими объектами с упругими связями, например механизмами роботов.
Цель изобретения - повышение точности управления при больших значениях редукции механической передачи или значительном демпфировании упругих колебаний механической передачей за счет более точного восстановления переменных вектора состояния.
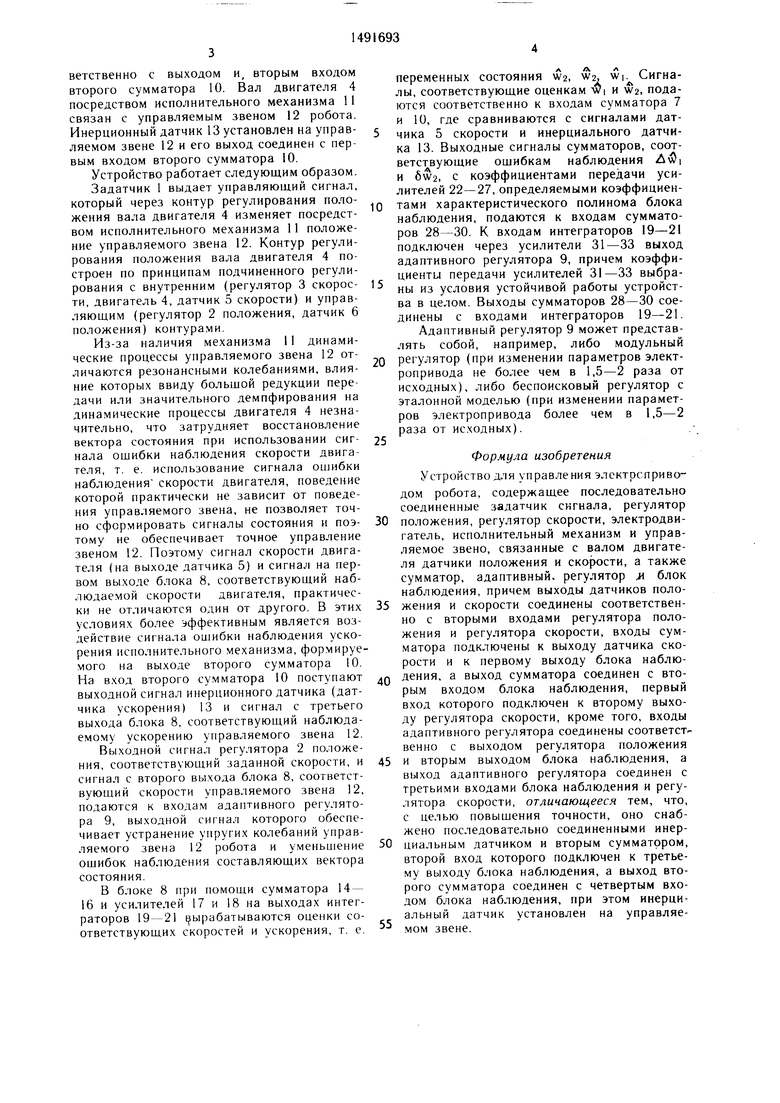
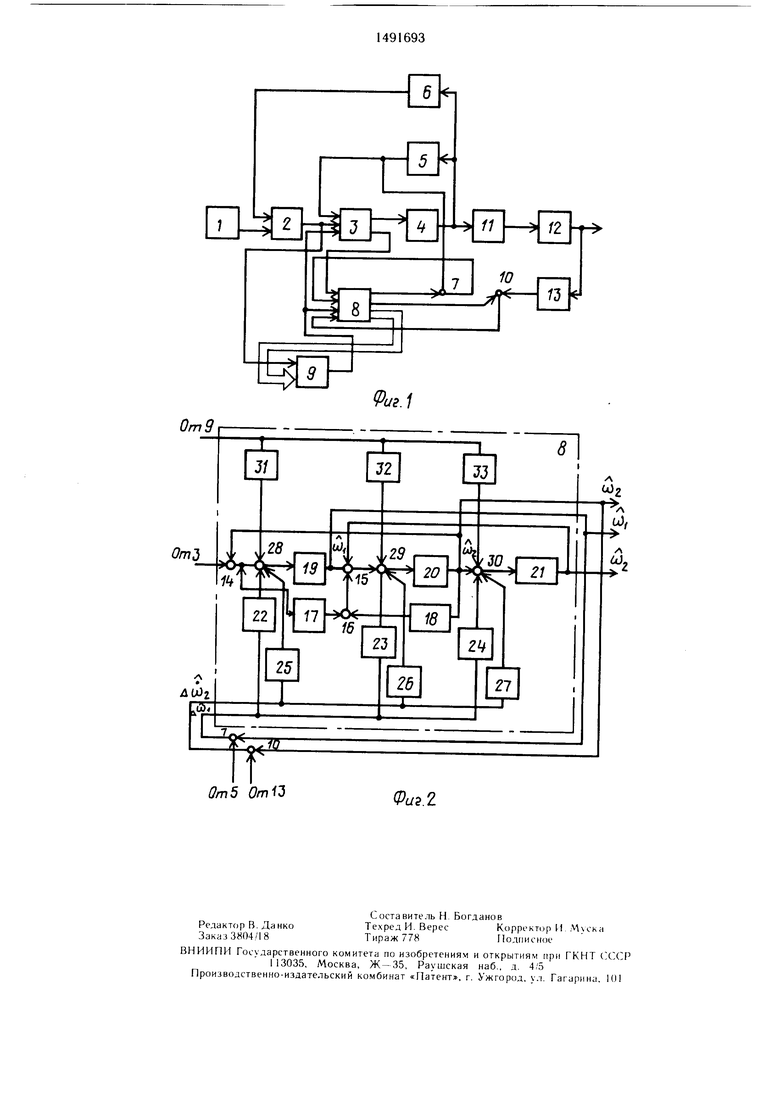
На фиг. 1 представлена блок-схема устройства; на фиг. 2 - пример выполнения блока наблюдения.
Устройство содержит последовательно сое - диненные задатчик 1 сигнала, регулятор 2 положения, регулятор 3 скорости и электродвигатель 4. На валу двигателя установлены датчик 5 скорости и датчик 6 положения, выходы которых подключены соответственно к вторым входам регуляторов скорости и положения. Выход датчика 5 скорости соединен с первым входо.м первого сумматора 7, второй вход и выход которого подключены соответственно к первому выходу и второму входу блока 8 наблюдения, содержащего, например, соединенные между собой п интеграторов и усилители (фиг. 2). Первый вход блока 8 соединен с вторым выходом регулятора скорости, второй выход блока 8 и выход регулятора 2 положения подключены к входам адаптивного регулятора 9, выход которого соединен с третьим входом регулятора скорости и третьим входом блока 8 наблюдения. Четвертый вход и третий выход блока 8 наблюдения соединены соотСО О5
со со
ветственно с выходом и, вторым входом второго сумматора 10. Вал двигателя 4 посредством исполнительного механизма 11 связан с управляемым звеном 12 робота. Инерционный датчик 13 установлен на управляемом звене 12 и его выход соединен с первым входом второго сумматора 10.
Устройство работает следующим образом.
Задатчик 1 выдает управляющий сигнал, который через контур регулирования положения вала двигателя 4 изменяет посредством исполнительного механизма 11 положение управляемого звена 12. Контур регулирования положения вала двигателя 4 построен по принципам подчиненного регулирования с внутренним (регулятор 3 скорости, двигатель 4, датчик 5 скорости) и управляющим (регулятор 2 положения, датчик 6 положения) контурами.
Из-за наличия механизма 11 динамические процессы управляемого звена 12 отличаются резонансными колебаниями, влияние которых ввиду большой редукции передачи или значительного демпфирования на динамические процессы двигателя 4 незначительно, что затрудняет восстановление вектора состояния при использовании сигнала ошибки наблюдения скорости двигателя, т. е. использование сигнала ошибки наблюдения скорости двигателя, поведение которой практически не зависит от поведения управляемого звена, не позволяет точно сформировать сигналы состояния и поэтому не обеспечивает точное управление звеном 12. Поэтому сигнал скорости двигателя (на выходе датчика 5) и сигнал на первом выходе блока 8, соответствующий наблюдаемой скорости двигателя, практически не отличаются один от другого. В этих условиях более эффективным является воздействие сигнала ошибки наблюдения ускорения исполнительного механизма, формируемого на выходе второго сумматора 10. На вход второго сумматора 10 поступают выходной сигнал инерционного датчика (датчика ускорения) 13 и сигнал с третьего выхода блока 8, соответствующий наблюдаемому ускорению управляемого звена 12.
Выходной сигнал регулятора 2 положения, соответствующий заданной скорости, и сигнал с второго выхода блока 8, соответствующий скорости управляемого звена 12, подаются к входам адаптивного регулятора 9, выходной сигнал которого обеспечивает устранение упругих колебаний управляемого звена 12 робота и уменьшение ошибок наблюдения составляющих вектора состояния.
В блоке 8 при помощи сумматора 14 - 16 и усилителей 17 и 18 на выходах интеграторов 19-21 вырабатываются оценки соответствующих скоростей и ускорения, т. е.
5
переменных состояния W2, W2, wi. Сигналы, соответствующие оценкам Wi и wa, подаются соответственно к входам сумматора 7 и 10, где сравниваются с сигналами датчика 5 скорости и инерциального датчика 13. Выходные сигналы сумматоров, соответствующие ошибкам наблюдения Av5i и 6w2, с коэффициентами передачи усилителей 22-27, определяемыми коэффициентами характеристического полинома блока наблюдения, подаются к входам сумматоров 28-30. К входам интеграторов 19-21 подключен через усилители 31-33 выход адаптивного регулятора 9, причем коэффициенты передачи усилителей 31-33 выбраны из условия устойчивой работы устройства в целом. Выходы сумматоров 28-30 соединены с входами интеграторов 19-21. Адаптивный регулятор 9 может представлять собой, например, либо модульный
0 регулятор (при изменении параметров электропривода не более чем в 1,5-2 раза от исходных), либо беспоисковый регулятор с эталонной моделью (при изменении параметров электропривода более чем в 1,5-2 раза от исходных).
Формула изобретения
Устройство для управления электрсприводом робота, содержащее последовательно соединенные задатчик сигнала, регулятор
0 положения, регулятор скорости, электродвигатель, исполнительный механизм и управляемое звено, связанные с валом двигателя датчики положения и CKOJTOCTH, а также сумматор, адаптивный, регулятор м блок наблюдения, причем выходы датчиков поло5 жения и скорости соединены соответственно с вторыми входами регулятора положения и регулятора скорости, входы сумматора подключены к выходу датчика скорости и к первому выходу блока наблю0 дения, а выход сумматора соединен с вторым входом блока наблюдения, первый вход которого подключен к второму выходу регулятора скорости, кроме того, входы адаптивного регулятора соединены соответственно с выходом регулятора положения
5 и вторым выходом блока наблюдения, а выход адаптивного регулятора соединен с третьими входами блока наблюдения и регулятора скорости, отличающееся тем, что, с целью повышения точности, оно снабжено последовательно соединенными инер0 циальным датчиком и вторым сумматором, второй вход которого подключен к третьему выходу блока наблюдения, а выход второго сумматора соединен с четвертым входом блока наблюдения, при этом инерци- альный датчик установлен на управляе5
мом звене.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1987 |
|
SU1462242A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 1990 |
|
RU2037173C1 |
| ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД | 1995 |
|
RU2110882C1 |
| Устройство управления манипулятором робота | 2018 |
|
RU2701459C1 |
| Адаптивный следящий электропривод | 1988 |
|
SU1500991A1 |
| Следящий электропривод с переменным моментом инерции | 1987 |
|
SU1406565A1 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1994 |
|
RU2079867C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2385480C1 |
| Устройство для управления приводом робота | 1990 |
|
SU1782721A1 |
Изобретение относится к робототехнике. Цель изобретения - повышение точности управления звеном робота при больших значениях редукции механической передачи или значительном демпфировании упругих колебаний механической передачи. Устройство содержит последовательно соединенные задатчик сигнала, регулятор положения, регулятор скорости электродвигателя, на валу которого установлены датчики скорости и положения, выходы которых подключены соответственно к регуляторам скорости и положения. Электродвигатель через исполнительный механизм связан с управляемым звеном робота. Устройство содержит также адаптивный регулятор, блок наблюдения, два сумматора и инерциальный датчик, установленный на управляемом звене и дающий информацию о его ускорениях. Сигнал инерциального датчика сравнивается с сигналом соответствующего выхода блока наблюдения. Полученный сигнал ошибки ускорения поступает на один из входов блока наблюдения, где используется для соответствующей коррекции, чем достигается уменьшение ошибок наблюдения по составляющим вектора состояния и, следовательно, повышается точность управления звеном робота. 2 ил.
| Система управления объектом с упругими связями | 1980 |
|
SU941923A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
