15
л
21
СО О)

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический вакуумный перекладчик грузов | 1983 |
|
SU1209559A1 |
| Автоматический вакуумный перекладчик грузов | 1985 |
|
SU1306880A2 |
| КЛАПАН ПЕРЕПУСКНОЙ МАГНИТОРЕГУЛИРУЕМЫЙ ДЛЯ ДВУХФАЗНЫХ СРЕД (ВАРИАНТЫ) | 2008 |
|
RU2368831C1 |
| Стенд с замкнутым силовым контуром для испытания магнитоактивных смазок в зубчатой передаче | 1985 |
|
SU1335859A1 |
| КЛАПАН ПЕРЕПУСКНОЙ С МАГНИТНОЙ ФИКСАЦИЕЙ И АВАРИЙНЫМ СБРОСОМ | 2006 |
|
RU2329427C1 |
| Линия для автоматической индукционной наплавки | 1987 |
|
SU1555088A1 |
| Турбомолекулярный вакуумный насос | 1985 |
|
SU1278488A1 |
| Плоскошлифовальный автоматический комплекс для двусторонней обработки деталей | 1988 |
|
SU1657372A1 |
| Устройство для шлифования | 1991 |
|
SU1779564A1 |
| Устройство для обработки пакетов магнитопроводов | 1984 |
|
SU1254573A1 |
Изобретение относится к транспортной технике и позволяет повысить надежность перекладки грузов при работе с ферромагнитными грузами сложной конфигурации. Магнитопроводный груз (Г) захватывают постоянными магнитами (М) 2 и транспортируют к месту сброса кривошипами 11 и 12, соединенными с реверсивным приводом. В заданной точке толкатель 17 за счет поворота оси 13 внутри корпуса 1 захватного органа отводит М посредством подвижной платформы 4 и двух тяг 3 от Г. Магнитное поле М замыкается в гильзах 7, и Г отпадает от захватывающего устройства. Перекладчик возвращается в исходное положение. 4 ил.
Фиг. 1
Изобретение относится к подъемно- транспортному машиностроению, в частности к устройствам для автоматической подачи листовых магнитопро- г водных заготовок сложной формы, например, пластин магнитопроводов (статоров и роторов) электрических машин, изготовленных из электротехнической стали, пермаллоя, пермендю- ю ра и других магнитопроводных материалов.
Цель изобретения - повышение надежности перекладчика грузов при работе с ферромагнитными грузами 15 сложной конфигурации.
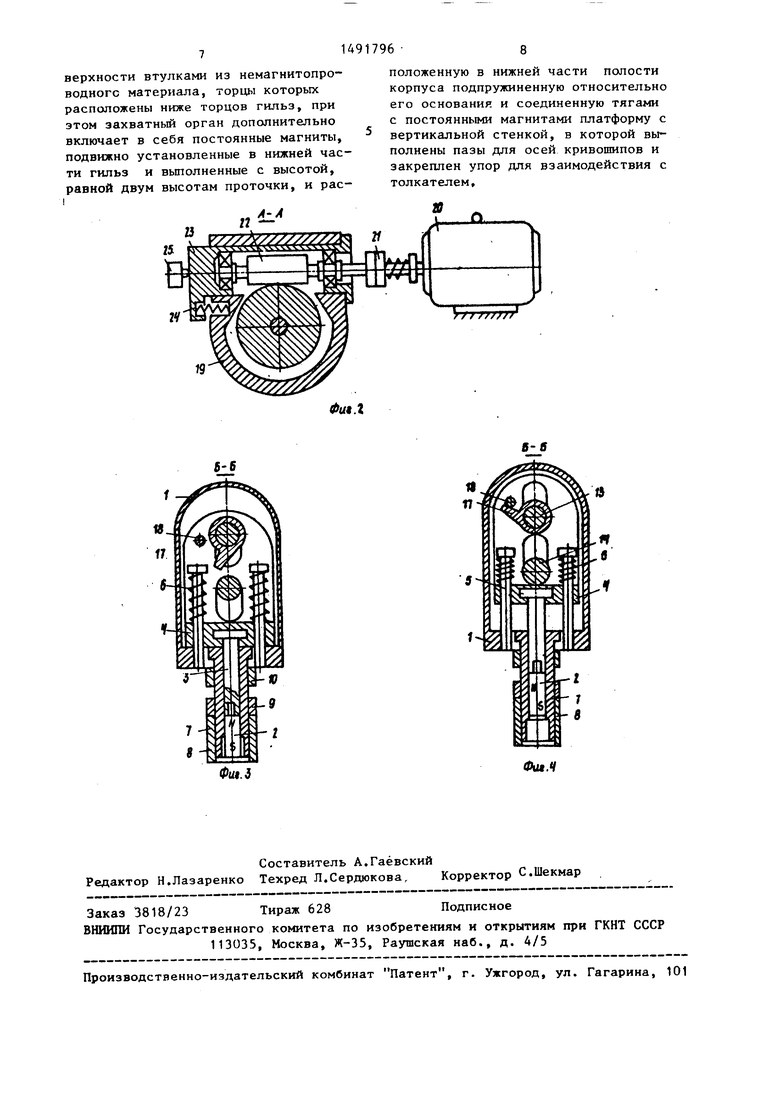
На фиг.1 изображен автоматический перекладчик грузов, разрез; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.1 (выпол- 20 нение магнитного механизма и расположение его деталей в момент захвата и удержания груза); на фиг.4 - то же, взаимное расположение деталей в момент сброса груза.25
Автоматический перекладчик грузов содержит захватный орган, под корпусом 1 которого размещены магниты 2, жестко закрепленные на тягах 3, соединенных с платформой 4 с возмож- 30 костью продольного перемещения в ее
пазах, которая установлена на направляющих 5 и поджата пружинами 6 к основанию корпуса 1. Магниты 2 находятся внутри облегающих их маг- 5 нитопроводных гильз 7, которые имеют в нижней части цилиндрические рас- точки, равные по глубине половине длины магнитов 2. На наружной поверхности гильз 7 навинчены немаг- дО нитопроводные втулки 8, которые удерживаются от свинчивания контргайками 9. Гильзы 7 установлены на корпусе 1 захватного органа с возможностью перемещения в его продольных 45 пазах и закреплены с помощью гаек 10. Захватный орган установлен на двух кривошипах 11 и 12 с параллельными осями 13-16. На оси 13 смонтирован регулируемый по углу срабаты- ,« вания толкатель 17, который взаимодействует со штифтом 18, жестко установленным на вертикальной стенке платформы 4, имеющей в продольном сечении тавровый профиль. С осью 15 гг соединен реверсивный привод движения захватного органа, состоящий из червячного редуктора 19, электродвигателя 20, соединеиньЕХ между собой посредством фрикционной муфты 21. Червяк 22 червячного редуктора 19 установлен в подвижной в осевом направлении втулке 23, на которую воздействует пружина 24. Втулка 23 соединена с переключателем 25. На оси 15 установлены кулачки 26 и 27, воздействующие соответственно на электрические переключатели 28 и 29. Переключатели 25 и 28 управляют направлением вращения электродвигателя 20. Переключатель 29 определяет исходное положение перекладчика.
Перекладчик работает следующим образом.
В исходном положении кривошипы 11 и 12 находятся в вертикальном положении. Кулачок 27 воздействует на электрический пер еключатель 29. Втулка 23 отведена посредством пружины 24 до упора влево (согласно фиг.2) и держит в нажатом состоянии электропереключатель 25. Переключатели 25 и 28 находятся в положениях, обеспечивающих вращение электродвигателя 20 в направлении перемещения люльки в зону захвата заготовок. Взаимное расположение деталей магнитного механизма соответствует изображению фиг.З, т.е. платформа 4 опущена пружинами 6 непосредственно на основание корпуса 1 захватного органа. Магниты 2 находятся в крайнем нижнем положении. При этом нижние части магнитов 2, равные половине их длины, находятся в цилиндрических расточках, выполненных в гильзах 7, и не имеют непосредственного контакта с магнитопроводным телом гильз, т.е. нижние концы магнитов 2 находятся в воздушном кольцевом промежутке, имеющем высокое сопротивление прохождению магнитного потока. Таким образом, образуется магнитная система, у которой одним полюсом является сам магнит 2 - его нижняя часть, находящаяся в расточке, а другим полюсом - нижняя часть магнитопроводных гильз 7. Магнитные силовые линии выходят в воздушное пространство преимущественно из торцевых поверхностей магнитов 2 и входят в торцевые поверхности гильз 7, т.е. в воздушном пространстве вокруг торцевых поверхностей магнитов 2 и гильз 7 имеются магнитные поля.
При получении сигнала Пуск электродвигатель 20 начинает вращаться.
Захватный орган по дуге окружности подходит к пачке листовых заготовок и нажимает на них торцевыми поверхностями втулок 8, незначительно выступающими над торцевыми поверхностями магнитов 2 и гильз 7. Магнитный поток проходит через магнито- проводное тело заготовки и она прилипает к торцевым поверхностям втулок 8.
При этом захватный орган и червячное колесо редуктора 19 останавливаются, а выходной вал электродвигателя 20 продолжает вращаться. Червяк 22, ввинчиваясь в зубья остановившегося червячного колеса, перемещает в осевом направлении втулку 23 вправо (фиг.2), что вызывает срабатывание переключателя 25, и выходной вал электродвигателя 20 начинает вращаться в обратную сторону. Для предотвращения заклинивания механизма в момент срабатывания переключателя 25 в конструкции перекладчика предусмотрена фрикционная проскальзывающая муфта 21.
Захватный орган, удерживая заготовку, начинает перемещаться по дуге окружности к месту сброса заготовки. Втулка -23 возвращается в исходное положение при помощи пружины 24 и осевого усилия червяка 22, В процессе работы перекладчика происходит синхронный разворот осей 13 и 14 в корпусе захватного органа. При этом толкатель 17, связанньй с «СЬЮ 13, нажимает в заданный момент на штифт 18 и поднимает платформу 4 по направляющим 5, сжимая пружины 6. Одновременно в расточках гильз 7 приподнимаются вверх и магниты 2 посредством тяг 3, связанных с платформой 4. Магниты 2 оказываются охваченными по всей их цилиндрической поверхности магнитопроводными поверхностями гильз 7. Магнитные потоки, создаваемые магнитами 2, замыкаются внутри гильз 7, практически не выходя наружу. При этом магниты 2 поднимаются на величину, несколько превьшающую половину их длины, снимая остаточную намагниченность материала гильз 7. Величина перемещения магнитов 2 выбирается опытным путем. Через заготовку перестают проходить магнитные потоки и она отпадает от торцевых поверхностей втулок 8.
В этот момент кулачок 26 нажимает на кнопку переключателя 28. Вал двигателя 20 начинает вращаться в об- ратную сторону и захватный орган уже без заготовки возвращается в исходное положение, которое фиксируется кулачком 27 и переключателем 29. Далее цикл переноса деталей повторя0 ется.
Для предотвращения захвата магнитным полем перекладчика одновременно более одной заготовки на гильзы 7 навинчены немагнитопроводные
5 втулки 8. Размером свинчивания их с гильзы 7 определяется величина магнитного потока, замыкающегося через заготовку, а следовательно, и сила притяжения заготовки к торцам вту0 лок 8,
Изменением величины расстояния от торцевых поверхностей втулок 8 до торцевых поверхностей магнитов 2 и гильз 7 обеспечивается захват пе5 рекладчиком одной заготовки из пакета. Выступание торцовых поверхностей втулок 8 над торцевыми поверхностями гильз 7 способствует и более надежному сбросу заготовок в заданном
0 месте.
Для осуществления захвата заготовок, имеющих различные габаритные размеры, магниты 2 с гильзами 7
имеют возможность перемещаться по па-
54
зам основания корпуса 1 захватного
органа и платформы 4. Месторасположение их на корпусе 1 захватного органа фиксируется гайками 10,
Формула изобретения
Автоматический перекладчик грузов, содержащий два кривс рша, одни концы которых соединены с реверсивным приводом их перемещения, и захватный орган с полым корпусом и толкателем для сброса изделий, смонтированными на осях вторых концов кривошипов, отличающийся тем, что, с целью повышения надежности при работе с ферромагнитными грузами
сложной конфигурации, в основании корпуса вьтолнены пазы, а перекладчик снабжен закрепленными в пазах корпуса гильзами, выполненными из немагнитного материала с внутренними расточками в их нижней части и с закрепленными на их наружной по-
верхности втулками из немагнитопро- водногс материала, торцы которых расположены ниже торцов гильз, при этом захватный орган дополнительно включает в себя постоянные магниты, подвижно установленные в нижней части гильз и выполненные с высотой, равной двум высотам проточки, и рас19
Фш.З
положенную в нижней части полости корпуса подпружиненную относительно его основания и соединенную тягами с постоянными магнитами платформу с вертикальной стенкой, в которой выполнены пазы для осей кривошипов и закреплен упор для взаимодействия с толкателем.
и
J I Я
Фм.Ч
| Автоматический вакуумный перекладчик грузов | 1983 |
|
SU1209559A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
