Изобретение относится к нодъемно тран спортному машиностроению, в частности к устройствам для автоматической подачи листовых заготовок, например печатных плат, в зону об- работки.
Известно вакуумное грузозахватно устройство, состоящее из траверсы с вакуумнонасосным оборудованием, р мы с вакуумными захватами, механиз- ма поворота рамы, при этом одна сто рона рамы с расположенными на ней вакуумными захватами снабжена по движным щитком, выполненным в виде решетки, шарнирно соединенной с ме- ханизмом подъема и опускания по следней, а другая, плоская сторона рамы, оборудована по периметру бор товыми ограничителями.
Рама с вакуумными захватами под ходит при помощи поворотного механима к листовой заготовке, и последняя притягивается к захватам под воздействием разряжения, создаваемого вакуумным насосом. Затем рама перемещается с заготовкой к месту назначения СП,
Однако устройство имеет сложную конструкцию и большие габариты.
Известен автоматический вакуум- ный перекладчик грузов, содержащий реверсивный привод, на выходном валу которого установлен кривошип с люлькой на свободном конце, и смон тированный на люльке вакуумный присос с атмосферным клапаном f2.
Однако в известном перекладчике люлька подвешена на оси кривошипа с помощью подшипников и направляется к заготовке лишь при помощи воздействия собственного веса, что не обеспечивает надежности в работе перекладчика. Для повьш1ения надежности захватьшания заготовки приходится утяжелять нижнюю часть люль ки, но и это не исключает заклинивания подшипников.
Кроме того, зачастую присос подходит к заготовке с перекосом, в результате чего шток управления не воздействует на датчик и электродвигатель привода продолжает вращаться при застопоренном вакуумном присосе, что приводит к преждевременному износу механизмов приво- да.
В известном перекладчике так- |же необходимо подведение к находя
5
0 5
о
-
5
0
0
щимся на его подвижных частях элементам (электромагнитному клапану и бесконтактному датчику) электрических проводов, которые в процессе работы перекладчика постоянно перегибаются то в одну, то в другую стороны и быстро выходят из строя.
Причем команда на срабатывание бесконтактного датчика подается при нажатии штока на пачку листовых заготовок, при этом на тонких заготовках и заготовках, изготовленных из мягких материалов, остается от воздействия штока след - вмятина, а иногда значительная деформация всей заготовки.
Цель изобретения - повышение надежности ус тройства в работе и сохранности перекладываемых грузов.
Указанная цель достигается тем, что в автоматический вакуумный перекладчик грузов, содержащий реверсивный привод, на выходном валу которого установлен кривошип с люлькой на свободном конце, и смонтированный на люльке вакуумный присос с атмосферным клапаном, снабжен дополнительным кривошипрм, один конец которого соединен с корпусом привода, а другой - с корпусом люльки и толкателем, закрепленным на другом конце дополнительного кривошипа для взаимодействия с атмосферным клапаном, при этом реверсивный привод выполнен с динамометрическим механизмом для переключения направления вращения выходного вала.
При вращении кривошипа вокруг одной оси (приводной) и другая (вспомогательная) ось совершает вращение. Толкатель, укрепленный на ней, движется по окружности и в нужный момент производит разгерметизацию вакуумного присоса. Заготовка отпадает от присоса.
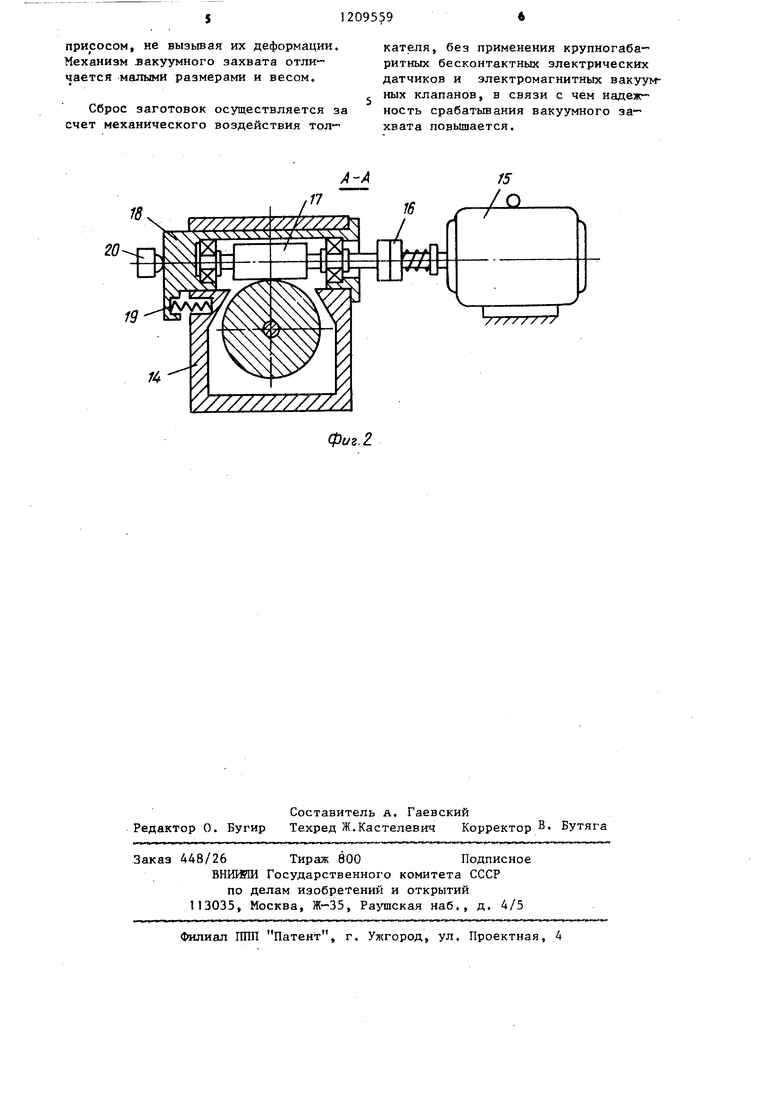
На фиг. 1 изображен автоматический вакуумный перекладчик, разрез; на фиг. 2 - разрез А-А на фиг. 1 (показан реверсивный привод движения перекладчика с динамометрическим механизмом и пере слючателем направления движения выходного вала).
Автоматический вакуумный перекладчик имеет люльку 1, присос 2, выполненный из эластичного материала, например из резины, короткую вакуумную трубку 3, загерметизированную прокладкой 4, которая закреп3
лена на рычаге 5, поджимаемом к торцу вакуумной трубки 3 пружиной 6. Люлька установлена на двух кривошипах 7 и 8 с параллельными осями 9-12 поворота. На оси 11 ус- тановлен регулируемый по углу ера- . батывания толкатель 13, ас осью 10 соединен реверсивный привод движения, состоящий из червячного редуктора 14, реверсивного электродвигателя 15, соединенньк между собой посредством фрикционной муфты 16. Червяк 17 червячного редуктора 14 установлен в подвижной в осевом направлении втулке 18, на которую воздействует пружина 19. Втулка 18 соединена с переключателем 20. На оси 10 установлен кулачок 21, воздействующий на электрический переключатель 22. Переключатели 20 и 22 управляют направлением вращения электродвигателя 15. На этой же оси 10 установлен кулачок 23, который воздействует на выключатель 24 исходного положения перекладчика. В станке, на котором установлен перекладчик, имеет командное устройство, подающее сигнал на начало цикла срабатьшания указанного перекладчика. Командное устройство на чертеже не показано.
Перекладчик работает следующим образом.
В исходном положении кривошипы 7 и 8 находятся в вертикальном положении. Вакуумная трубка уплотнена эластичной прокладкой 4. Кулачок 21 воздействует на электрический переключатель 22. Втулка 18 отведена посредством пружины 19 до упора в сторону (в левую, согласно фиг. 2) и держит в нажатом состоянии элект- ропереключатель 20. Переключатели 20 и 22 находятся в положениях, обеспечивающих вращение электродвигателя 15 в направлении перемещения люльки к пачке листовых заготовок, подлежащих подаче в зону обработки.
При получении сигнала от командного устройства на выключение электродвигатель 15 начинает вращаться. Люлька 1 по дуге окружности подходит к пачке листовых заготовок и нажимает эластичным присосом 2 на них. Воздух из присоса 2 вьщавлива- ется, и листовая заготовка прилипает к нему. При этом люлька 1 и червячное колесо редуктора 14 останавливаются, а электродвигатель 15
095594
продолжает вращаться. Червяк 17, как бы ввинчиваясь в остановившееся червячное колесо, перемещает в осевом направлении втулку 18 (вправо, согласно фиг. 2). Перемещение втулки 18 вызывает срабатывание переключателя 20, и электродвигатель 15 начинает вращаться в обратную сторону. Для предотвращения за-
IQ клинивания механизма в момент ера- батьшания переключателя 20 в конструкции его предусмотрена фрикционная проскальзывающая муфта 16. Люлька 1, удерживая заготовку,
15 начинает перемещаться по дуге окружности к месту сброса заготовки. Втулка 18 возвращается в исходное положение при помощи пружины I9 и осевого усилия червяка 17.
2Q Влагодаря наличию двух кривошипов 7 и 8 присос 2 совместно с заготовкой постоянно направлен вниз и не раскачивается. Люлька 1 перемещаясь в плоскости по дуге окруж25 ности, сама не вращается. В люльке 1 вращаются лищь оси 11 и 12, установленные в подшипниках. В конструкции перекладчика используется это вращение осей для пода™ чи команды на сброс заготовки с вакуумного присоса 2. Толкатель 13 установлен в такое положение на оси 11, вращающейся в момент движения перекладчика, что он в нужное время надавливает на рычаг 5,
приподнимает его, сжимая пружину 6, и тем самым открьшает канал вакуумной трубки 3. По этому каналу воздух проникает между присосом 2 и заготовкой, происходит раз-, герметизация системы, заготовка отпадает от присоса 2 в предназначенное место.
В этот момент, либо несколько позже, кулачок 21 нажимает на кноп ку переключателя 22. Двигатель 15 начинает вращаться в обратную сторону, и лкшька I уже без заготовки возвращается в исходное положение, которое фиксируется кулачком 23 и
50 переключателем 24.
Наличие двух кривошипов для удержания вакуумного захвата обеспечивает перемещение его постоянно присосом вниз, что гарантирует уве-
55 ренный захват заготовок и надежное срабатывание механизма реверсирования. Вакуумный захват касается заготовок только мягким резиновым
30
40
присосом, не вызьгоая их деформации. Механизм вакуумного захвата чается малыми размерами и весом.
J ных клапанов, в связи с чем надежСброс заготовок осуществляется за ность срабатьшания вакуумного за- счет механического воздействия тол- хвата повышается.
кателя, без применения крупногабаритных бесконтактных электрических датчиков и электромагнитных вакуум
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический вакуумный перекладчик грузов | 1985 |
|
SU1306880A2 |
| Автоматический перекладчик грузов | 1987 |
|
SU1491796A1 |
| Перекладчик | 1989 |
|
SU1678745A1 |
| Устройство для транспортировки листового материала вдоль линии прессов | 1975 |
|
SU555951A1 |
| Устройство для укладки хрупких изделий в тару | 1983 |
|
SU1129129A1 |
| Автомат для печатания ярлыков | 1981 |
|
SU1071455A1 |
| Автоматический питатель листовых заготовок | 1972 |
|
SU537915A1 |
| Вайма для сборки деревянных рам | 1977 |
|
SU791540A1 |
| Устройство для отделения листовых заготовок от стопы | 1980 |
|
SU978987A1 |
| ВСЕСОЮЗНАЯ ПАТЕНТйО-ТЕХпННЕСКА!!БИБЛИОТЕКА | 1971 |
|
SU306062A1 |

18
7
-А
фиг. 2.
Составитель А. Гаевский Редактор О. Бугир Техред Ж.Кастелевич Корректор В. Бутяга
448/26 Тираж 800Подписное
ВНИЖШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП Патент, г. Ужгород, ул. Проектная, 4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ВПТ5;•?"?>&' | 0 |
|
SU406793A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| 1972 |
|
SU430029A1 | |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
