лью изобретения является повышение j надежности его работы за счет принудительного устранения углового перекоса продольных осей кривошипов в момент прохождения ими мертвой точки. Автоматический вакуумный перекладчик грузов содержит люльку J. К люльке прикреплен присос 2. Люлька расположена на двух кривошипах 7 и 8 с параллельными осями 9,10,11 и 12. На оси 11 установлен толкатель 13. С осью 10 соединен реверсивный привод.
1
Изобретение относится к подъемно- транспортному машиностроению, в частности к устройствам для автоматической подачи листовых заготовок, например печатных плат, в зону обра- ботки, и является усоверше1|ствовани- ем перекладчика по авт.ев, № 1209559.
Целью изобретения является повышение надежности работы перекладчика за счет принудительного устранения углового перекоса продольных осей кривошипов в момент прохождения ими мертвой точки.
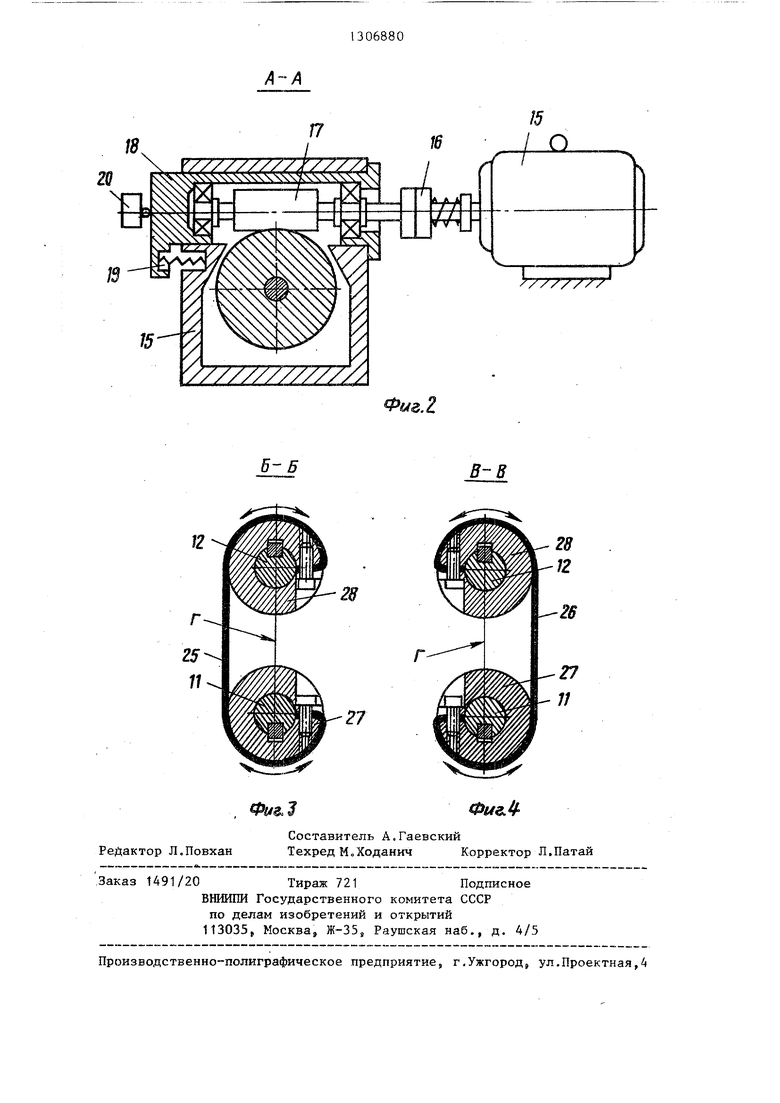
На фиг.1 изображен автоматический вакуумный перекладчик, разрез , на фиг.2 - разрез А-А на фиг.1 (реверсивный привод движения перекладчика с динамометрическим механизмом и переключателем направления движения вькодного вала), на фиг.З - разрез Б-Б на фиг.1 (один из элементов жесткой кинематической связи между осями поворота); на фиг.4 - разрез В-В на фиг.1 (другой элемент жесткой кине- матической связи).
Автоматический вакуумньш перекладчик содержит люльку 1, присос 2, вы- полненный из эластичного материала, например резины, короткую вакуумную трубку 3, загерметизированную прокладкой 4 и закрепленную на рычаге 5, который пружиной 6 поджимается к торцу вакуумной трубки 3. Люлька установлена на двух кривошипах 7 и 8 с параллельными осями 9-12 поворота. На оси 11 установлен регулируемый по углу срабатываний толкатель 13, а с осью 10 соединен реверсивнь1й приОси 11 и 12 соединены между собой жесткой кинематической связью, содержащей две стальные ленты, концы которых жестко закреплены в пазах барабанов 27 и 28, размещенных на осях 11 и 12. При вращении осей 11 и 12 в направлении по часовой стрелке одна лента скручивается с барабана 27 и накручивается на барабан 28, а другая лента скручивается с барабана 28 и накручивается на барабан 27. 4 ил.
вод движения, состоящий из червячного редуктора 14, реверсивного электродвигателя 15, соединенных между собой посредством фрикционной муфты 16. Червяк 17 червячного редуктора 14 установлен в подвижной в осевом направлении втулке 18, на которую воздействует пружина 19. Втулка 18 соединена с переключателем 20. На оси 10 установлен кулачок 21, воздействующий на электрический переключател 22. Переключатели 20 и 22 управляют направлением вращения электродвигателя 15. На оси 10 также установлен кулачок 23, которгэш воздейстаует на выключатель 24 исходного положения перекладчика. Оси 11 и 12 соединены между собой жесткой кинематической, связью, выполненной, например, в виде двух стальных лент 25 и 26, концы которых жестко закреплены в пазах барабанов 27 и 28 зафиксированных на осях 11 и 12 соответственно и имеющих одинаковые наружные диаметры. Ленты установлены таким образом, что при вращении осей 11 и 12 в направлении по часовой стрелке (фиг.З и 4) лента 25 скручивается с барабана 27 и накручивается на барабан 28, а лента 26 скручивается с барабана 28 и накручивается на барабан 27.
Жесткая кинематическая связь между осями 11 и 12 обеспечивается наличием, по меньшей мере двух лент 25 и 26, зеркально расположенных относительно плоскости симметрии Г, центрально проходящей через оси 11 и 12.
Предлагаемый перекладчик работает следующим, образом.
осью 11, поднимает рычаг 5 и осуществляет разгерметизацию вакуумного присоса. Заготовка отпадает от присоса. В этот момент кулачок 21 нажимает на кнопку переключателя 22, Двигатель 15 начинает вращаться в обратную сторону, и люлька 1 уже без заготовки возвращается в исходное положение, которое фиксируется кулачком 23 и
В исходном положении кривошипы 7 и 8 находятся в вертикальном положении. Вакуумная трубка 3 уплотнена эластичной прокладкой 4. Кулачок 21 воздействует на электрический пере- 5 ключатель 22. Втулка 18 отведена посредством пружины 19 до упора влево (согласно фиг.2) и держит в нажатом состоянии электропереключатель 20.
Переключатели 20 и 22 находятся в по- О переключателем 24. ложениях, обеспечивающих вращение электродвигателя 15 в направлении перемещения люльки 1 к пачке листовых
заготовок, подлежащих подаче в зону
обработки 5 кладчика обуславливает согласованное
При получении сигнала Пуск электродвигатель 15 начинает вращаться. Люлька 1 по дуге окружности подходит к пачке листовых заголовок и нажимает на них эластичным присосом 2. Воз-20 Равны между собой. Это принудительно дух вьщавливается из присоса 2 и лис- обеспечивает синхронное вращение ведущей 12 и ведомой 11 осей кривошиВращение осей 11 и 12 с закрепленными на них барабанами 27 и 28 соответственно в процессе работы переи разнонаправленное перематывание лент 25 и 26 с одного барабана на другой, -при котором длины перематываемых отрезков лент 25 и 26 всегда
пов, устраняя их вероятный угловой перекос во всем диапазоне перемещения
товая заготовка прилипает к нему. При этом люлька 1 и червячное колесо редуктора 14 останавливаются, а выходной вал электродвигателя 15 про-25 люльки, что особенно важно в момент должает вращаться. Червяк 17, ввин- прохождения кривошипами зоны мертвой чиваясь в зубья остановившегося червячного колеса, перемещает в осевом направлений втулку 18 вправо (согласно изображению на фиг.2). Перемеще- ЗО ние втулки 18 вызывает срабатывание переключателя 20, и электродвигатель 15 начинает вращаться в обратную сторону. Для предотвращения заклинивания механизма в момент срабатывания 35 переключателя 20 в конструкции предусмотрена фрикционная проскальзывающая муфта 16.
Лишька 1, удерживая заготовку, начинает перемещаться по дуге окруж- 40 ности к месту сброса заготовки. Втулка 18 возвращается в исходное положение
точки .
Формула изобретения
Автоматический вакуумный перекладчик грузов по авт. св. №1209559,0 т л и- ч ающий с я тем, что, с целью повьшения надежности его за счет принудительного устранения углового перекоса продольных осей кривошипов в момент прохождения ими мертвой точки, концы кривошипов, соединенные с корпусом люльки и толкателем, вьтолнены по крайней мере с двумя радиальными диаметрально расположенными пазами, расположенными враз- личных вертикальных плоскостях, а перекладчик снабжен стальными лентами.
при помощи пружины 19 и осевого усилия червяка 17. В процессе работы переАвтоматический вакуумный перекла чик грузов по авт. св. №1209559,0 т л ч ающий с я тем, что, с целью повьшения надежности его за счет принудительного устранения углового перекоса продольных осей кри вошипов в момент прохождения ими мер вой точки, концы кривошипов, соединенные с корпусом люльки и толкателем, вьтолнены по крайней мере с дв мя радиальными диаметрально располо женными пазами, расположенными враз личных вертикальных плоскостях, а пер кладчик снабжен стальными лентами.
кладчика происходит синхронный разво-45 концы каждой из которых закреплены
рот осей 11 и 12 в корпусе люльки 1. При этом толкатель 13, связанный с
68804
осью 11, поднимает рычаг 5 и осуществляет разгерметизацию вакуумного присоса. Заготовка отпадает от присоса. В этот момент кулачок 21 нажимает на кнопку переключателя 22, Двигатель 15 начинает вращаться в обратную сторону, и люлька 1 уже без заготовки возвращается в исходное положение, которое фиксируется кулачком 23 и
5 ереключателем 24.
Вращение осей 11 и 12 с закрепленными на них барабанами 27 и 28 соответственно в процессе работы перекладчика обуславливает согласованное
Равны между собой. Это принудительно обеспечивает синхронное вращение ведущей 12 и ведомой 11 осей кривошии разнонаправленное перематывание лент 25 и 26 с одного барабана на другой, -при котором длины перематываемых отрезков лент 25 и 26 всегда
пов, устраняя их вероятный угловой перекос во всем диапазоне перемещения
люльки, что особенно важно в момент прохождения кривошипами зоны мертвой
люльки, что особенно важно в момент прохождения кривошипами зоны мертвой
точки .
Формула изобретения
Автоматический вакуумный перекладчик грузов по авт. св. №1209559,0 т л и- ч ающий с я тем, что, с целью повьшения надежности его за счет принудительного устранения углового перекоса продольных осей кривошипов в момент прохождения ими мертвой точки, концы кривошипов, соединенные с корпусом люльки и толкателем, вьтолнены по крайней мере с двумя радиальными диаметрально расположенными пазами, расположенными враз- личных вертикальных плоскостях, а перекладчик снабжен стальными лентами.
в пазах, расположенных в одной вертикальной плоскости.
Ю I О
//:
5Ф4/г.2
ЯРедактор Л.Повхан
Составитель А.Гаевский
Техред МоХоданич Корректор Л.Патай
Заказ 1491/20 Тираж 721Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035 Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул,Проектная,4
Фие.

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический вакуумный перекладчик грузов | 1983 |
|
SU1209559A1 |
| Автоматический перекладчик грузов | 1987 |
|
SU1491796A1 |
| Перекладчик | 1989 |
|
SU1678745A1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ИЗДЕЛИЙ | 1996 |
|
RU2142391C1 |
| Автомат для изготовления апертурных карт | 1976 |
|
SU655569A1 |
| Качающийся питатель | 1985 |
|
SU1316943A2 |
| СТАНОК ДЛЯ ОБРАБОТКИ РЕЗАНИЕМ ПАЗОВ В ОТВЕРСТИИ ДЕТАЛИ | 1992 |
|
RU2088385C1 |
| Ленточно-шлифовальный станок | 1979 |
|
SU865627A1 |
| Ленточно-шлифовальный станок для обработки лопаток | 1978 |
|
SU732127A1 |
| Установка для индукционного нагрева деталей | 1985 |
|
SU1458396A1 |
Изобретение относится к области подъемно-транспортного машиностроения, в частности к автоматическим вакуумным перекладчикам грузов. ЦеФиг.1 12 22 2Ц
