| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1982 |
|
SU1098896A1 |
| Грузозахватное устройство | 1989 |
|
SU1776623A1 |
| Захватное устройство | 1990 |
|
SU1792908A1 |
| Контейнер для транспортировки жи-ВОй Рыбы | 1979 |
|
SU805965A2 |
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЦИЛИНДРИЧЕСКИХ ГРУЗОВ | 2015 |
|
RU2595204C1 |
| Захватное устройство | 1987 |
|
SU1493582A1 |
| Захватное устройство для грузов с цапфой | 1987 |
|
SU1491801A1 |
| Устройство для автоматического сбрасывания стропов с крюка | 1982 |
|
SU1073178A1 |
| Грузозахватное устройство | 1988 |
|
SU1586991A1 |
Изобретение относится к подъемно-транспортному оборудованию и может быть использовано для захвата различных грузов с цапфами. Цель изобретения - повышение надежности и упрощение конструкции. Захватное устройство включает траверсу 1 П-образной формы с петлей 21. Вертильные элементы 3 траверсы снабжены зевами для размещения в них цапф 5 груза 6 и двуплечими рычагами. Один из концов каждого рычага перекрывает зев, а другие концы связаны между собой канатом и соединены через пружину с вертикальными элементами 3 траверсы 1. При захвате груза 6 его цапфы 5 оказывают давление на рычаг, который при этом отклоняется внутрь зева. После размещения цапфы 5 в зеве рычаг под действием пружины возвращается в исходное положение. Груз готов к транспортировке. Перед окончанием транспортировки воздействуют на канат, соединяющий рычаги. При этом рычаги открывают зевы. При дальнейшем опускании груза 6 его цапфы выходят из зевов. 6 ил.
4;ii со
СХ)
Изобретение относится к подъемно- транспортному оборудованию и может быть использовано для захвата различных грузов с цапфами.
Цель изобретения - повышение надежности и упрощение конструкции.
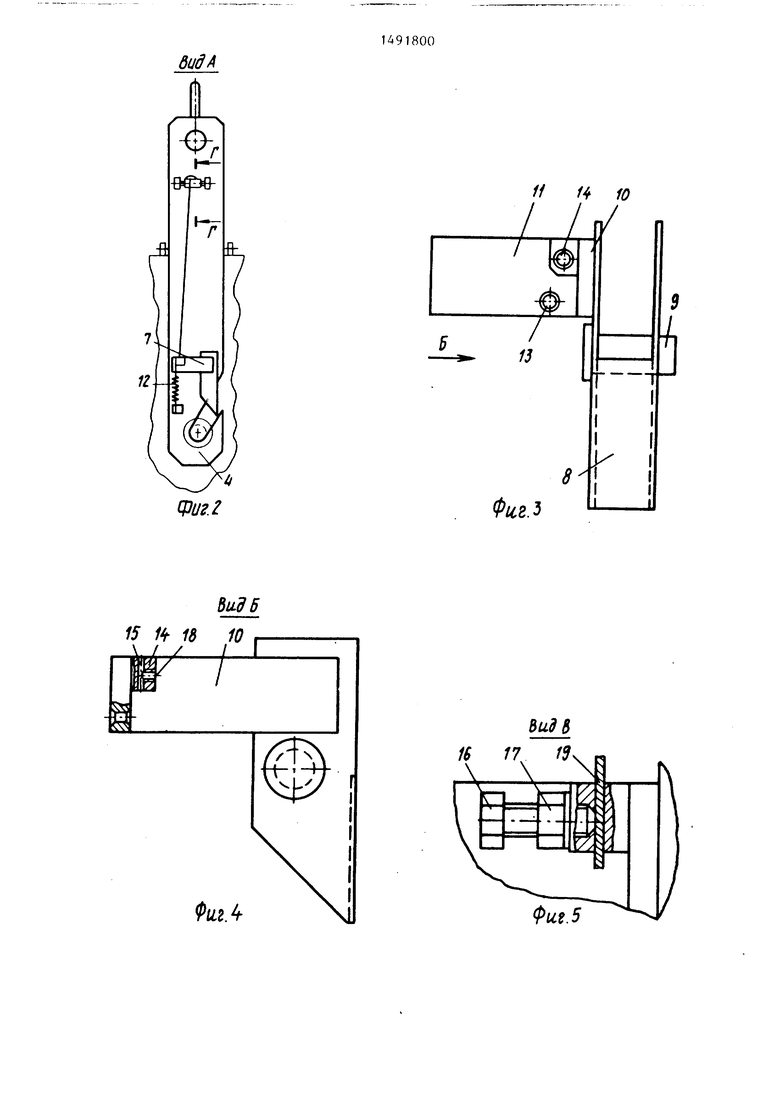
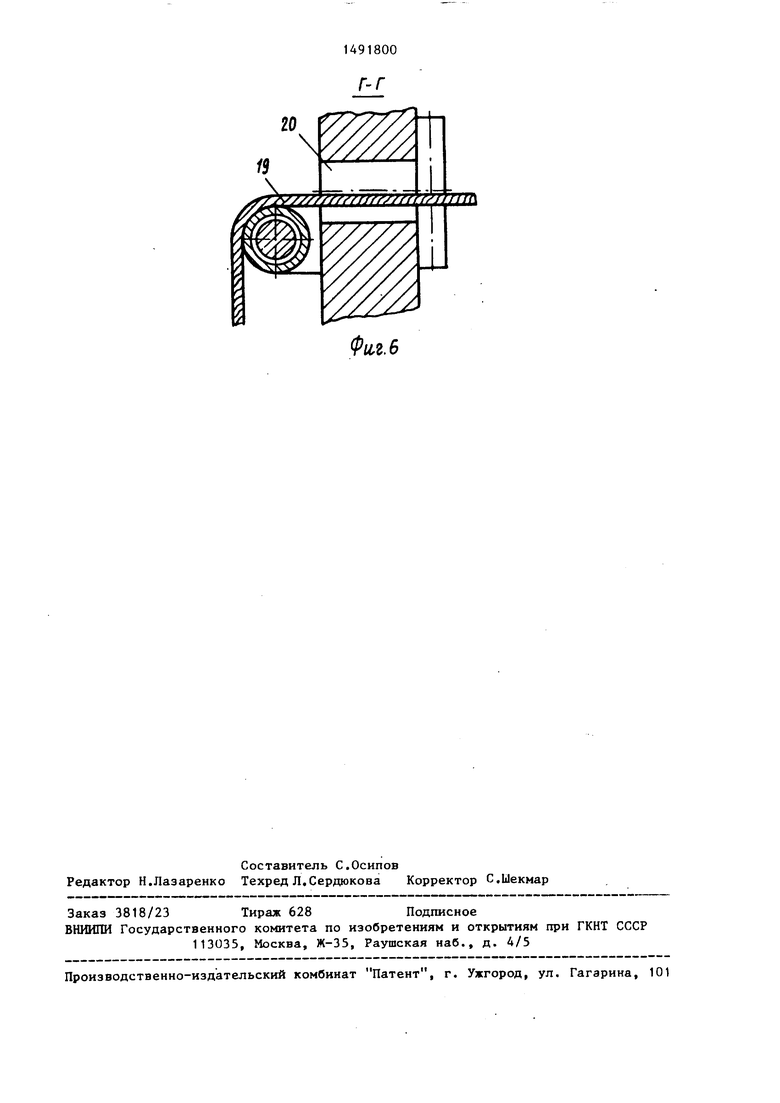
На фиг.1 изображено захватное устройство, o6ivift вчд; на фиг.2 - вид А на фиг.1; на фиг.З - двуплечий рычаг захватного устройства; на фиг.4 - вид Б на фиг.З; на фиг.З - вид В на фиг.1; на фиг.6 разрез Г-Г на фиг.2.
Захватное устройство для грузов цапфами состоит из траверсы 1 П-об- разной формы. Горизонтальный участок выполнен из швеллеров и имеет в своем составе оси 2, на которые установлены вертикальные элементы 3 траверсы 1, снабженные в нижней своей части захватными крюками 4, зевы которых выполнены в виде наклонного паза.
Для надежного удержания цапф 5 бадей 6 или вагонеток на захватных крюках 4 установлены фиксаторы, которые выполнены в виде двуплечего рычага 7. Одно плечо 8 фиксатора выполнено П-образной формы, стойки плеча на оси 9 закреплены на вертикальном элементе 3, а его перекрьшает зев захватного крюка 4. Другое плечо 10 снабжено ручкой 11, которая может служить для открывания зева захватного крюка 4. Ручка 11 связана пружиной 12 через отверстие 13 с вертикальным элементом 3.
Ручка 11 снабжена бобьшкой 14, в отверстии 15 которой при помощи болта 16, установленного в резьбовом оверстии 17, и гайки 18 закреплен кнец каната 19.
Посредством каната 19 через от- верст я 20, вьтолненные в вертикальных элементах 3, ручки 11 обоих двплечих рычагов 7 связаны между собой.
В средней части горизонтального участка траверсы 1 установлена петля 21 для навешивания устройства на крюк грузоподъемного механизма.
Захватное устройство работает сл дукнцим образом.
Устройство при помощи грузоподъемного механизма подводят к грузу 6, подлежащему транспортированию, таким
образом, что заходные отверстия зевов захватных крюков 4 располагаются ниже цапф 5. Затем, прижимая траверсу 1 к цапфам 5 груза 6, осуществляют подъем устройства. При этом цапфы
5, воздействуя на плечи 8 рычагов 7, отклоняют их вовнутрь зева, обеспечивая беспрепятственньм проход цапф
5в зевы захватных крюков 4. После размещения цапф 5 в зевах рычаги 7
под действием пружин 12 возвращаются в исходное положение, чем достигается надежный захват крюками 4 цапф 5 груза 6.
По окончании перемещения перед установкой груза 6 на место транспортировки натягивают канат 19 на горизонтальном участке. При этом рычаги 7 поворачиваются относительно оси 9 вовнутрь зевой, чем обеспечивается
беспрепятственный выход цапф 5 груза
6при дальнейшем опускании устройства. После выхода цапф 5 силовое воздействие на канал 19 прекращают. Рычаги 7 занимают под действием пружин
12 исходное положение. Устройство готово для захвата следукнцего груза. Формула изобретения
Захватное устройство для грузов
с цапфами, содержащее траверсу П- образной формы, вертикальные элементы которой выполнены с зевами в нижней части и размещены на вертикальных элементах, кинематически
связанные между собой поворотные фиксаторы для цапф, отличающееся тем, что, с целью повышения надежности и упрощения конструкции, зевы выполнены наклонныьШ, а фиксаторы представляют собой двуплечие рычаги, одно плечо каждого из которых вьтолнено с П-образньм профилем и размещено с возможностью перекрытия перемычкой зева соответствующего вертикального элемента траверсы, а упомянутая связь фиксаторов представляет собой гибкую тягу, соединенную с вторыми плечами рычагов, которые подпружинены относительно вертикальных элементов траверсы.
цзиг.г
Ьи.д6
/5 /f 1Ь 10 г / / / I
Фиг.
11 1 10
1В
Фи.5
Фиг. 6
| Захватное устройство для грузов с цапфами | 1979 |
|
SU880948A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
