(Л
4
СО
оо ел
00
N:
77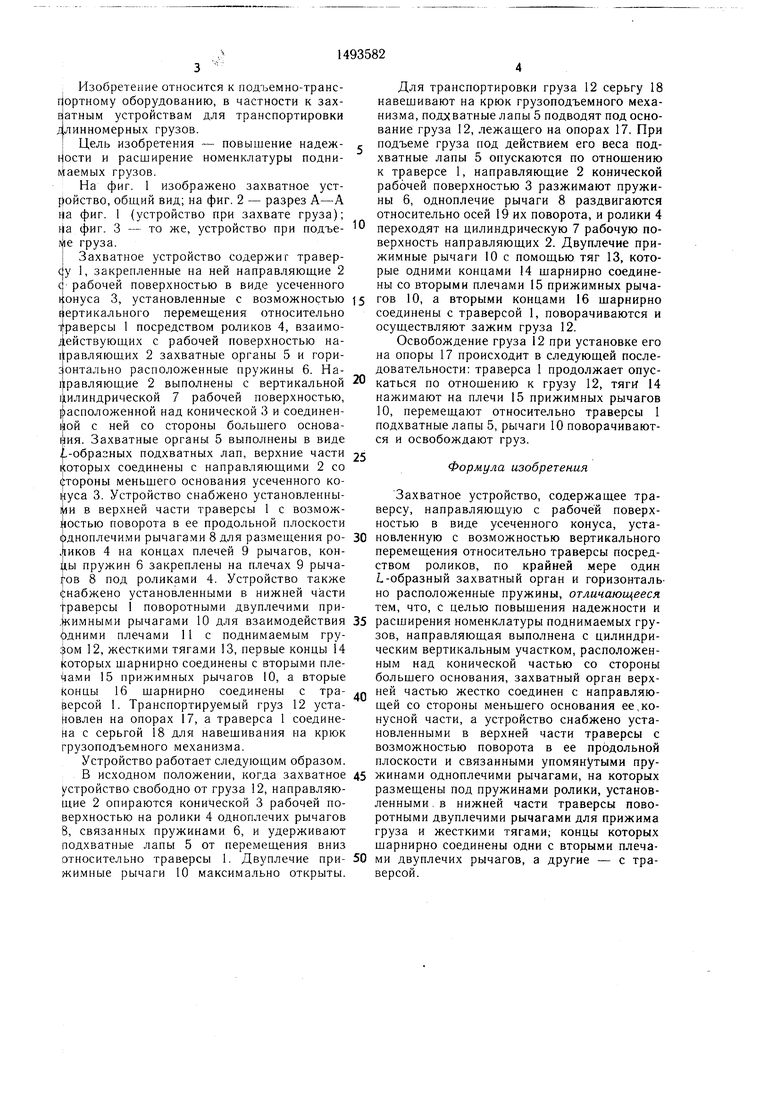
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для труб | 1986 |
|
SU1425165A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| Захватное устройство для труб | 1980 |
|
SU952720A1 |
| Грузозахватное устройство | 1978 |
|
SU765183A1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| Захватное устройство для труб | 1979 |
|
SU885136A1 |
| Автоматический захват | 1971 |
|
SU537020A1 |
| Захватное устройство для длинномерных грузов | 1981 |
|
SU1071565A1 |
| Грузозахватное устройство | 1973 |
|
SU645924A1 |
| Захват-кантователь | 1983 |
|
SU1110740A1 |
Изобретение относится к подъемно-транспортному оборудованию ,в частности, к захватным устройствам для транспортировки длинномерных грузов. Целью изобретения является повышение надежности и расширение номенклатуры поднимаемых грузов. Захват и удержание груза 12 в подхватных лапах 5 происходит при помощи прижимных двуплечих рычагов 10, установленных в нижней части траверсы 1. Вертикальное перемещение подхватных лап 5 относительно траверсы 1 для захвата и освобождения груза осуществляется под действием массы груза 12 посредством роликов 4, установленных на плечах рычагов 8, размещенных в верхней части траверсы 1. Ролики 4 взаимодействуют поочередно с конической 3 и цилиндрической 7 рабочими поверхностями направляющих 2, соединенных с верхней частью подхватных лап 5. 3 ил.
//////////Y///77//// фие.2
Изобретение относится к подъемно-транс- гортному оборудованию, в частности к зах- Еатным устройствам для транспортировки длинномерных грузов.
Цель изобретения - повышение надеж- bjocTH и расширение номенклатуры подни- лЫемых грузов.
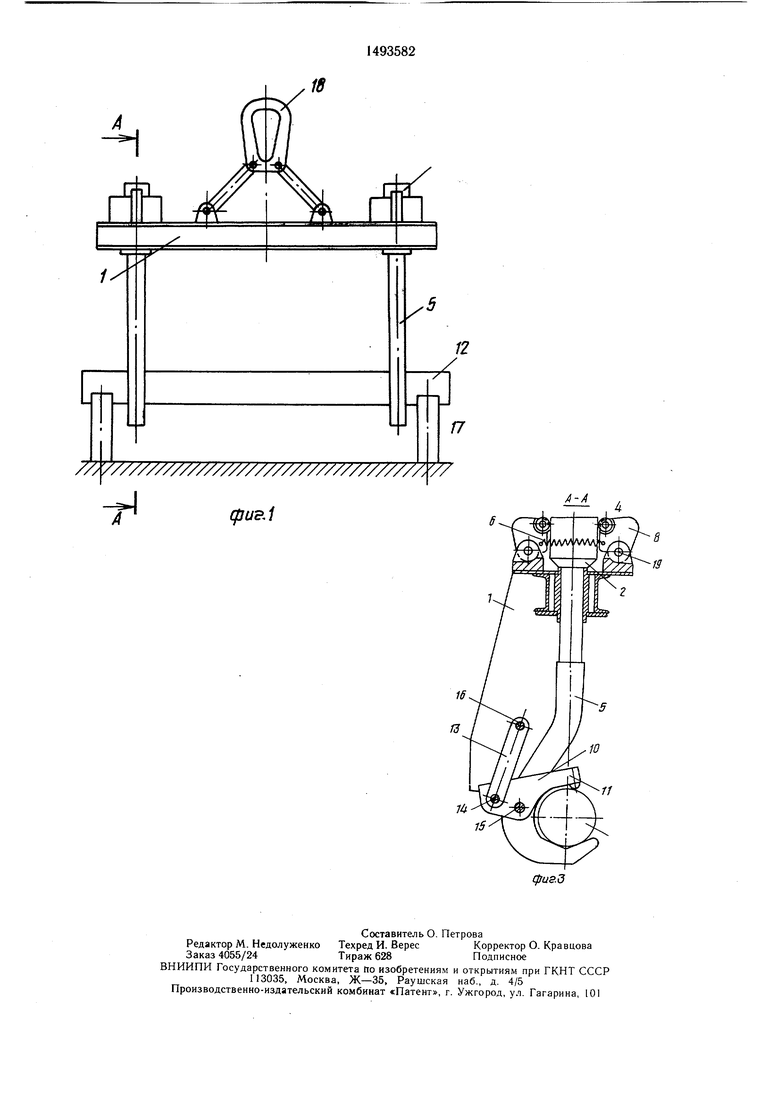
На фиг. 1 изображено захватное устройство, обш,ий вид; на фиг. 2 - разрез А-А на фиг. 1 (устройство при захвате груза); t|a фиг. 3 - то же, устройство при подъеме груза.
Захватное устройство содержи г травер- cjy 1, закрепленные на ней направляющие 2 рабочей поверхностью в виде усеченного
Для транспортировки груза 12 серьгу 18 навешивают на крюк грузоподъемного механизма, подхватные лапы 5 подводят под основание груза 12, лежаш,его на опорах 17. При
с подъеме груза под действием его веса под- хватные лапы 5 опускаются по отношению к траверсе 1, направляющие 2 конической рабочей поверхностью 3 разжимают пружины 6, одноплечие рычаги 8 раздвигаются относительно осей 19 их поворота, и ролики 4
0 переходят на цилиндрическую 7 рабочую поверхность направляющих 2. Двуплечие прижимные рычаги 10 с помощью тяг 13, которые одними концами 14 щарнирно соединены со вторыми плечами 15 прижимных рычаконуса 3, установленные с возможностью 15 О- з вторыми концами 16 шарнирно
соединены с траверсой 1, поворачиваются и осушествляют зажим груза 12.
20
ертикального перемещения относительно траверсы 1 посредством роликов 4, взаимо- Действуюндих с рабочей поверхностью направляющих 2 захватные органы 5 и горизонтально расположенные пружины 6. На- иравляюшие 2 выполнены с вертикальной 1|1илиндрической 7 рабочей поверхностью, асположенной над конической 3 и соединен- ой с ней со стороны большего основа- ия. Захватные органы 5 выполнены в виде -образных подхватных лап, верхние части 25 оторых соединены с направляющими 2 со йтороны меньшего основания усеченного ко- itiyca 3. Устройство снабжено установленны- 1|1и в верхней части траверсы 1 с возмож- 11остью поворота в ее продольной плоскости
соединены с траверсой 1, поворачиваются и осушествляют зажим груза 12.
Освобождение груза 12 при установке его на опоры 17 происходит в следующей последовательности: траверса 1 продолжает опускаться по отношению к грузу 12, тяги 14 нажимают на плечи 15 прижимных рычагов 10, перемещают относительно траверсы 1 подхватные лапы 5, рычаги 10 поворачиваются и освобождают груз.
Формула изобретения
Захватное устройство, содержащее траверсу, направляющую с рабочей поверхностью в виде усеченного конуса, уста(рдноплечими рычагами 8 для размещения ро- 30 новленную с возможностью вертикального
ликов 4 на концах плечей 9 рычагов, кон- 1|1ы пружин 6 закреплены на плечах 9 рыча- IOB 8 под роликами 4. Устройство также Снабжено установленными в нижней части tpaBepcbi 1 поворотными двуплечими приперемещения относительно траверсы посредством роликов, по крайней мере один L-образный захватный орган и горизонтально расположенные пружины, отличающееся тем, что, с целью повыщения надежности и
.имными рычагами 10 для взаимодействия35 расщирения номенклатуры поднимаемых гру- ({здними плечами 11 с поднимаемым гру-зов, направляющая выполнена с цилиндри- фом 12, жесткими тягами 13, первые концы 14ческим вертикальным участком, расположен- оторых шарнирно соединены с вторыми пле-ным над конической частью со стороны kamv( 15 прижимных рычагов 10, а вторыебольшего основания, захватный орган верх- Концы 16 шарнирно соединены с тра-дд ней частью жестко соединен с направляю- еерсой 1. Транспортируемый груз 12 уста-щей со стороны меньшего основания ее,ко- Новлен на опорах 17, а траверса 1 соедине-нусной части, а устройство снабжено уста- На с серьгой 18 для навешивания на крюкновленными в верхней части траверсы с грузоподъемного механизма.возможностью поворота в ее продольной Устройство работает следующим образом.плоскости и связанными упомянутыми пру- В исходном положении, когда захватное45 жинами одноплечими рычагами, на которых устройство свободно от груза 12, направляю-размещены под пружинами ролики, установ- щие 2 опираются конической 3 рабочей по-ленными, в нижней части траверсы пово- верхностью на ролики 4 одноплечих рычаговротными двуплечими рычагами для прижима 8, связанных пружинами 6, и удерживаютгруза и жесткими тягами; концы которых подхватные лапы 5 от перемещения внизшарнирно соединены одни с вторыми плеча- относительно траверсы 1. Двуплечие при-50 ми двуплечих рычагов, а другие - с тра- жимные рычаги 10 максимально открыты.версой.
Для транспортировки груза 12 серьгу 18 навешивают на крюк грузоподъемного механизма, подхватные лапы 5 подводят под основание груза 12, лежаш,его на опорах 17. При
подъеме груза под действием его веса под- хватные лапы 5 опускаются по отношению к траверсе 1, направляющие 2 конической рабочей поверхностью 3 разжимают пружины 6, одноплечие рычаги 8 раздвигаются относительно осей 19 их поворота, и ролики 4
переходят на цилиндрическую 7 рабочую поверхность направляющих 2. Двуплечие прижимные рычаги 10 с помощью тяг 13, которые одними концами 14 щарнирно соединены со вторыми плечами 15 прижимных рыча О- з вторыми концами 16 шарнирно
О- з вторыми концами 16 шарнирно
соединены с траверсой 1, поворачиваются и осушествляют зажим груза 12.
Освобождение груза 12 при установке его на опоры 17 происходит в следующей последовательности: траверса 1 продолжает опускаться по отношению к грузу 12, тяги 14 нажимают на плечи 15 прижимных рычагов 10, перемещают относительно траверсы 1 подхватные лапы 5, рычаги 10 поворачиваются и освобождают груз.
Формула изобретения
Захватное устройство, содержащее траверсу, направляющую с рабочей поверхностью в виде усеченного конуса, установленную с возможностью вертикального
перемещения относительно траверсы посредством роликов, по крайней мере один L-образный захватный орган и горизонтально расположенные пружины, отличающееся тем, что, с целью повыщения надежности и
/// У////////////////////////////////////.
У/
/i-A
lU
| ЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ ТРУБ В ВЕРТИКАЛЬНОМПОЛОЖЕНИИ | 0 |
|
SU308965A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
